一种RGV动力车精准控制系统和方法与流程
本发明涉及rgv动力车控制系统,具体是一种rgv动力车精准控制系统和方法。
背景技术:
1、轨道搬运车(rgv),有手动和自动模式组成。手动可通过遥控器进行前后行走。自动又自开发的调度系统下发目标工位,车辆接收到对应信号,自动前往,中间自动减速、停车到达,并且装有雷达检测。现有的rgv动力车在进行控制时,匹配有专用的控制系统,现有的控制系统对于rgv动力车进行多工位控制运行的控制精准度较差,对此人们进行了大量的研究。
技术实现思路
1、本发明所要解决的技术问题是提供一种rgv动力车精准控制系统和方法,其能够解决上述现在技术中的问题。
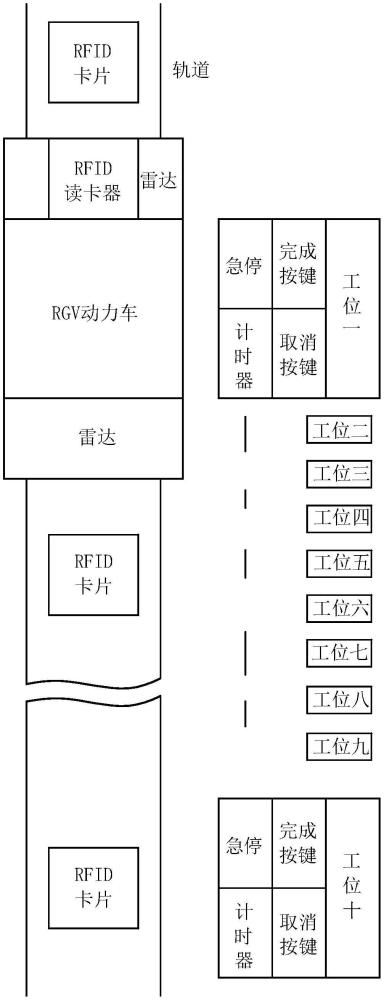
2、本发明是通过以下技术方案来实现的:本发明的一种rgv动力车精准控制系统,包括轨道,轨道上设置有多个rgv动力车,还包括多个工位,其特征在于,轨道之间设置有多个排列的rfid卡片,所述rgv动力车上设置有rfid读卡器,所述rfid读卡器用于读取所述rfid卡片信息,所述rgv动力车按照单台模式、自由节拍模式和强制节拍模式运行实现rgv动力车在不同工位之间进行移动。
3、有益地,其中,工位设置的数量与rgv动力车设置的数量相同。
4、有益地,其中,rgv动力车四周设置有雷达。
5、有益地,其中,工位上设置有立柱,包含完成按键、取消按键、急停、计时器。
6、有益地,其中,倒计时期间,按下急停按钮,系统停止倒计时,再次点击可以恢复,正计时期间无效。
7、有益地,其中,计时器在强制节拍下系统倒计时开始计时,时间同步每个工位上的计时器;自由节拍下系统正计时开始。
8、有益地,其中,单台模式,可指定某一台车下发目标工位,然后车辆接收到以后自动行走,减速、停车到达目标工位,完成指令。
9、有益地,其中,自由节拍,现场有9个工位中,正计时开始,操作人员完成工作后点击完成按键、正计时结束;等到10个工位全部完成,系统开始对在线的每一台车辆下发下一个目标工位;车辆自动前进并到达后停止;等待下一轮人工操作并完成的循环。
10、有益地,其中,强制节拍,给每个工位上面计时器发送倒计时,倒计时时长可设置,倒计时结束后,系统开始对在线的每一台车辆下发下一个目标工位;车辆自动前进并到达后停止;然后计时器重新倒计时,开始循环。
11、一种rgv动力车精准控制系统的运行方法,包括rfid卡片,rfid卡片用于存储工位信息;
12、第一步,当前工位>目标工位,车辆后退;当前工位<目标工位,车辆前进;
13、第二步,行驶过程中,当前工位=目标工位+1,车辆开始减速,当前工位=目标工位,车辆到达停止。
14、进一步的技术方案,
15、本发明的有益效果是:一、该系统通过设置了强制模式、自由节拍模式和单台模式能够对多个或者单个的rgv动力车进行控制运行,效率较高。
16、二、通过在地面上设置了多个rfid卡片,并且将rfid卡片信息来存储工位信息,利用rgv小车上的rfid卡片读取器读取rfid卡片,以反馈rgv小车的位置信息,利用该位置信息,可以使系统能够对单台或者多台rgv小车进行精准控制。
17、三、通过比对rfid卡片上与目标工位之间的工位代表数值大小,可以在要达到工位之前对rgv小车进行提前的减速并且停止,并且利用比对数值大小的方式来控制rgv小车的前进或者后退,极大的提高了控制精准度。
