电池模组的转运设备和转运系统的制作方法
本申请涉及电池,尤其涉及一种电池模组的转运设备和转运系统。
背景技术:
1、电池单体广泛用于电子设备,例如手机、笔记本电脑、电瓶车、电动汽车、电动飞机、电动轮船、电动玩具汽车、电动玩具轮船、电动玩具飞机和电动工具等等。电池单体可以包括镉镍电池单体、氢镍电池单体、锂离子电池单体和二次碱性锌锰电池单体等。
2、电池模组由多个电池单体组成,目前,电池模组在不同工位间的转运,人力劳动成本高,成为亟需解决的问题。
技术实现思路
1、本申请实施例提供了一种电池模组的转运设备和转运系统,其能提高电池的生产效率。
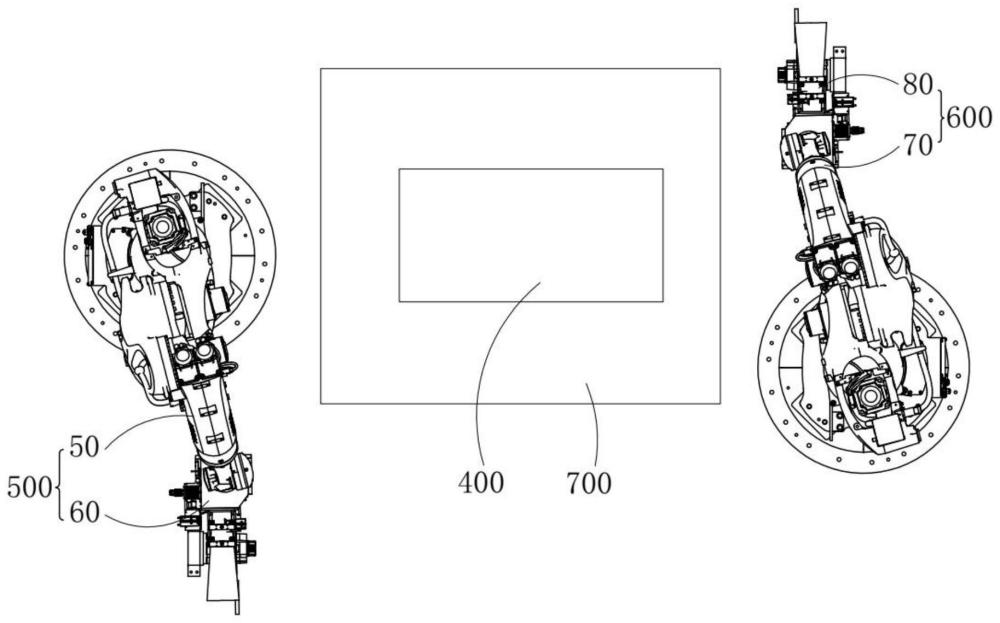
2、第一方面,本申请实施例提供了一种电池模组的转运设备,包括上料装置和下料装置,上料装置包括上料机器人以及与上料机器人连接的上料抓取结构,上料装置用于将待焊接的电池模组搬运至焊接工位;下料装置包括下料机器人以及与下料机器人连接的下料抓取结构,下料装置用于将位于焊接工位焊接完成的电池模组搬运至下一工位。
3、上述方案中,通过将上料抓取结构安装在上料机器人,上料抓取机构抓取待焊接的电池模组,再通过上料机器人的移动,实现将待焊接的电池模组搬运至焊接工位。电池模组焊接完成后,通过安装在下料机器人的下料抓取结构抓取焊接完成的电池模组,再通过下料机器人将焊接完成的电池模组搬运至下一工位,提升了电池模组生产线的自动化程度,降低了人力劳动成本。
4、在一些实施例中,上料抓取结构包括第一抓取组件和第二抓取组件,第一抓取组件用于抓取单排的电池模组,第二抓取组件用于抓取双排的电池模组。
5、上述方案中,当需要抓取单排的电池模组时,将第一抓取组件安装至上料机器人;当需要抓取双排的电池模组时,将第二抓取组件安装至上料机器人,实现单排和双排的电池模组上料的兼容。
6、在一些实施例中,第一抓取组件包括第一支架和两个第一夹板,第一支架用于与上料机器人连接;两个第一夹板分别沿第一方向滑动连接于第一支架,用于沿第一方向夹持电池模组的侧板;其中,第一方向为电池模组的宽度方向。
7、上述方案中,通过两个第一夹板可以沿电池模组的宽度方向将电池模组夹持,而且第一夹板可沿第一方向相对第一支架滑动,从而能夹持不同宽度的电池模组,提高第一抓取组件的兼容性。
8、在一些实施例中,第一抓取组件还包括两个第一夹爪,两个第一夹爪分别沿第二方向滑动连接于第一支架,用于沿第二方向夹持电池模组的端板;其中,第二方向为电池模组的长度方向。
9、上述方案中,通过两个第一夹爪可以沿电池模组的长度方向将电池模组夹持,而且第一夹爪可沿第二方向相对第二支架滑动,从而能够夹持不同长度的电池模组,提高第一抓取组件的兼容性。
10、在一些实施例中,第一抓取组件还包括侧板夹持件,侧板夹持件包括夹块驱动件和两个第一夹块,两个第一夹块与夹块驱动件连接,夹块驱动件用于驱动两个第一夹块互相靠拢或远离,以使电池模组的侧板被夹持在两个第一夹块之间。
11、上述方案中,通过将电池模组的侧板夹持在两个第一夹块的中间,可在一定程度上防止侧板掉落,提高第一抓取组件的抓取可靠性。
12、在一些实施例中,第二抓取组件包括第二支架和第二夹板,第二支架用于与上料机器人连接;第二夹板包括依次沿第一方向滑动连接于第二支架的第一子板、第二子板、第三子板和第四子板,第一子板与第二子板用于沿第一方向夹持第一排的电池模组的侧板,第三子板与第四子板用于沿第一方向夹持第二排的电池模组的侧板;其中,第一方向为电池模组的宽度方向。
13、上述方案中,通过第一子板和第二子板夹取第一排的电池模组,通过第三子板和第四子板夹取第二排的电池模组,实现双排电池模组的搬运。而且第一子板和第二子板之间的宽度,以及可调节第三子板与第四子板之间的宽度,从而适应不同宽度的双排电池模组,提高第二抓取组件的兼容性。
14、在一些实施例中,第二抓取组件还包括四个第二夹爪,其中两个第二夹爪沿第二方向滑动连接于第二支架,用于沿第二方向夹持第一排的电池模组的端板;另两个第二夹爪沿第二方向滑动连接于第二支架,用于沿第二方向夹持第二排的电池模组的端板;其中,第二方向为电池模组的长度方向。
15、上述方案中,通过四个第二夹爪可以同时夹持第一排的电池模组和第二排的电池模组,而且两个第二夹爪之间的宽度可以调节,从而适应不同长度的双排电池模组,提高第二抓取组件的兼容性。
