一种车载集装箱的货物装载方法及系统与流程
本发明属于货物装载,特别是一种车载集装箱的货物装载方法及系统。
背景技术:
1、现阶段,由于集装箱的封闭特性,在人工装车场景下,需要人工将车辆停放至装车口,并在装车口与车厢尾部放置钢板以供叉车行驶,然后由人工驾驶叉车逐个向集装箱内装货。在此过程中,需要大量人工进行车辆和货物的对齐工作,人工驾驶叉车逐个放置货物需要消耗大量的人力和时间。在半自动化场景下,需要人工将车辆停放在装车平台的对接口,然后人工量取集装箱内部尺寸,记录信息后设置装车平台货物堆叠方式,然后手动操作装车平台移动以完成装车平台和集装箱的对接,然后手动启动货物放置程序。这个过程非常依赖人工经验,误操作风险较大。这成为急需解决的技术问题。
技术实现思路
1、本发明的目的是提供一种车载集装箱的货物装载方法及系统,以解决现有技术中的不足,它通过设计了一种针对于利用车载集装箱形式的整车装车平台的视觉引导系统,实现全自动集装箱装车,极大减少人工依赖,提高装车的效率、准确性和安全性。
2、本申请的一个实施例提供了一种车载集装箱的货物装载方法,应用于自动装车平台,所述方法包括:
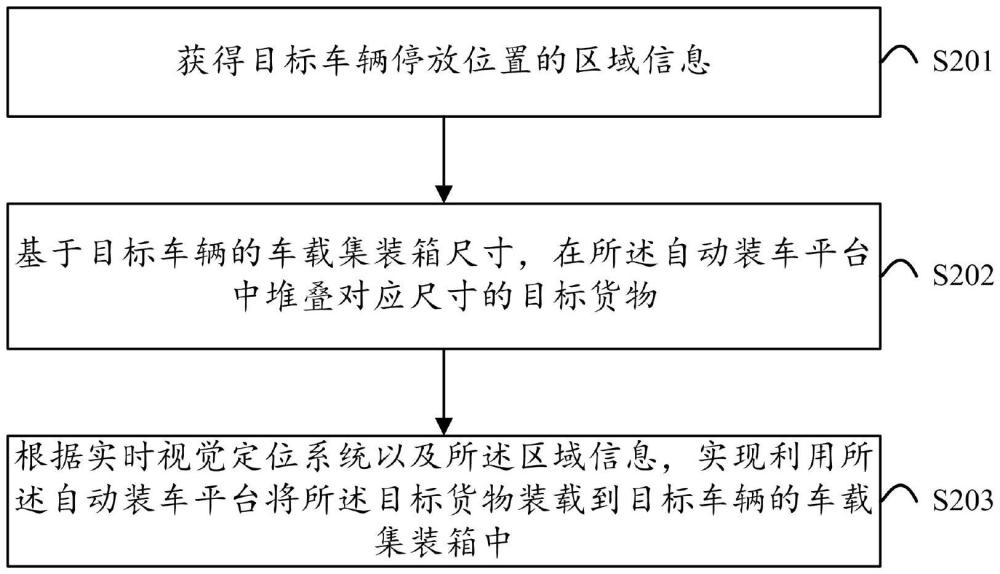
3、获得目标车辆停放位置的区域信息;
4、基于目标车辆的车载集装箱尺寸,在所述自动装车平台中堆叠对应尺寸的目标货物;
5、根据实时视觉定位系统以及所述区域信息,实现利用所述自动装车平台将所述目标货物装载到目标车辆的车载集装箱中。
6、可选的,所述自动装车平台在xyz三个轴向上具有平移功能,且在yz两个轴向具有旋转功能。
7、可选的,所述自动装车平台的前后侧均包括三轴移动机构;所述三轴移动机构用于沿xyz轴进行预设范围内的平移,以实现自动装车平台与车载集装箱的对齐。
8、可选的,所述实时视觉定位系统至少包括两台3d相机,且所述两台3d相机分别安装在自动装车平台同一端的两侧,且满足车载集装箱尾部的销孔分别在所述两台3d相机的视野内。
9、可选的,所述实时视觉定位系统的3d相机用于对车载集装箱尾部的销孔进行检测与定位,并计算所述销孔相对于所述3d相机的三维坐标。
10、可选的,所述对车载集装箱尾部的销孔进行检测与定位,包括:
11、利用预设yolo算法,执行对销孔的目标检测,得到包含销孔的矩形框;
12、依照所述矩形框,裁剪销孔对应的yolo区域;
13、利用模板匹配算法,在所述yolo区域中执行模板匹配得到定位框,以实现对车载集装箱尾部的销孔进行检测与定位。
14、可选的,所述对车载集装箱尾部的销孔进行检测与定位之后,所述方法还包括:
15、利用预设算法执行所述自动装车平台与所述车载集装箱的角度、高度以及偏移量对齐。
16、本申请的又一实施例提供了一种车载集装箱的货物装载系统,应用于自动装车平台,所述系统包括:
17、获得模块,用于获得目标车辆停放位置的区域信息;
18、堆叠模块,用于基于目标车辆的车载集装箱尺寸,在所述自动装车平台中堆叠对应尺寸的目标货物;
19、实现模块,用于根据实时视觉定位系统以及所述区域信息,实现利用所述自动装车平台将所述目标货物装载到目标车辆的车载集装箱中。