技术特征:
1.一种rgv动力车精准控制系统,包括轨道,轨道上设置有多个rgv动力车,还包括多个工位,其特征在于,轨道之间设置有多个排列的rfid卡片,所述rgv动力车上设置有rfid读卡器,所述rfid读卡器用于读取所述rfid卡片信息,所述rgv动力车按照单台模式、自由节拍模式和强制节拍模式运行实现rgv动力车在不同工位之间进行移动。
2.根据权利要求1所述的一种rgv动力车精准控制系统,其特征在于:工位设置的数量与rgv动力车设置的数量相同。
3.根据权利要求1所述的一种rgv动力车精准控制系统,其特征在于:rgv动力车四周设置有雷达。
4.根据权利要求1所述的一种rgv动力车精准控制系统,其特征在于:工位上设置有立柱,立柱包含完成按键、取消按键、急停、计时器。
5.根据权利要求4所述的一种rgv动力车精准控制系统,其特征在于:倒计时期间,按下急停按钮,系统停止倒计时,再次点击可以恢复,正计时期间无效。
6.根据权利要求5所述的一种rgv动力车精准控制系统,其特征在于:计时器在强制节拍下系统倒计时开始计时,时间同步每个工位上的计时器;自由节拍下系统正计时开始。
7.根据权利要求6所述的一种rgv动力车精准控制系统,其特征在于:单台模式,可指定某一台车下发目标工位,然后车辆接收到以后自动行走,减速、停车到达目标工位,完成指令。
8.根据权利要求6所述的一种rgv动力车精准控制系统,其特征在于:自由节拍,现场有多个工位中,正计时开始,操作人员完成工作后点击完成按键、正计时结束;等到所有工位全部完成,系统开始对在线的每一台车辆下发下一个目标工位;车辆自动前进并到达后停止;等待下一轮人工操作并完成的循环。
9.根据权利要求6所述的一种rgv动力车精准控制系统,其特征在于:强制节拍,给每个工位上面计时器发送倒计时,倒计时时长可设置,倒计时结束后,系统开始对在线的每一台车辆下发下一个目标工位;车辆自动前进并到达后停止;然后计时器重新倒计时,开始循环。
10.一种利用如权利要求1-9其中任意一项所述的一种rgv动力车精准控制系统的工作方法,其特征在于:包括rfid卡片,rfid卡片用于存储工位信息;第一步,当前工位>目标工位,车辆后退;当前工位<目标工位,车辆前进;第二步,行驶过程中,当前工位=目标工位+1,车辆开始减速,当前工位=目标工位,车辆到达停止。
技术总结
本发明公开了一种RGV动力车精准控制系统和方法,包括轨道,轨道上设置有多个RGV动力车,还包括多个工位,其特征在于,轨道之间设置有多个排列的RFID卡片,所述RGV动力车上设置有RFID读卡器,所述RFID读卡器用于读取所述RFID卡片信息,所述RGV动力车按照单台模式、自由节拍模式和强制节拍模式运行实现RGV动力车在不同工位之间进行移动,通过在地面上设置了多个RFID卡片,并且将RFID卡片信息来存储工位信息,利用RGV小车上的RFID卡片读取器读取RFID卡片,以反馈RGV小车的位置信息,利用该位置信息,可以使系统能够对单台或者多台RGV小车进行精准控制。
技术研发人员:孙国忠,王福豪,张彦振,杨建伟,叶阳光,孙伟凯
受保护的技术使用者:杭州豪盛电动车辆有限公司
技术研发日:
技术公布日:2024/12/23
- 还没有人留言评论。精彩留言会获得点赞!