一种简易机械手及转运流水线的制作方法
本技术涉及物料转运,特别是涉及一种简易机械手及转运流水线。
背景技术:
1、在锥度杯体生产过程中,往往需要多种生产工序配合使用,这就避免不了多个生产工序之间进行物料输送,目前,通过多条输送带首尾连接形成生产流水线,但是由于各个生产工序的加工高度不同,导致一些输送带之间具有高度差,为了实现对具有高度差的输送带之间进行锥度杯体输送,现有基本采用4轴或6轴机械轴或3轴模组平移机械手,采购使用维护成本高,占用空间大,不利于狭小空间使用。
技术实现思路
1、本实用新型所要解决的技术问题是:现有机械手成本高、占用空间大、不利于狭小空间使用的问题。
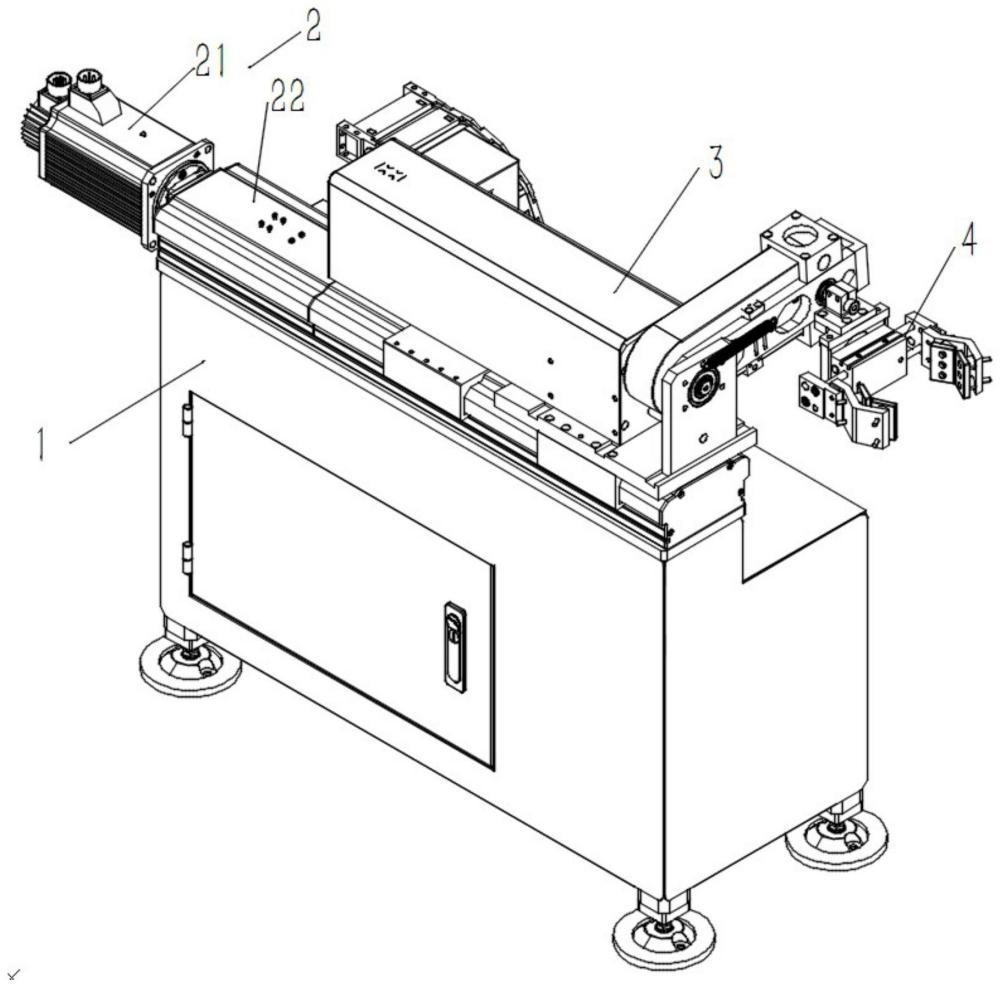
2、为解决上述技术问题,本实用新型提供的一种技术方案是:一种简易机械手,包括底座、滑动机构、翻转机构和夹持机构,其特征是:所述滑动机构水平设置在所述底座上,所述翻转机构设置在所述滑动机构上,并在所述滑动机构的作用下水平移动,所述夹持机构与所述翻转机构铰接,并在所述翻转机构带动所述夹持机构翻转的同时使夹持机构一直保持垂直往下。
3、进一步的,所述滑动机构包括直线滑动模组和滑动驱动电机,所述翻转机构通过所述直线滑动模组与所述底座滑动连接,且在所述滑动驱动电机的作用下实现所述翻转机构在所述底座上往复移动。
4、进一步的,所述翻转机构包括翻转驱动电机、底板、支撑板、轴承座和摆臂,翻转驱动电机通过支撑板固定在底板上,所述摆臂的一端固定设置有摆臂轴,摆臂轴通过轴承座与底板铰接,摆臂轴与翻转驱动电机连接,所述摆臂的另一端通过轴承座设置有形星恒定轴,所述形星恒定轴的一端与所述夹持机构铰接。
5、进一步的,所述轴承座和摆臂之间设置有拉簧。
6、进一步的,所述摆臂轴上套装有固定在所述轴承座上的固定同步轮,所述形星恒定轴上套装有自转同步轮,且固定同步轮和自转同步轮通过同步带联动。
7、进一步的,所述摆臂轴上设置有调整滑块,调整块上设置有调整轴承。
8、进一步的,所述夹持机构包括夹爪气缸和夹持臂,两个所述夹持臂设置在夹爪气缸的两侧,并在夹爪气缸的带动下进行夹持操作,所述夹持臂的相对两侧设置有橡胶垫。
9、为解决上述技术问题,本实用新型提供的一种技术方案是:一种转运流水线,包括上料线、机械手和分料线,所述机械手为上述所述的一种简易机械手,其特征是:上料线设置在所述机械手一侧,且上料线的输送方向与机械手中直线滑动模组平行,分料线设置在所述机械手另一侧,且分料线的输送方向与机械手中直线滑动模组垂直,且上料线和分料线之间有落差。
10、进一步的,所述分料线为至少两个,且沿机械手中直线滑动模组并排设置。
11、本实用新型的有益效果为:
12、1、本申请通过滑动机构、翻转机构和夹持机构之间的配合,形成简易转运装置,同时夹持机构与翻转机构铰接,在滑动机构和翻转机构的作用下实现夹持机构对杯体进行上下、左右、前后转运的过程中一直保持垂直往下状态,实现取放过程中杯体不跟随旋转刮擦输送带及角度变化,保证转运质量的同时降低成本。
