一种智能仓储物流机器人的制作方法
本技术涉及仓储机器人,具体为一种智能仓储物流机器人。
背景技术:
1、仓储物流机器人是在物流仓储和生产仓库等室内环境中,用于货物出入库搬运、分拣、拣选等操作的机器人,主要包括各类agv(自动导引小车)、amr(自主移动机器人)、协作机器人机械臂等,其中amr(自主移动机器人)应用较为广泛,其一般为盒形车体,其具备升降顶起货物或者货架,以实现对小件货物进行智能化自动转运。
2、但是现有技术中自主移动机器人顶部为平面,用于放置货物,并带动其移动实现物流运输,在仓库内转运,而其运输时主要依靠货物重量与机器人顶部平面产生摩擦力,其稳定性不佳,并且也会限制机器人的移动效率,速度过快货物则可能会掉落。
技术实现思路
1、针对背景技术中存在的问题,本实用新型的目的在于提供一种智能仓储物流机器人,可实现对货物夹持稳定,移动速度更快,转运效率更高的优点。
2、为解决上述问题,本实用新型采用如下的技术方案;
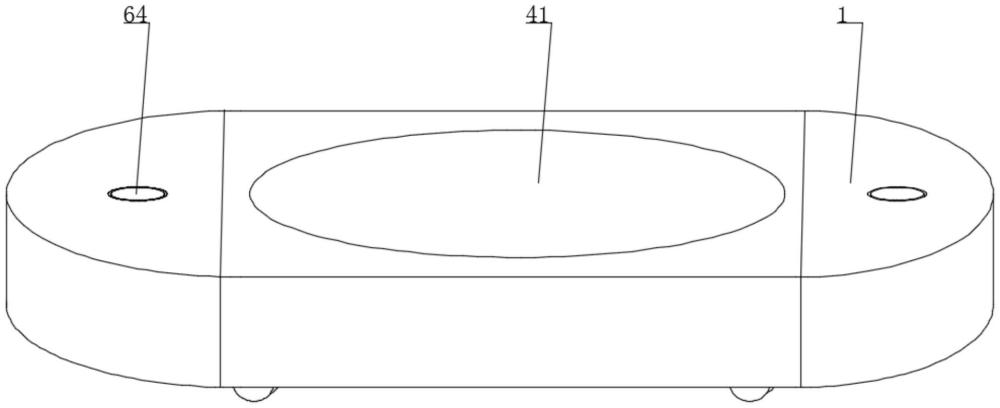
3、一种智能仓储物流机器人,包括壳体,所述壳体的底部安装有四个万向驱动轮,所述壳体的内部安装有控制器主体,所述壳体的内部安装有升降机构,所述壳体的两侧延展部,所述延展部的内部安装有夹紧机构。
4、作为上述技术方案的进一步描述:所述升降机构包括载物台、两个电动推杆、推板和两个支杆,所述载物台的底部卡接至壳体的顶部,所述载物台的底部与两个支杆固定连接,所述支杆的底端与推板固定连接,所述电动推杆的底部固定连接至壳体的内部,所述电动推杆的活动端与推板固定连接。
5、作为上述技术方案的进一步描述:所述壳体的内部安装有两个辅助伸缩杆,所述伸缩杆的顶端与载物台固定连接,所述伸缩杆的底端插接至推板的底部并与壳体固定连接。
6、作为上述技术方案的进一步描述:所述载物台的顶部面设置有防滑垫。
7、作为上述技术方案的进一步描述:所述夹紧机构包括气缸、铰接板、弧形杆和夹块,所述气缸固定安装至壳体的内部,所述铰接板的顶部铰接至壳体的内部,所述气缸的活动端与铰接板滑动连接,所述铰接板的另一侧与弧形杆固定连接,所述弧形杆的另一端与夹块铰接。
8、作为上述技术方案的进一步描述:所述壳体上开设有契合槽,所述契合槽的内部设置有内搭环,所述夹块位于契合槽的内部,所述夹块的底部与内搭环接触。
9、相比于现有技术,本实用新型的优点在于:
10、本方案通过夹紧机构可实现对货物夹持稳定,从而实现了装置具备高效稳定,便于提高移动速度,提高效率的优点。
技术特征:
1.一种智能仓储物流机器人,包括壳体(1),其特征在于:所述壳体(1)的底部安装有四个万向驱动轮(2),所述壳体(1)的内部安装有控制器主体(3),所述壳体(1)的内部安装有升降机构(4),所述壳体(1)的两侧延展部(5),所述延展部(5)的内部安装有夹紧机构(6);
2.根据权利要求1所述的一种智能仓储物流机器人,其特征在于:所述载物台(41)的底部与两个支杆(44)固定连接,所述支杆(44)的底端与推板(43)固定连接,所述电动推杆(42)的底部固定连接至壳体(1)的内部,所述电动推杆(42)的活动端与推板(43)固定连接。
3.根据权利要求2所述的一种智能仓储物流机器人,其特征在于:所述壳体(1)的内部安装有两个辅助伸缩杆(7),所述伸缩杆(7)的顶端与载物台(41)固定连接,所述伸缩杆(7)的底端插接至推板(43)的底部并与壳体(1)固定连接。
4.根据权利要求2所述的一种智能仓储物流机器人,其特征在于:所述载物台(41)的顶部面设置有防滑垫(411)。
5.根据权利要求1所述的一种智能仓储物流机器人,其特征在于:所述铰接板(62)的顶部铰接至壳体(1)的内部,所述气缸(61)的活动端与铰接板(62)滑动连接,所述铰接板(62)的另一侧与弧形杆(63)固定连接,所述弧形杆(63)的另一端与夹块(64)铰接。
6.根据权利要求5所述的一种智能仓储物流机器人,其特征在于:所述壳体(1)上开设有契合槽(8),所述契合槽(8)的内部设置有内搭环(81),所述夹块(64)位于契合槽(8)的内部,所述夹块(64)的底部与内搭环(81)接触。
技术总结
本技术公开了一种智能仓储物流机器人,包括壳体,所述壳体的底部安装有四个万向驱动轮,所述壳体的内部安装有控制器主体,所述壳体的内部安装有升降机构,所述壳体的两侧延展部,所述延展部的内部安装有夹紧机构。该技术通过壳体作为装置主体,通过控制器主体配合万向驱动轮实现智能化移动物流,先将货物放置在壳体的顶部升降机构上,然后移动至存放位置,并通过启动升降机构将货物升起,便于取下,同时在移动过程中,启动两个夹紧机构从两侧对货物进行辅助稳定,以保证在壳体移动的过程中,保持稳定避免掉落,从而实现了装置具备高效稳定,便于提高移动速度,提高效率的优点。
技术研发人员:高广志,李洪涛,张达凯
受保护的技术使用者:三河迈威森精密机械设备有限公司
技术研发日:20240103
技术公布日:2024/9/29
- 还没有人留言评论。精彩留言会获得点赞!