一种散粮气力输送系统的控制方法及装置、电子设备与流程
本发明涉及散粮气力输送,具体涉及一种散粮气力输送系统的控制方法及装置、电子设备。
背景技术:
1、散粮气力输送系统是一种利用气流的能量,在密闭管道内沿气流方向输送颗粒状散粮的系统。其基本原理是使用压缩空气作为输送介质,利用气流的压力和速度,通过管道将散粮从一处移动到另一处。在输送过程中,气流将物料悬浮并推动其前进,实现连续、均匀的输送,适用于水平、垂直或倾斜方向的输送。系统主要由供料装置、输送管道、气源装置和卸料装置等组成。
2、为了减少散粮颗粒在气力输送过程中产生的破碎,现有散粮气力输送系统主要是通过pid控制来调节风机频率和阀门开度,从而调节气力输送系统中的气流速率、压力等变量,来实现对散粮颗粒输送过程的控制。具体来说,pid控制器通过对系统的误差(即实际气流中的散粮速度和设定值之间的差异)进行反馈调整,通过比例、积分和微分三个控制作用,通过改变风机频率调节进气量、调节阀门开度调节进料量试图稳定气流的速度和压力,从而避免散粮颗粒的过度撞击或受到过大气流力而引起破碎。
3、然而,现有pid控制方法在解决散粮颗粒破碎问题时存在以下局限性:一是在散粮气力输送系统中,散粮颗粒的行为和气流之间的相互作用具有高度的非线性,且随着系统状态的变化而时刻变化。pid控制器无法准确捕捉这种非线性和时变效应,只能根据系统的误差进行线性调节,这使得其在处理气流与散粮颗粒之间复杂的相互作用时效果有限。二是在散粮气力输送系统中,气流的速度、压力和散粮颗粒的流动状态是相互耦合的多输入多输出(mimo)系统。pid控制对于这种耦合效应的处理不够充分,因为它通常是针对单一变量进行调整,缺乏全局优化和耦合效应的综合考虑。
技术实现思路
1、本发明旨在解决现有散粮气力输送系统的控制方案降低散粮破碎率的效果较差的问题,提出一种散粮气力输送系统的控制方法及装置、电子设备。
2、本发明解决上述技术问题所采用的技术方案是:
3、第一方面,本发明提供一种散粮气力输送系统的控制方法,所述方法包括:
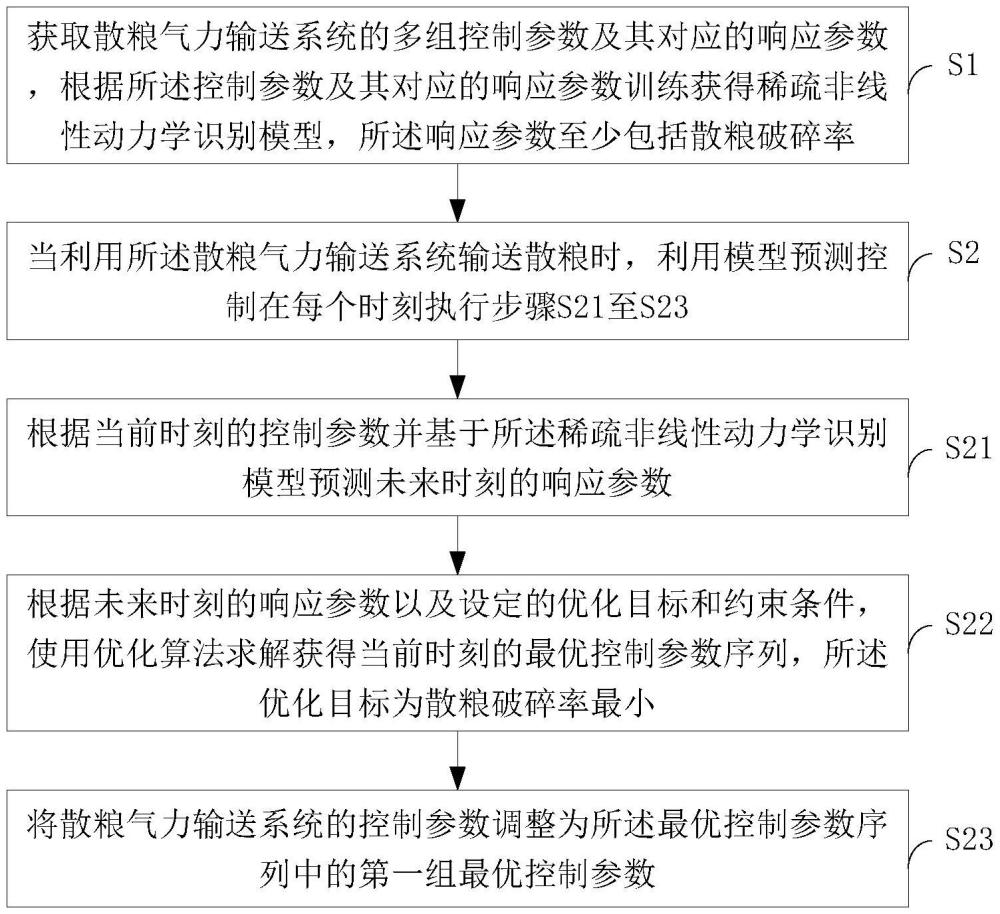
4、s1、获取散粮气力输送系统的多组控制参数及其对应的响应参数,根据所述控制参数及其对应的响应参数训练获得稀疏非线性动力学识别模型,所述响应参数至少包括散粮破碎率;
5、s2、当利用所述散粮气力输送系统输送散粮时,利用模型预测控制在每个时刻执行以下操作:
6、s21、根据当前时刻的控制参数并基于所述稀疏非线性动力学识别模型预测未来时刻的响应参数;
7、s22、根据未来时刻的响应参数以及设定的优化目标和约束条件,使用优化算法求解获得当前时刻的最优控制参数序列,所述优化目标为散粮破碎率最小;
8、s23、将散粮气力输送系统的控制参数调整为所述最优控制参数序列中的第一组最优控制参数。
9、进一步地,所述控制参数包括散粮气力输送系统的风机频率和阀门开度;
10、所述约束条件包括散粮气力输送系统的风机频率可变范围和阀门开度可变范围。
11、进一步地,所述控制参数还包括环境温度和环境湿度;
12、所述约束条件还包括散粮气力输送系统的环境温度可变范围和环境湿度可变范围。
13、进一步地,所述响应参数还包括散粮颗粒的动量参数、输送管道的压降、管道中散粮颗粒的密度,所述动量参数包括速度和加速度。
14、进一步地,根据所述控制参数及其对应的响应参数训练获得稀疏非线性动力学识别模型,包括:
15、将控制参数作为输入数据,将对应的响应参数作为输出数据,构建训练数据集,根据所述训练数据集对稀疏非线性动力学识别模型进行训练,直至稀疏非线性动力学识别模型收敛。
16、进一步地,所述方法还包括:
17、定期使用验证数据集确定稀疏非线性动力学识别模型的误差,并判断所述误差是否大于预设误差,若是,则重新训练稀疏非线性动力学识别模型。
18、第二方面,本发明提供一种散粮气力输送系统的控制装置,所述装置包括:
