一种采血管直立进管的系统的制作方法
本申请涉及医用设备领域,更具体的说,是涉及一种采血管直立进管的系统。
背景技术:
1、在传统的采血流程中,在抽血开始之前,需要仔细核对患者信息,确认无误后设备生成标签,再由人工将标签手动贴在空试管上,接着进行人工抽血,完成后把抽完血的试管放置在相应的试管盒(通常为泡沫盒)上。这种传统采血方式依赖人工长时间进行机械式的重复操作,劳动强度极大,工作效率颇为低下。针对这一状况,目前采用了智能采血贴标机,该机器能够依据医务人员核对的信息,自动为空试管贴上标签,实时准备好带有标签的空试管,一定程度上减轻了医务人员贴标签的工作负担。
2、然而,现有的智能采血贴标机在采血管传输过程中,缺乏有效的支撑和固定装置,导致采血管在传输过程中无法保持直立状态,此外,尽管上述现有智能采血贴标机在一定程度上减轻了医务人员的部分工作量,但仍需要人工去取用试管,并手持试管进行采血操作,操作麻烦,采血效率不高。
3、如何设计一种自动使采血管直立进管的系统,以实现采血管全自动备管、全自动直立输送,是需要关注的问题。
技术实现思路
1、鉴于上述问题,本申请提供了一种采血管直立进管的系统,以实现采血管全自动备管、全自动直立输送。
2、为了实现上述目的,现提出具体方案如下:
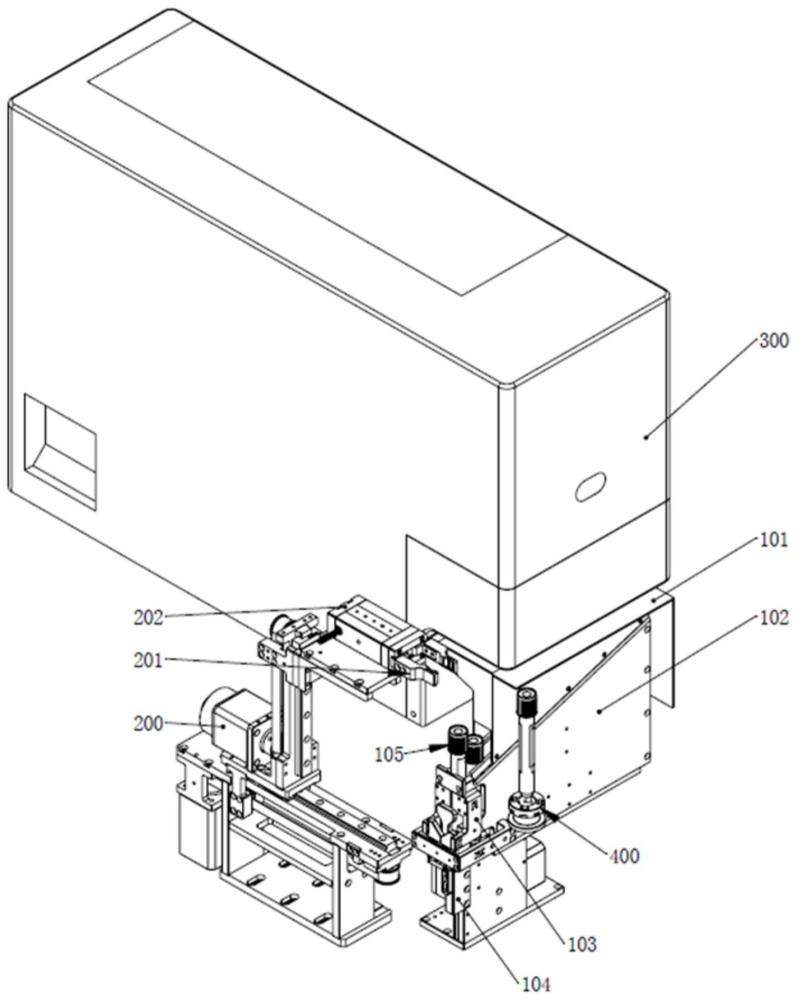
3、一种采血管直立进管的系统,包括接料漏斗(101)、与所述接料漏斗(101)连接的试管滑道(102)、顶升模块、在所述顶升模块上固定连接的试管定位装置(103)、三轴夹爪机构(200)、智能采血贴标机(300)和皮带线载具(400);
4、所述智能采血贴标机(300),用于对空试管贴上标签;
5、所述接料漏斗(101),用于接收已贴上标签的所述空试管;
6、所述试管滑道(102),用于供所述空试管滑落至所述顶升模块;
7、所述顶升模块,用于配合所述试管定位装置(103)将所述空试管定位,并将所述空试管顶升至所述三轴夹爪机构(200);
8、所述三轴夹爪机构(200),用于将所述空试管送至所述皮带线载具(400);
9、所述皮带线载具(400),用于直立装载所述空试管,并输送至采血工位。
10、可选的,所述顶升模块包括顶升装置(104)、顶升电机(106)、顶升主动轮(107)、与所述顶升装置(104)连接的顶升皮带(108),以及顶升直线导轨(109);
11、所述顶升电机(106),用于驱动所述顶升主动轮(107)转动;
12、所述顶升主动轮(107)上挂有所述顶升皮带(108),以当所述顶升主动轮(107)转动时,所述顶升皮带(108)带动所述顶升装置(104)上升;
13、所述顶升装置(104)上安装有y型顶升块(1040),以当所述顶升装置(104)上升时,带动所述y型顶升块(1040)上顶。
14、可选的,所述试管定位装置(103)包括第一试管定位块(1031)、第二试管定位块(1032)、第一转接块(1033),第二转接块(1034)、第一滑块(1035)、第二滑块(1036)、拉簧(1037)、第一随动器(1038)和第二随动器(1039);
15、所述第一随动器(1038)与所述第一转接块(1033)连接,所述第一转接块(1033)与所述第一试管定位块(1031)连接,所述第一转接块(1033)安装在所述第一滑块(1035)上;
16、所述第二随动器(1039)与所述第二转接块(1034)连接,所述第二转接块(1034)与所述第二试管定位块(1032)连接,所述第二转接块(1034)安装在所述第二滑块(1036)上;
17、所述第一转接块(1033)通过所述拉簧(1037)与所述第二转接块(1034)连接。
18、可选的,所述三轴夹爪机构(200)包括夹爪(201)、平行夹紧电爪(202)、x轴电机(203)、x轴主动轮(204)、x轴皮带(205)、x轴直线导轨(206)、z轴电机(207)、z轴主动轮(208)、z轴皮带(209)和z轴直线导轨(210);
