高空作业平台及高空作业平台控制方法与流程
本公开涉及工程机械领域,尤其涉及一种高空作业平台及高空作业平台控制方法。
背景技术:
1、脚手架等传统高空作业设备已无法满足当前高空作业的需求,高空作业平台应运而生。高空作业平台作为脚手架等传统高空作业设备的替代品,在安全性、经济性、便利性等方便有着巨大优势。全性与操控性至关重要。
2、相关技术中的高空作业平台大部分情况下均在露天环境下作业,一些防御装置的钢丝绳通过磁块吸合,烈日长期炙烤会导致钢丝绳两端磁块产生消磁现象,磁性呈不可逆趋势逐渐减弱,且依靠磁块吸合容易受到鸟类、震动颠簸影响,导致误脱落,稳定性较差,在解除危险后需要手动将钢丝绳复位,设备才能正常运行,反复繁杂操作影响工作人员正常作业,且存在安全隐患。
技术实现思路
1、有鉴于此,本公开实施例提供一种高空作业平台及高空作业平台控制方法,有助于提高高空作业平台的可靠性。
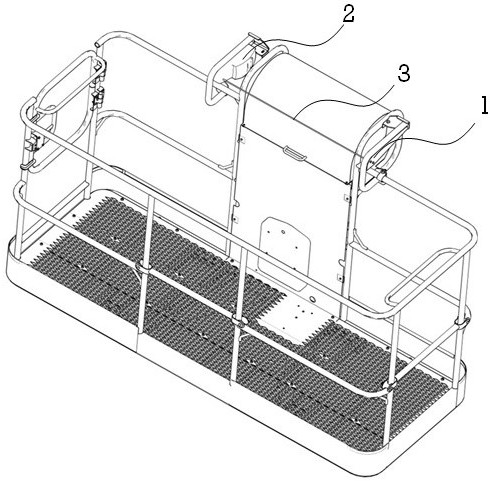
2、在本公开的一个方面,提供一种高空作业平台,包括:
3、安装支架;
4、复位检测装置,设置于安装支架的一侧,具有复位组件和检测组件;
5、拉绳,跨设于安装支架的两侧,拉绳的第一端与安装支架远离复位检测装置的一侧固定连接,拉绳的第二端与复位组件连接,拉绳的第二端被配置为随所受拉绳受到高空作业平台内操作人员的挤压而离开初始位置;
6、其中,检测组件被配置为检测拉绳的第二端是否移动,复位组件被配置为响应于高空作业平台内的操作人员解除对拉绳的挤压,使拉绳的第二端返回初始位置;
7、高空作业平台还包括:
8、动作输出阀,用于控制高空作业平台的多个机动动作的启停;
9、处理器,与复位检测装置和动作输出阀信号连接,被配置为响应于检测组件的检测结果,在拉绳被挤压时关闭多个动作输出阀,在拉绳复位时重启多个动作输出阀。
10、在一些实施例中,复位组件包括:
11、转盘,与拉绳的第二端固定连接,被配置为随拉绳的第二端的移动而转动;
12、其中,检测组件包括:
13、传动件,与转盘传动连接,被配置为随转盘的转动而转动;
14、检测开关,与传动件相邻设置,被配置为检测传动件是否转动;
15、其中,处理器与传动件和检测开关均信号连接,被配置为响应于检测开关的检测结果,在传动件转动时关闭多个动作输出阀,在传动件复位时重启多个动作输出阀。
16、在一些实施例中,拉绳被配置为在拉绳的第二端处于初始位置时至少部分卷绕于转盘。
17、在一些实施例中,传动件包括:
18、第一啮合元件,与转盘固定连接,被配置为随转盘转动;和
19、第二啮合元件,与第一啮合元件啮合传动;
20、其中,检测开关被配置为检测第二啮合元件的转动。
21、在一些实施例中,复位检测装置包括:
22、安装板,转盘设置于安装板;
23、检测组件包括:
24、内部安装体,与安装板沿转盘的轴线间隔设置,第二啮合元件和检测开关设置于内部安装体;
25、其中,内部安装体具有安装孔,第一啮合元件穿过安装孔与第二啮合元件传动连接。
26、在一些实施例中,第二啮合元件的数量为两个,分别设置于第一啮合元件的两侧;
27、其中,检测开关的数量为两个,两个检测开关分别检测两个第二啮合元件中的其中一个第二啮合元件的转动。
28、在一些实施例中,复位组件还包括:
29、弹性件,弹性件的一端与转盘连接,弹性件的另一端与安装板或检测组件固定连接,弹性件被配置为响应于高空作业平台内的操作人员解除对拉绳的挤压,拉动拉绳的第二端复位。
30、在一些实施例中,复位检测装置还包括:
31、盖体,盖合于内部安装体,第二啮合元件、检测开关位于盖体与内部安装体之间形成的空间内;
32、壳体,盖合于安装板,检测组件和复位组件位于安装板和壳体之间形成的空间内。
33、在一些实施例中,高空作业平台还包括:
34、主控制装置,与处理器信号连接,被配置为根据操作人员的指令向处理器输出相应的信号,以控制多个动作输出阀的开闭;
35、其中,处理器被进一步配置为:
36、响应于检测组件的检测结果,在拉绳被挤压时,断开主控制装置对多个动作输出阀的控制;
37、在高空作业平台内操作人员解除对拉绳的挤压时,重连主控制装置对多个动作输出阀的控制。
38、在一些实施例中,高空作业平台还包括:
39、蜂鸣器,用于发出声光报警;
40、显示器,用于显示高空作业平台的工作状态;