20、本申请的又一实施例提供了一种存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时实现上述任一项所述的方法。
21、本申请的又一实施例提供了一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以实现上述任一项所述的方法。
22、与现有技术相比,本发明首先获得目标车辆停放位置的区域信息;然后基于目标车辆的车载集装箱尺寸,在所述自动装车平台中堆叠对应尺寸的目标货物;最后根据实时视觉定位系统以及所述区域信息,实现利用所述自动装车平台将所述目标货物装载到目标车辆的车载集装箱中。它通过设计了一种针对于利用车载集装箱形式的整车装车平台的视觉引导系统,实现全自动集装箱装车,极大减少人工依赖,提高装车的效率、准确性和安全性。
技术特征:
1.一种车载集装箱的货物装载方法,应用于自动装车平台,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述自动装车平台在xyz三个轴向上具有平移功能,且在yz两个轴向具有旋转功能。
3.根据权利要求2所述的方法,其特征在于,所述自动装车平台的前后侧均包括三轴移动机构;所述三轴移动机构用于沿xyz轴进行预设范围内的平移,以实现自动装车平台与车载集装箱的对齐。
4.根据权利要求3所述的方法,其特征在于,所述实时视觉定位系统至少包括两台3d相机,且所述两台3d相机分别安装在自动装车平台同一端的两侧,且满足车载集装箱尾部的销孔分别在所述两台3d相机的视野内。
5.根据权利要求4所述的方法,其特征在于,所述实时视觉定位系统的3d相机用于对车载集装箱尾部的销孔进行检测与定位,并计算所述销孔相对于所述3d相机的三维坐标。
6.根据权利要求5所述的方法,其特征在于,所述对车载集装箱尾部的销孔进行检测与定位,包括:
7.根据权利要求6所述的方法,其特征在于,所述对车载集装箱尾部的销孔进行检测与定位之后,所述方法还包括:
8.一种车载集装箱的货物装载系统,应用于自动装车平台,其特征在于,所述系统包括:
9.一种存储介质,其特征在于,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时实现所述权利要求1至7中任一项所述的方法。
10.一种电子设备,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以实现所述权利要求1至7中任一项所述的方法。
技术总结
本发明公开了一种车载集装箱的货物装载方法及系统,方法包括:首先获得目标车辆停放位置的区域信息;然后基于目标车辆的车载集装箱尺寸,在所述自动装车平台中堆叠对应尺寸的目标货物;最后根据实时视觉定位系统以及所述区域信息,实现利用所述自动装车平台将所述目标货物装载到目标车辆的车载集装箱中。它通过设计了一种针对于利用车载集装箱形式的整车装车平台的视觉引导系统,实现全自动集装箱装车,极大减少人工依赖,提高装车的效率、准确性和安全性。
技术研发人员:詹鹏飞,高龙飞,王俊石,张树房,周德强,娄兵兵
受保护的技术使用者:华晟(青岛)智能装备科技有限公司
技术研发日:
技术公布日:2025/4/7
- 还没有人留言评论。精彩留言会获得点赞!