19、训练单元,用于获取散粮气力输送系统的多组控制参数及其对应的响应参数,根据所述控制参数及其对应的响应参数训练获得稀疏非线性动力学识别模型,所述响应参数至少包括散粮破碎率;
20、模型预测控制单元,用于当利用所述散粮气力输送系统输送散粮时,在每个时刻,根据当前时刻的控制参数并基于所述稀疏非线性动力学识别模型预测未来时刻的响应参数;以及根据未来时刻的响应参数以及设定的优化目标和约束条件,使用优化算法求解获得当前时刻的最优控制参数序列,所述优化目标为散粮破碎率最小;
21、参数调整单元,用于将散粮气力输送系统的控制参数调整为所述最优控制参数序列中的第一组最优控制参数。
22、第三方面,本发明提供一种电子设备,其特征在于,所述电子设备包括处理器、存储器和通信总线;
23、所述通信总线用于实现处理器和存储器之间的连接通信;
24、所述处理器用于执行存储器中的一个或者多个程序,以实现如第一方面所述的散粮气力输送系统的控制方法的步骤。
25、本发明的有益效果是:本发明提供的散粮气力输送系统的控制方法及装置、电子设备,基于sindy-mpc(sparse identification of nonlinear dynamics for modelpredictive control)对散粮气力输送系统进行滚动预测和滚动优化,即在每个时刻,模型预测控制(mpc)基于稀疏非线性动力学识别模型(sindyc)预测未来时刻散粮气力输送系统的响应参数,根据预测结果并以散粮破碎率最小为优化目标求解控制参数,进而利用求解的控制参数对散粮气力输送系统进行优化控制。sindy-mpc能够捕捉复杂的非线性动态,在多输入多输出条件下能够保持高效的控制性能,并且能实时适应不同工况,从而提升控制的响应速度和系统鲁棒性。通过精确的模型预测控制,实现了散粮气力输送系统控制参数的精确优化,显著降低了气力输送过程中的散粮破碎率。
技术特征:
1.一种散粮气力输送系统的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的散粮气力输送系统的控制方法,其特征在于,所述控制参数包括散粮气力输送系统的风机频率和阀门开度;
3.根据权利要求2所述的散粮气力输送系统的控制方法,其特征在于,所述控制参数还包括环境温度和环境湿度;
4.根据权利要求1所述的散粮气力输送系统的控制方法,其特征在于,所述响应参数还包括散粮颗粒的动量参数、输送管道的压降、管道中散粮颗粒的密度,所述动量参数包括速度和加速度。
5.根据权利要求1所述的散粮气力输送系统的控制方法,其特征在于,根据所述控制参数及其对应的响应参数训练获得稀疏非线性动力学识别模型,包括:
6.根据权利要求1所述的散粮气力输送系统的控制方法,其特征在于,所述方法还包括:
7.一种散粮气力输送系统的控制装置,其特征在于,所述装置包括:
8.一种电子设备,其特征在于,所述电子设备包括处理器、存储器和通信总线;
技术总结
本发明涉及散粮气力输送技术领域,公开了一种散粮气力输送系统的控制方法及装置、电子设备,旨在解决现有控制方案降低散粮破碎率的效果较差的问题,方案主要包括:根据散粮气力输送系统的控制参数及其对应的响应参数训练稀疏非线性动力学识别模型,响应参数至少包括散粮破碎率;当利用散粮气力输送系统输送散粮时,利用模型预测控制在每个时刻,基于稀疏非线性动力学识别模型预测未来时刻的响应参数;使用优化算法求解获得当前时刻的最优控制参数序列,优化目标为散粮破碎率最小;将散粮气力输送系统的控制参数调整为最优控制参数序列中的第一组最优控制参数。本发明提高了控制精度,显著降低了气力输送过程中的散粮破碎率。适用于散粮输送。
技术研发人员:黄波,罗鑫皓,付迁,杨杰,高洪晨,毛根武,邱家志,唐文强,董德良,李晓亮,贺波,李炜,杨波
受保护的技术使用者:中储粮成都储藏研究院有限公司
技术研发日:
技术公布日:2025/3/20
- 还没有人留言评论。精彩留言会获得点赞!