41、其中,处理器与蜂鸣器和显示器信号连接,被配置为:
42、响应于检测组件的检测结果,在拉绳被挤压时使蜂鸣器发出声光报警,并使显示器显示危险状态;
43、在高空作业平台内操作人员解除对拉绳的挤压时,使蜂鸣器停止发出声光报警,并使显示器显示危险解除状态。
44、在本公开实施例的一个方面,提供一种基于上述任一实施例的高空作业平台控制方法,包括:
45、通过拉绳探测位于高空作业平台内操作人员的身体姿态;
46、通过检测组件检测拉绳的第二端是否随所受拉绳被挤压而移动;
47、在拉绳被挤压时关闭多个动作输出阀,在高空作业平台内操作人员解除对拉绳的挤压时重启多个动作输出阀。
48、在一些实施例中,高空作业平台还包括主控制装置,被配置为根据操作人员的指令控制多个动作输出阀的开闭;
49、其中,高空作业平台控制方法还包括:
50、在拉绳被挤压时,断开主控制装置对多个动作输出阀的控制,在高空作业平台内操作人员解除对拉绳的挤压时,重连主控制装置对多个动作输出阀的控制。
51、在一些实施例中,高空作业平台还包括蜂鸣器和显示器,蜂鸣器用于发出声光报警,显示器用于显示高空作业平台的工作状态;
52、其中,高空作业平台控制方法还包括:
53、响应于检测组件的检测结果,在拉绳被挤压时,使蜂鸣器发出声光报警,并使显示器显示危险状态,在高空作业平台内操作人员解除对拉绳的挤压时,使蜂鸣器停止发出声光报警,并使显示器显示危险解除状态。
54、因此,根据本公开实施例,设置复位检测装置通过对拉绳的状态检测获取操作人员的安全情况,当操作人员处于不安全的位置时紧急制动高空作业平台的各动作输出,减少对操作人员的进一步挤压伤害,保证操作人员的人身安全,当操作人员脱离危险位置,拉绳的第二端能自动复位至初始位置,无需手动复位,不会因反复繁杂操作影响工作人员正常作业,能够提高高空作业平台的安全性和可靠性,为高空作业平台操作人员提供更加安全的工作环境。
技术特征:
1.一种高空作业平台,其特征在于,包括:
2.如权利要求1所述的高空作业平台,其特征在于,所述复位组件(21)包括:
3.如权利要求2所述的高空作业平台,其特征在于,所述拉绳(3)被配置为在所述拉绳的第二端(32)处于初始位置时至少部分卷绕于所述转盘(211)。
4.如权利要求2所述的高空作业平台,其特征在于,所述传动件(221)包括:
5.如权利要求4所述的高空作业平台,其特征在于,所述复位检测装置(2)包括:
6.如权利要求4所述的高空作业平台,其特征在于,所述第二啮合元件(221b)的数量为两个,分别设置于所述第一啮合元件(221a)的两侧;
7.如权利要求2所述的高空作业平台,其特征在于,所述复位检测装置(2)还包括:
8.如权利要求5所述的高空作业平台,其特征在于,所述复位检测装置(2)还包括:
9.如权利要求1所述的高空作业平台,其特征在于,还包括:
10.如权利要求1所述的高空作业平台,其特征在于,还包括:
11.一种基于上述权利要求1~10任一所述的高空作业平台的高空作业平台控制方法,其特征在于,包括:
12.如权利要求11所述的高空作业平台控制方法,其特征在于,所述高空作业平台还包括主控制装置(6),被配置为根据操作人员的指令控制所述多个动作输出阀(4)的开闭;
13.如权利要求11所述的高空作业平台控制方法,其特征在于,所述高空作业平台还包括蜂鸣器(7)和显示器(8),所述蜂鸣器(7)用于发出声光报警,所述显示器(8)用于显示高空作业平台的工作状态;
技术总结
本公开涉及一种高空作业平台及高空作业平台控制方法,高空作业平台包括:安装支架;复位检测装置,设置于安装支架的一侧,具有复位组件和检测组件;拉绳的第二端被配置为随所受拉绳受到高空作业平台内操作人员的挤压而离开初始位置;检测组件被配置为检测拉绳的第二端是否移动,复位组件被配置为响应于高空作业平台内的操作人员解除对拉绳的挤压,使拉绳的第二端返回初始位置;高空作业平台还包括动作输出阀,用于控制高空作业平台的多个机动动作的启停;处理器与复位检测装置和动作输出阀信号连接,被配置为响应于检测组件的检测结果,在拉绳被挤压时关闭多个动作输出阀,在拉绳复位时重启多个动作输出阀。
技术研发人员:靳翠军,周皓,朱晓鹏,汤家升,陈栋
受保护的技术使用者:徐工消防安全装备有限公司
技术研发日:
技术公布日:2024/10/17
- 还没有人留言评论。精彩留言会获得点赞!