16、在一些实施例中,第二抓取组件还包括中隔板夹持件,第二子板朝向第三子板的一侧以及第三子板朝向第二子板的一侧均设置有中隔板夹持件,中隔板夹持件用于夹持位于第一排的电池模组和第二排的电池模组之间的中隔板。
17、上述方案中,中隔板夹持件可以夹持双排电池模组用于绝缘的中隔板,从而进一步提高了第二抓取组件的抓取可靠性。
18、在一些实施例中,下料抓取结构包括第三支架和两个第三夹板,第三支架用于与下料机器人连接;两个第三夹板分别沿第一方向滑动连接于第三支架,用于沿第一方向夹持单排或者双排的电池模组的侧板;其中,第一方向为电池模组的宽度方向。
19、上述方案中,下料抓手既能抓取焊接完成的单排电池模组,又能抓取焊接完成的双排电池模,提高了下料抓取结构的兼容性。
20、在一些实施例中,下料抓取结构还包括两个第三夹爪,两个第三夹爪分别沿第二方向滑动连接于第三支架,用于沿第二方向夹持单排或者双排的电池模组的端板;其中,第二方向为电池模组的长度方向。
21、上述方案中,通过第三夹爪与第三夹板的配合,能够将电池模组的侧板以及端板均能夹持,提高了下料抓取结构的抓取稳定性。
22、第二方面,本申请实施例还提供了一种转运系统,包括上述任一实施方式的电池模组的转运设备。
23、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种电池模组的转运设备,其特征在于,包括:
2.根据权利要求1所述的电池模组的转运设备,其特征在于,所述上料抓取结构包括第一抓取组件和第二抓取组件,所述第一抓取组件用于抓取单排的电池模组,所述第二抓取组件用于抓取双排的电池模组。
3.根据权利要求2所述的电池模组的转运设备,其特征在于,所述第一抓取组件包括:
4.根据权利要求3所述的电池模组的转运设备,其特征在于,所述第一抓取组件还包括两个第一夹爪,两个所述第一夹爪分别沿第二方向滑动连接于所述第一支架,用于沿所述第二方向夹持所述电池模组的端板;其中,所述第二方向电池模组的长度方向。
5.根据权利要求3所述的电池模组的转运设备,其特征在于,所述第一抓取组件还包括侧板夹持件,所述侧板夹持件包括:
6.根据权利要求2所述的电池模组的转运设备,其特征在于,所述第二抓取组件包括:
7.根据权利要求6所述的电池模组的转运设备,其特征在于,所述第二抓取组件还包括四个第二夹爪,其中两个所述第二夹爪沿第二方向滑动连接于所述第二支架,用于沿所述第二方向夹持第一排的电池模组的端板;另两个所述第二夹爪沿所述第二方向滑动连接于所述第二支架,用于沿所述第二方向夹持第二排的电池模组的端板;其中,所述第二方向为电池模组的长度方向。
8.根据权利要求6所述的电池模组的转运设备,其特征在于,所述第二抓取组件还包括中隔板夹持件,所述第二子板朝向所述第三子板的一侧以及所述第三子板朝向所述第二子板的一侧均设置有所述中隔板夹持件,所述中隔板夹持件用于夹持位于第一排的电池模组和第二排的电池模组之间的中隔板。
9.根据权利要求1-8任一项所述的电池模组的转运设备,其特征在于,所述下料抓取结构包括:
10.根据权利要求9所述的电池模组的转运设备,其特征在于,所述下料抓取结构还包括两个第三夹爪,两个所述第三夹爪分别沿第二方向滑动连接于所述第三支架,用于沿所述第二方向夹持单排或者双排的电池模组的端板;其中,所述第二方向为电池模组的长度方向。
11.一种转运系统,其特征在于,包括如权利要求1-10任一项所述的电池模组的转运设备。
技术总结
本申请公开了一种电池模组的转运设备和转运系统。转运设备包括上料装置和下料装置,上料装置包括上料机器人以及与上料机器人连接的上料抓取结构,上料装置用于将待焊接的电池模组搬运至焊接工位;下料装置包括下料机器人以及与下料机器人连接的下料抓取结构,下料装置用于将位于焊接工位焊接完成的电池模组搬运至下一工位。本申请提升了电池模组生产线的自动化程度,降低了人力劳动成本。
技术研发人员:宋魁魁,陈少林,王文冲
受保护的技术使用者:宁德时代新能源科技股份有限公司
技术研发日:20240126
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!