仓储系统的制作方法
本申请涉及物料仓储物流,尤其涉及一种仓储系统。
背景技术:
1、仓储系统主要用于物料的存储及出入库管理,通过不同工作单元相互配合实现料箱及物料交接、转移。
2、现有技术的仓储系统通常需要库存区设置进行拣选出库和装箱入库作业的工作台,通过运输机器人将料箱从货架搬运到工作台,操作人员或机器人在工作台上对料箱进行物料的取放作业,针对如何将料箱由运输机器人交接到工作台,现有技术通常采用在运输机器人底部设置举升装置或在工作台设置夹持机构来实现,上述两种方案都存在料箱的搬运速度慢,且搬运过程料箱不稳定的问题;首先,举升装置在举升的过程中使运输机器人的重心升高,举升速度过快或料箱重量较大的情况下,料箱及运输机器人容易倾倒;其次,采用夹持机构需要等待夹持动作完成后才能够进行高度方向上的搬运,交接时间也较长,容易出现运输机器人在工作台排队而造成拥堵,而仓储系统的出入库流程往往因为单点堵塞而降低整个系统的工作效率。
3、因此,设计一种高速稳定运行的仓储系统十分必要。
技术实现思路
1、本申请旨在一定程度上解决相关技术中的技术问题之一。为此,本申请提供了一种能够高效、稳定运行的仓储系统。
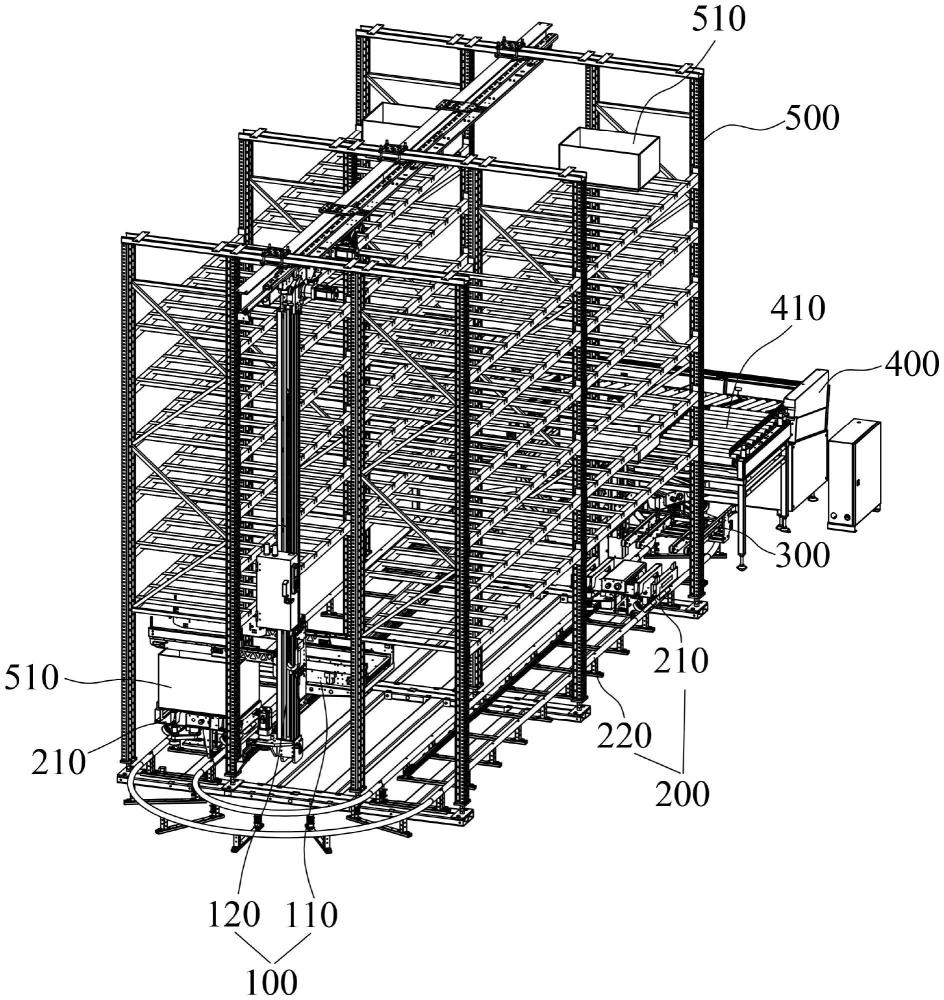
2、为了达到上述目的,本申请采用如下技术方案:一种仓储系统,其特征在于,包括货架、料箱存取单元、运输单元、交接单元和操作台,所述货架设置有用于存放料箱的若干存储位,所述料箱用于存储货物;
3、所述料箱存取单元用于从所述货架的料箱存储位取出料箱并交接至运输单元,以及从所述运输单元取下料箱并存入所述货架的料箱存储位;
4、所述运输单元用于在所述货架和所述交接单元之间运输所述料箱,所述运输单元包括轨道和移动底盘,所述移动底盘设置在轨道上并能够沿所述轨道运动;
5、所述操作台包括能够将料箱移入或移出操作台输入输出单元,所述输入输出单元对接设置有交接单元;
6、所述交接单元能够将料箱从所述运输单元移出并交接至所述操作台的输入输出单元,以及能够从所述操作台的输入输出单元接取料箱并交接至所述运输单元,所述交接单元包括承载组件和提升组件,所述承载组件用于承载料箱,所述提升组件用于驱动所述承载组件在与运输单元对接的第一位置和与所述操作台对接的第二位置之间往复运动。
7、本技术方案中,料箱存取单元从货架的料箱存储位上将料箱取出并交接给运输单元;运输单元将料箱运输到操作台的输入输出单元;通过在操作台的输入输出单元的输入输出端上设置交接单元,使运输单元上承载的料箱能够通过交接单元转移到操作台上,并且在操作台对料箱进行操作后,操作台能够在输入输出单元将料箱交接给运输单元,并由运输单元运送并交接给料箱存取单元,料箱存取单元再将料箱送回货架的原存储位中。通过各作业单元的配合实现物料的出入库,通过交接单元完成料箱从运输单元到操作台以及操作台到运输单元的交接,料箱交接过程稳定、高速,减少了运输单元在操作台的出输入单元的拥堵。
8、优选的,所述移动底盘上设置有用于承载所述料箱的承载面,所述承载面上设置有若干接驳槽;
9、所述承载组件设为齿状货叉,所述齿状货叉包括若干插齿,在所述运输单元和所述交接单元的承载组件对接于第一位置的情况下,所述插齿插入所述接驳槽内。