19、所述平行夹紧电爪(202),用于驱动所述夹爪(201)将所述空试管夹紧,并将所述空试管送至目标位置;
20、所述x轴电机(203),用于驱动所述x轴主动轮(204)转动;
21、所述x轴主动轮(204)上挂有所述x轴皮带(205),以当所述x轴主动轮(204)转动时,所述x轴皮带(205)带动在所述x轴皮带(205)上的空试管沿所述x轴直线导轨(206)的方向运动;
22、所述z轴电机(207),用于驱动所述z轴主动轮(208)转动;
23、所述z轴主动轮(208)上挂有所述z轴皮带(209),以当所述z轴主动轮(208)转动时,所述z轴皮带(209)带动在所述z轴皮带(209)上的空试管沿所述z轴直线导轨(210)的方向运动。
24、可选的,所述试管滑道(102)包括接料钣金(1021)、滑道右边板(1022)和滑道左边板(1023),以使所述空试管滑落时不掉落出所述系统。
25、借由上述技术方案,本申请的采血管直立进管的系统包括接料漏斗、与接料漏斗连接的试管滑道、顶升模块、在顶升模块上固定连接的试管定位装置、在试管定位装置上定位的试管、三轴夹爪机构、智能采血贴标机和皮带线载具,智能采血贴标机对空试管贴上标签,接料漏斗接收已贴上标签的空试管,试管滑道供空试管滑落至顶升模块,顶升模块配合试管定位装置将空试管定位,并将空试管顶升至三轴夹爪机构,三轴夹爪机构将空试管送至皮带线载具,皮带线载具直立装载空试管,并输送至采血工位。由此可见,该采血管直立进管的系统能够对试管进行定位,并进行直立输送,并由皮带线载具送至采血工位,实现采血管全自动备管以及全自动直立输送。
技术特征:
1.一种采血管直立进管的系统,其特征在于,包括接料漏斗(101)、与所述接料漏斗(101)连接的试管滑道(102)、顶升模块、在所述顶升模块上固定连接的试管定位装置(103)、三轴夹爪机构(200)、智能采血贴标机(300)和皮带线载具(400);
2.根据权利要求1所述的系统,其特征在于,所述顶升模块包括顶升装置(104)、顶升电机(106)、顶升主动轮(107)、与所述顶升装置(104)连接的顶升皮带(108),以及顶升直线导轨(109);
3.根据权利要求1所述的系统,其特征在于,所述试管定位装置(103)包括第一试管定位块(1031)、第二试管定位块(1032)、第一转接块(1033),第二转接块(1034)、第一滑块(1035)、第二滑块(1036)、拉簧(1037)、第一随动器(1038)和第二随动器(1039);
4.根据权利要求1所述的系统,其特征在于,所述三轴夹爪机构(200)包括夹爪(201)、平行夹紧电爪(202)、x轴电机(203)、x轴主动轮(204)、x轴皮带(205)、x轴直线导轨(206)、z轴电机(207)、z轴主动轮(208)、z轴皮带(209)和z轴直线导轨(210);
5.根据权利要求1所述的系统,其特征在于,所述试管滑道(102)包括接料钣金(1021)、滑道右边板(1022)和滑道左边板(1023),以使所述空试管滑落时不掉落出所述系统。
技术总结
本申请公开了一种采血管直立进管的系统,包括接料漏斗、与接料漏斗连接的试管滑道、顶升模块、在顶升模块上固定连接的试管定位装置、在试管定位装置上定位的试管、三轴夹爪机构、智能采血贴标机和皮带线载具,智能采血贴标机对空试管贴上标签,接料漏斗接收已贴上标签的空试管,试管滑道供空试管滑落至顶升模块,顶升模块配合试管定位装置将空试管定位,并将空试管顶升至三轴夹爪机构,三轴夹爪机构将空试管送至皮带线载具,皮带线载具直立装载空试管,并输送至采血工位。由此可见,该采血管直立进管的系统能够对试管进行定位,并进行直立输送,并由皮带线载具送至采血工位,实现采血管全自动备管以及全自动直立输送。
技术研发人员:黄江峰,郭荣忠,刘正阳,符兴利
受保护的技术使用者:阳普医疗科技股份有限公司
技术研发日:
技术公布日:2024/12/10
- 还没有人留言评论。精彩留言会获得点赞!