基于连续半自动状态下的抓斗定位方法及系统与流程
本发明涉及半自动化控制,具体为一种基于连续半自动状态下的抓斗定位方法及系统。
背景技术:
1、半自动化是指在人的干预下自动进行工作循环的自动化方式,半自动化一般在工作机械自动完成一次工作循环之后自动关断,所有的机构退回起始位置,连续半自动状态下的抓斗在工业生产中可以辅助人工完成各种承载上料的过程,在生产中得到了广泛的使用;现有的抓斗定位方法基本可以满足日常的生产需求,但仍存在一定的不足之处,其一,现有抓斗定位方法大多通过采集抓斗上的位置传感器来进行单点定位,无法同步分析抓斗中夹爪的状态,难以满足用户的个性化需求,影响了方法的使用性;其二,现有的抓斗定位方法步骤简单,无法结合位移坐标分析抓斗的运行偏差,并进行实时校正,影响了定位的精准度;其三,现有抓斗定位方法无法结合运行轨迹进行预仿真模拟,同时对仿真出的干涉碰撞进行预警,降低了抓斗运行时的安全性。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一,提出了一种基于连续半自动状态下的抓斗定位方法及系统。
2、本发明的技术方案是这样实现的:本发明公开了一种基于连续半自动状态下的抓斗定位方法,包括如下步骤:
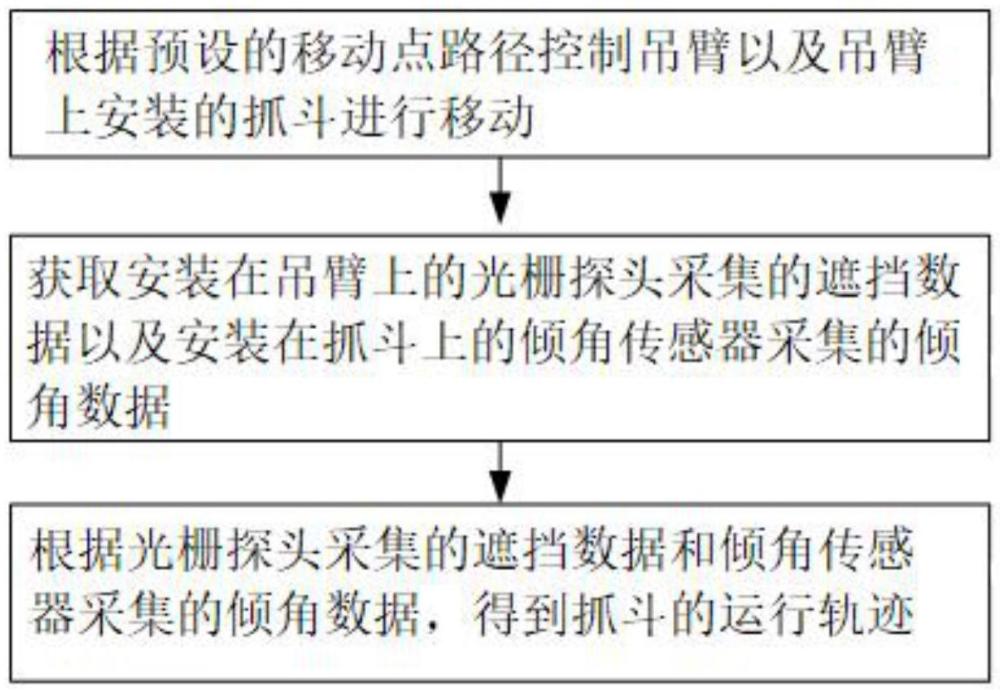
3、根据预设的移动点路径控制吊臂以及吊臂上安装的抓斗进行移动;
4、获取安装在吊臂上的光栅探头采集的遮挡数据以及安装在抓斗上的倾角传感器采集的倾角数据;
5、根据光栅探头采集的遮挡数据和倾角传感器采集的倾角数据,得到抓斗的运行轨迹。
6、进一步地,当手动操控抓斗移动时,获取安装在吊臂上的光栅探头采集的遮挡数据以及安装在抓斗上的倾角传感器采集的倾角数据,根据光栅探头采集的遮挡数据和倾角传感器采集的倾角数据得到抓斗的运行轨迹,形成预设的移动点路径。
7、进一步地,根据光栅探头采集的遮挡数据和倾角传感器采集的倾角数据,得到抓斗的运行轨迹,具体包括:分析光栅探头的遮挡数据,得到光栅探头的点位,将点位位置标记为抓斗的位置,根据倾角传感器的数据来分析抓斗底部夹爪的翻转状态,结合抓斗连续的位置和夹爪的翻转状态来模拟抓斗的连续位置和动作状态,来模拟抓斗的轨迹。
8、进一步地,本发明的基于连续半自动状态下的抓斗定位方法还包括如下步骤:
9、建立坐标系,获得抓斗起点位置的空间坐标,当抓斗由移动点路径的返回停留点运行至起始点位时,根据光栅探头采集的遮挡数据判断抓斗的实际位置,将抓斗的实际位置与抓斗起点位置的空间坐标进行对比,确定偏移的矢量方向及偏移的距离,根据对比分析确定的矢量方向及偏移的距离生成对应的三轴矢量位移量,形成归位的反向点位路径,并控制吊臂在动作复位后执行反向点位路径,回到抓斗起点位置。
10、进一步地,本发明的基于连续半自动状态下的抓斗定位方法还包括如下步骤:获取监测相机采集的抓斗的运动范围内的影像数据,根据影像数据对抓斗的运动范围环境进行建模,得到三维模型;
11、在建立的三维模型中建立坐标系,将抓斗的运行轨迹添加到三维模型中,建立基于环境坐标的整合移动模型;
