一种制动夹钳自动转运抓具的制作方法
本技术涉及轨道交通设备维修,具体而言,涉及一种制动夹钳自动转运抓具。
背景技术:
1、在现有轨道交通设备维修领域,制动夹钳的夹取与转运抓具主要由人工辅助装夹、控制与机器调运方式实现,其具体过程为作业人员首先张开抓具,将抓具夹持在制动缸两侧,然后用电葫芦吊起抓具一端,将抓具提起,抓具在提升的过程中下方的爪子收紧,并将制动夹钳提起。随后,作业人员推动吊起的制动夹钳,并转移至分解工位,现有制动夹钳抓取与转运作业的特点是全程需要作业人员参与控制,且效率较低。
技术实现思路
1、本实用新型的目的在于提供一种制动夹钳自动转运抓具,以改善上述问题。为了实现上述目的,本实用新型采取的技术方案如下:
2、本申请提供了一种制动夹钳自动转运抓具,所述制动夹钳自动转运抓具包括:固定架、固定装置以及转运装置;所述固定装置设置在所述固定架的中部,所述固定装置与所述固定架的顶部固定连接;所述转运装置设置在所述固定架的底部,所述转运装置包括第一转运装置和第二转运装置,所述第一转运装置和所述第二转运装置分别设置在所述固定架的两侧,所述第一转运装置和所述第二转运装置相对设置,所述第一转运装置和所述第二转运装置用于夹持制动夹钳。
3、可选的,所述固定架包括第一支撑梁、第二支撑梁、第一安装板和第二安装板,所述第一支撑梁与所述第二支撑梁相对设置,所述第一支撑梁与所述第二支撑梁均垂直于地面设置,所述第一安装板和所述第二安装板分别设置在所述第一支撑梁的两端,所述第一安装板的两端分别与所述第一支撑梁和所述第二支撑梁固定连接,所述第二安装板的两端分别与所述第一支撑梁和所述第二支撑梁固定连接。
4、可选的,所述第一支撑梁与所述第二支撑梁之间的间隙设置有定位板,所述定位板的两端分别于所述第一支撑梁和所述第二支撑梁固定连接,所述定位板上设置有定位孔。
5、可选的,所述第一转运装置包括第一气动组件、第一夹爪安装板以及第一夹爪装置,所述第一气动组件用于驱动所述第一夹爪安装板动作,所述第一夹爪安装板设置在所述固定架的底部,所述第一夹爪装置与所述第一夹爪安装板固定连接。
6、可选的,所述第一夹爪装置包括第一固定板、第一固定柱组和第二固定柱组,所述第一固定板与所述第一夹爪安装板固定连接,所述第一固定柱组和所述第二固定柱组对称设置在所述第一固定板的两侧,所述第一固定柱组和所述第二固定柱组之间的间距大于制动夹钳的宽度。
7、可选的,所述第一固定柱组包括两个第一固定柱,两个所述第一固定柱沿所述第一固定板的宽度方向设置。
8、可选的,所述第二转运装置包括第二气动组件、第二夹爪安装板以及第二夹爪装置,所述第二气动组件用于驱动所述第二夹爪安装板动作,所述第二夹爪安装板设置在所述固定架的底部,所述第二夹爪装置与所述第二夹爪安装板固定连接。