10、优选的,所述插齿包括驱动轮和传送带,所述驱动轮驱动所述传送带运动,所述传送带用于承载料箱并驱动料箱移动,在所述交接单元的承载组件与所述输入输出单元对接于第二位置的情况下,所述传送带驱动所述料箱移动到所述输入输出单元上。
11、优选的,所述轨道穿过所述货架底部,所述移动底盘沿轨道运动至货架底部的情况下,所述料箱存取单元能够与所述移动底盘对接并完成料箱的交接。
12、优选的,所述轨道设为环形轨道。
13、优选的,所述交接单元包括第一交接单元和第二交接单元,所述输入输出单元包括分别用于将料箱移入和移出操作台的输入单元和输出单元,所述第一交接单元的承载组件与所述操作台对接于第二位置的情况下,所述运输单元的移动底盘能够沿所述轨道从操作台的输入单元移动到输出单元并与所述第二交接单元的承载组件进行料箱交接。
14、优选的,所述料箱存取单元包括执行组件、立柱和水平导轨,所述执行组件用于搬运料箱,所述立柱滑动连接所述水平导轨并能够沿水平导轨在水平方向移动,所述执行组件滑动连接所述立柱并能够沿所述立柱在竖直方向移动。
15、优选的,所述水平导轨和所述货架固定连接。
16、优选的,所述执行组件包括托板和机械臂,所述托板用于承载料箱,所述机械臂用于将料箱移入或移出所述托板。
17、优选的,所述机械臂包括位于所述托板两侧的第一机械臂和第二机械臂,所述机械臂设为能够进行伸缩运动的伸缩臂,所述机械臂两端转动连接有阻挡件,所述阻挡件能够在相对所述机械臂转动的情况下形成第一状态和第二状态,所述阻挡件相对所述机械臂形成第一状态的情况下,所述第一机械臂和第二机械臂能够沿所述料箱两侧相对所述料箱运动,所述阻挡件相对所述机械臂形成第二状态的情况下,所述阻挡片能够与所述料箱抵接,所述第一机械臂和第二机械臂能够带动所述料箱移动。
18、本申请的这些特点和优点将会在下面的具体实施方式以及附图中进行详细的揭露。本申请最佳的实施方式或手段将结合附图来详尽表现,但并非是对本申请技术方案的限制。另外,在每个下文和附图中出现的这些特征、要素和组件是具有多个,并且为了表示方便而标记了不同的符号或数字,但均表示相同或相似构造或功能的部件。
技术特征:
1.一种仓储系统,其特征在于,包括货架(500)、料箱存取单元(100)、运输单元(200)、交接单元(300)和操作台(400),所述货架(500)设置有用于存放料箱(510)的若干存储位,所述料箱(510)用于存储货物;
2.根据权利要求1所述的仓储系统,其特征在于,所述移动底盘(210)上设置有用于承载所述料箱(510)的承载面,所述承载面上设置有若干接驳槽(211);
3.根据权利要求2所述的仓储系统,其特征在于,所述插齿(311)包括驱动轮(3112)和传送带(3111),所述驱动轮(3112)驱动所述传送带(3111)运动,所述传送带(3111)用于承载料箱(510)并驱动料箱(510)移动,在所述交接单元(300)的承载组件(310)与所述输入输出单元(410)对接于第二位置的情况下,所述传送带(3111)驱动所述料箱(510)移动到所述输入输出单元(410)上。
4.根据权利要求2所述的仓储系统,其特征在于,所述轨道(220)穿过所述货架(500)底部,所述移动底盘(210)沿轨道(220)运动至货架(500)底部的情况下,所述料箱存取单元(100)能够与所述移动底盘(210)对接并完成料箱(510)的交接。