12、将预设的移动点路径添加到整合移动模型中,根据光栅探头采集的遮挡数据和倾角传感器采集的倾角数据对抓斗的运行轨迹进行预仿真,得到预仿真的运动轨迹,当预仿真的运动轨迹出现异常时向监测终端发出警告信号。
13、进一步地,当预仿真的运动轨迹与三维模型中的目标发生物理干涉时,判定预仿真的运动轨迹出现异常;
14、当预仿真的运动轨迹与预设的移动点路径的偏差超出设定范围时,判定预仿真的运动轨迹出现异常。
15、进一步地,根据影像数据对抓斗的运动范围环境进行建模,具体包括:首先对影像进行降噪处理,接着进行边缘处理,随后对多个监测相机的影像进行拼接整合,整合后建立全景图像,同时对全景图像中的目标进行特征分析,之后根据目标特征建立关于影像的三维模型。
16、进一步地,空间直角坐标系的原点为预设的移动点路径开端。
17、本发明还公开了一种基于连续半自动状态下的抓斗定位系统,包括安装在吊臂上的光栅探头以及安装在抓斗上的倾角传感器,抓斗安装在吊臂上,所述吊臂和抓斗与电控箱电连接,所述电控箱与监测终端连接,所述电控箱用于控制吊臂与抓斗进行移动,所述光栅探头用于采集遮挡数据,并传递给监测终端,所述倾角传感器用于采集倾角数据,并传递给监测终端,所述监测终端用于根据光栅探头采集的遮挡数据和倾角传感器采集的倾角数据,得到抓斗的运行轨迹。
18、进一步地,本发明的基于连续半自动状态下的抓斗定位系统还包括用于对抓斗的运动范围进行监测的监测相机,所述监测相机用于获取抓斗的运动范围内的影像数据,并传递给监测主机,所述监测主机用于根据影像数据对抓斗的运动范围环境进行建模,得到三维模型,并在建立的三维模型中建立坐标系,将抓斗的运行轨迹添加到三维模型中,建立基于环境坐标的整合移动模型;
19、所述监测主机还用于将预设的移动点路径添加到整合移动模型中,并根据光栅探头采集的遮挡数据和倾角传感器采集的倾角数据对抓斗的运行轨迹进行预仿真,得到预仿真的运动轨迹,当预仿真的运动轨迹出现异常时向监测终端发出警告信号。
20、进一步地,监测相机为多个,多个监测相机之间各重叠60°的覆盖角度,且抓斗运行范围位于监测相机组成的监测范围内部。
21、与现有技术相比,本发明具有以下有益效果:本发明公开了一种基于连续半自动状态下的抓斗定位方法,通过分析光栅探头的点位来模拟抓斗位置,同时采集抓斗上的倾角传感器检测的倾角数据,对抓斗的翻转运动进行检测,随后进行整合完成抓斗位置以及抓斗夹爪状态的整体轨迹,优化了传统的单点定位方式,满足了用户的个性化需求,提高了定位实用性;通过边缘检测与运行轨迹结合判定夹爪的行进偏差,随后根据偏差值对抓斗的轨迹进行自动校正,实时调整模拟的计算偏差,保障了定位的精准度;通过将预设的动作点位添加到基于环境坐标的整合移动模型中进行预仿真,对仿真出的干涉碰撞进行预警,提高了抓斗运行时的安全性。
技术特征:
1.一种基于连续半自动状态下的抓斗定位方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于连续半自动状态下的抓斗定位方法,其特征在于:根据光栅探头采集的遮挡数据和倾角传感器采集的倾角数据,得到抓斗的运行轨迹,具体包括:分析光栅探头的遮挡数据,得到光栅探头的点位,将点位位置标记为抓斗的位置,根据倾角传感器的数据来分析抓斗底部夹爪的翻转状态,结合抓斗连续的位置和夹爪的翻转状态来模拟抓斗的连续位置和动作状态,来模拟抓斗的轨迹。