9、可选的,所述第二夹爪装置包括第二固定板、第二固定柱以及第三固定柱,所述第二固定板与所述第二夹爪安装板固定连接,所述第二固定柱和所述第三固定柱设置在所述第二夹爪安装板的下部,所述第二固定柱与所述第三固定柱间隔设置,所述第二固定柱和所述第三固定柱沿所述第二夹爪安装板的长度方向设置。
10、可选的,所述固定架上设置有电磁阀,所述电磁阀用于控制第一转运装置中的第一气缸和第二转运装置中的第二气缸的动作方向。
11、可选的,所述固定架上设置有三通接管,所述三通接管的三个接口分别与所述第一气缸、所述第二气缸和所述电磁阀连接。
12、本实用新型的有益效果为:
13、本实用新型通过在固定架的顶部设置固定装置和在固定架的底部设置转运装置,实现了与机械臂配合完成制动夹钳的自动化抓取与转运,使制动夹钳的转运过程无需投入人工,同时为检修的自动化、智能化提供了可行的技术方案,极大的提高了生产效率。
14、本实用新型的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本实用新型实施例了解。本实用新型的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种制动夹钳自动转运抓具,其特征在于,包括:
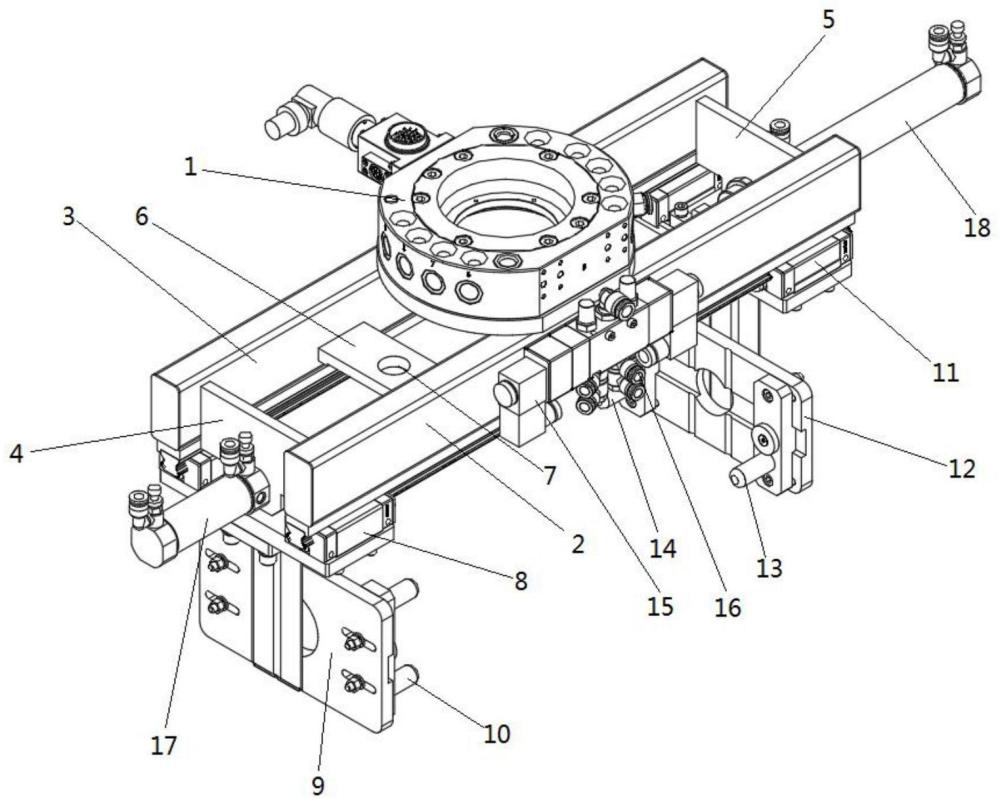
2.根据权利要求1所述的制动夹钳自动转运抓具,其特征在于:所述固定架包括第一支撑梁(2)、第二支撑梁(3)、第一安装板(4)和第二安装板(5),所述第一支撑梁(2)与所述第二支撑梁(3)相对设置,所述第一支撑梁(2)与所述第二支撑梁(3)均垂直于地面设置,所述第一安装板(4)和所述第二安装板(5)分别设置在所述第一支撑梁(2)的两端,所述第一安装板(4)的两端分别与所述第一支撑梁(2)和所述第二支撑梁(3)固定连接,所述第二安装板(5)的两端分别与所述第一支撑梁(2)和所述第二支撑梁(3)固定连接。
3.根据权利要求2所述的制动夹钳自动转运抓具,其特征在于:所述第一支撑梁(2)与所述第二支撑梁(3)之间的间隙设置有定位板(6),所述定位板(6)的两端分别于所述第一支撑梁(2)和所述第二支撑梁(3)固定连接,所述定位板(6)上设置有定位孔(7)。
4.根据权利要求1所述的制动夹钳自动转运抓具,其特征在于:所述第一转运装置包括第一气动组件、第一夹爪安装板(8)以及第一夹爪装置,所述第一气动组件用于驱动所述第一夹爪安装板(8)动作,所述第一夹爪安装板(8)设置在所述固定架的底部,所述第一夹爪装置与所述第一夹爪安装板(8)固定连接。