5.根据权利要求4所述的仓储系统,其特征在于,所述轨道(220)设为环形轨道(220)。
6.根据权利要求2所述的仓储系统,其特征在于,所述交接单元(300)包括第一交接单元和第二交接单元,所述输入输出单元(410)包括分别用于将料箱(510)移入和移出操作台(400)的输入单元和输出单元,所述第一交接单元的承载组件(310)与所述操作台(400)对接于第二位置的情况下,所述运输单元(200)的移动底盘(210)能够沿所述轨道(220)从操作台(400)的输入单元移动到输出单元并与所述第二交接单元的承载组件(310)进行料箱(510)交接。
7.根据权利要求1至6中任一项所述的仓储系统,其特征在于,所述料箱存取单元(100)包括执行组件(110)、立柱(120)和水平导轨(130),所述执行组件(110)用于搬运料箱(510),所述立柱(120)滑动连接所述水平导轨(130)并能够沿水平导轨(130)在水平方向移动,所述执行组件(110)滑动连接所述立柱(120)并能够沿所述立柱(120)在竖直方向移动。
8.根据权利要求7所述的仓储系统,其特征在于,所述水平导轨(130)和所述货架(500)固定连接。
9.根据权利要求7所述的仓储系统,其特征在于,所述执行组件(110)包括托板(1101)和机械臂(1102),所述托板(1101)用于承载料箱(510),所述机械臂(1102)用于将料箱(510)移入或移出所述托板(1101)。
10.根据权利要求9所述的仓储系统,其特征在于,所述机械臂(1102)包括位于所述托板(1101)两侧的第一机械臂和第二机械臂,所述机械臂(1102)设为能够进行伸缩运动的伸缩臂,所述机械臂(1102)两端转动连接有阻挡件(1103),所述阻挡件(1103)能够在相对所述机械臂(1102)转动的情况下形成第一状态和第二状态,所述阻挡件(1103)相对所述机械臂(1102)形成第一状态的情况下,所述第一机械臂和第二机械臂能够沿所述料箱(510)两侧相对所述料箱(510)运动,所述阻挡件(1103)相对所述机械臂(1102)形成第二状态的情况下,所述阻挡片能够与所述料箱(510)抵接,所述第一机械臂和第二机械臂能够带动所述料箱(510)移动。
技术总结
本发明公开了一种仓储系统,包括货架、料箱存取单元、运输单元、交接单元和操作台,货架设置有用于存放料箱的若干存储位;料箱存取单元用于从货架的料箱存储位取出料箱并交接至运输单元,以及从运输单元取下料箱并存入货架的料箱存储位;运输单元用于在货架和交接单元之间运输料箱;所述操作台包括能够将料箱移入或移出操作台输入输出单元,所述输入输出单元对接设置有交接单元;交接单元能够将料箱从运输单元移出并交接至输入输出单元,以及能够从输入输出单元接取料箱并交接至运输单元。通过交接单元完成料箱从运输单元到操作台以及操作台到运输单元的交接,减少了运输单元在操作台的出输入单元的拥堵。
技术研发人员:朱俊达,高彦飞,张世飞,张正勇,邹正
受保护的技术使用者:浙江慧仓智能科技有限公司
技术研发日:
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!