3.根据权利要求1所述的基于连续半自动状态下的抓斗定位方法,其特征在于:还包括如下步骤:
4.根据权利要求1所述的基于连续半自动状态下的抓斗定位方法,其特征在于:还包括如下步骤:获取监测相机采集的抓斗的运动范围内的影像数据,根据影像数据对抓斗的运动范围环境进行建模,得到三维模型;
5.根据权利要求4所述的基于连续半自动状态下的抓斗定位方法,其特征在于:当预仿真的运动轨迹与三维模型中的目标发生物理干涉时,判定预仿真的运动轨迹出现异常;
6.根据权利要求4所述的基于连续半自动状态下的抓斗定位方法,其特征在于:根据影像数据对抓斗的运动范围环境进行建模,具体包括:首先对影像进行降噪处理,接着进行边缘处理,随后对多个监测相机的影像进行拼接整合,整合后建立全景图像,同时对全景图像中的目标进行特征分析,之后根据目标特征建立关于影像的三维模型。
7.根据权利要求3或4所述的基于连续半自动状态下的抓斗定位方法,其特征在于:空间直角坐标系的原点为预设的移动点路径开端。
8.一种基于连续半自动状态下的抓斗定位系统,其特征在于:包括安装在吊臂上的光栅探头以及安装在抓斗上的倾角传感器,抓斗安装在吊臂上,所述吊臂和抓斗与电控箱电连接,所述电控箱与监测终端连接,所述电控箱用于控制吊臂与抓斗进行移动,所述光栅探头用于采集遮挡数据,并传递给监测终端,所述倾角传感器用于采集倾角数据,并传递给监测终端,所述监测终端用于根据光栅探头采集的遮挡数据和倾角传感器采集的倾角数据,得到抓斗的运行轨迹。
9.根据权利要求8所述的基于连续半自动状态下的抓斗定位系统,其特征在于:还包括用于对抓斗的运动范围进行监测的监测相机,所述监测相机用于获取抓斗的运动范围内的影像数据,并传递给监测主机,所述监测主机用于根据影像数据对抓斗的运动范围环境进行建模,得到三维模型,并在建立的三维模型中建立坐标系,将抓斗的运行轨迹添加到三维模型中,建立基于环境坐标的整合移动模型;
10.根据权利要求9所述的基于连续半自动状态下的抓斗定位系统,其特征在于:监测相机为多个,多个监测相机之间各重叠60°的覆盖角度,且抓斗运行范围位于监测相机组成的监测范围内部。
技术总结
本发明公开了一种基于连续半自动状态下的抓斗定位方法及系统,该基于连续半自动状态下的抓斗定位方法包括如下步骤:根据预设的移动点路径控制吊臂以及吊臂上安装的抓斗进行移动;获取安装在吊臂上的光栅探头采集的遮挡数据以及安装在抓斗上的倾角传感器采集的倾角数据,根据光栅探头采集的遮挡数据和倾角传感器采集的倾角数据,得到抓斗的运行轨迹。本发明优化了传统的单点定位方式,满足了用户的个性化需求,提高了定位实用性,并通过将预设的动作点位添加到基于环境坐标的整合移动模型中进行预仿真,对仿真出的干涉碰撞进行预警,提高了抓斗运行时的安全性。
技术研发人员:蒋子怿,高帮国,陈瑜,喻可,沈帆
受保护的技术使用者:宝信软件(武汉)有限公司
技术研发日:
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!