5.根据权利要求4所述的制动夹钳自动转运抓具,其特征在于:所述第一夹爪装置包括第一固定板(9)、第一固定柱组和第二固定柱组,所述第一固定板(9)与所述第一夹爪安装板(8)固定连接,所述第一固定柱组和所述第二固定柱组对称设置在所述第一固定板(9)的两侧,所述第一固定柱组和所述第二固定柱组之间的间距大于制动夹钳的宽度。
6.根据权利要求5所述的制动夹钳自动转运抓具,其特征在于:所述第一固定柱组包括两个第一固定柱(10),两个所述第一固定柱(10)沿所述第一固定板(9)的宽度方向设置。
7.根据权利要求1所述的制动夹钳自动转运抓具,其特征在于:所述第二转运装置包括第二气动组件、第二夹爪安装板(11)以及第二夹爪装置,所述第二气动组件用于驱动所述第二夹爪安装板(11)动作,所述第二夹爪安装板(11)设置在所述固定架的底部,所述第二夹爪装置与所述第二夹爪安装板(11)固定连接。
8.根据权利要求7所述的制动夹钳自动转运抓具,其特征在于:所述第二夹爪装置包括第二固定板(12)、第二固定柱(13)以及第三固定柱(14),所述第二固定板(12)与所述第二夹爪安装板(11)固定连接,所述第二固定柱(13)和所述第三固定柱(14)设置在所述第二夹爪安装板(11)的下部,所述第二固定柱(13)与所述第三固定柱(14)间隔设置,所述第二固定柱(13)和所述第三固定柱(14)沿所述第二夹爪安装板(11)的长度方向设置。
9.根据权利要求1所述的制动夹钳自动转运抓具,其特征在于:所述固定架上设置有电磁阀(15),所述电磁阀(15)用于控制第一转运装置中的第一气缸(17)和第二转运装置中的第二气缸(18)的动作方向。
10.根据权利要求9所述的制动夹钳自动转运抓具,其特征在于:所述固定架上设置有三通接管(16),所述三通接管(16)的三个接口分别与所述第一气缸(17)、所述第二气缸(18)和所述电磁阀(15)连接。
技术总结
本技术涉及轨道交通设备维修技术领域,涉及一种制动夹钳自动转运抓具,所述制动夹钳自动转运抓具包括固定架、固定装置以及转运装置;固定装置设置在固定架的中部,固定装置与固定架的顶部固定连接;转运装置设置在固定架的底部,转运装置包括第一转运装置和第二转运装置,第一转运装置和第二转运装置分别设置在固定架的两侧,第一转运装置和第二转运装置相对设置,第一转运装置和所述第二转运装置用于夹持制动夹钳,本技术实现了与机械臂配合完成制动夹钳的自动化抓取与转运,使制动夹钳的转运过程无需投入人工,同时为检修的自动化、智能化提供了可行的技术方案,极大的提高了生产效率。
技术研发人员:何勇,林耀,吴迪,尉雪玲,冯乐乐,张亮,赵春明,欧涛,邓增良,王昌亮,闫丽东
受保护的技术使用者:中铁工程设计咨询集团有限公司
技术研发日:20240124
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!