13、2、本申请中翻转机构通过所述直线滑动模组与所述底座滑动连接,且在所述滑动驱动电机的作用下实现所述翻转机构在所述底座上往复移动,从而实现夹持机构沿直线滑动模组前后移动。
14、3、本申请中翻转驱动电机的输出轴通过减速机和联轴器与摆臂轴连接,从而实现摆臂绕摆臂轴旋转,从而带动夹持机构旋转,由于所述夹持机构通过形星恒定轴与摆臂铰接,由于夹持机构为偏心结构,从而使夹持机构在翻转过程中一直保持垂直往下状态。
15、4、本申请中固定同步轮套在摆臂轴上并固定在轴承座上,固定同步轮通过同步带与套装在形星恒定轴上的自转同步轮同步联动,实现两者的同步旋转,保证夹持机构在翻转过程中一直保持垂直往下状态,防止翻转过程中夹持机构晃动,同时调整轴承对同步带进行压紧,防止同步带松动。
16、5、本申请中夹持机构结构与现有技术中相同,实现重复利用,进一步降低成本,同时,夹持臂的相对两侧设置有橡胶垫,增加与物料的摩擦力防止掉落的同时,还起到缓冲作用,减少对物料的损坏。
17、为了让本实用新型的上述和其他目的、特征和优点更能明显易懂,下文特举较佳实施例,并配合所附图示,做详细说明如下。
技术特征:
1.一种简易机械手,包括底座、滑动机构、翻转机构和夹持机构,其特征是:所述滑动机构水平设置在所述底座上,所述翻转机构设置在所述滑动机构上,并在所述滑动机构的作用下水平移动,所述夹持机构与所述翻转机构铰接,并在所述翻转机构带动所述夹持机构翻转的同时使夹持机构一直保持垂直往下。
2.根据权利要求1所述的一种简易机械手,其特征是:所述滑动机构包括直线滑动模组和滑动驱动电机,所述翻转机构通过所述直线滑动模组与所述底座滑动连接,且在所述滑动驱动电机的作用下实现所述翻转机构在所述底座上往复移动。
3.根据权利要求2所述的一种简易机械手,其特征是:所述翻转机构包括翻转驱动电机、底板、支撑板、轴承座和摆臂,翻转驱动电机通过支撑板固定在底板上,所述摆臂的一端固定设置有摆臂轴,摆臂轴通过轴承座与底板铰接,摆臂轴与翻转驱动电机连接,所述摆臂的另一端通过轴承座设置有形星恒定轴,所述形星恒定轴的一端与所述夹持机构铰接。
4.根据权利要求3所述的一种简易机械手,其特征是:所述轴承座和摆臂之间设置有拉簧。
5.根据权利要求3所述的一种简易机械手,其特征是:所述摆臂轴上套装有固定在所述轴承座上的固定同步轮,所述形星恒定轴上套装有自转同步轮,且固定同步轮和自转同步轮通过同步带联动。
6.根据权利要求5所述的一种简易机械手,其特征是:所述摆臂轴上设置有调整滑块,调整块上设置有调整轴承。
7.根据权利要求6所述的一种简易机械手,其特征是:所述夹持机构包括夹爪气缸和夹持臂,两个所述夹持臂设置在夹爪气缸的两侧,并在夹爪气缸的带动下进行夹持操作,所述夹持臂的相对两侧设置有橡胶垫。
8.一种转运流水线,包括上料线、机械手和分料线,所述机械手为权利要求1-7任一项所述的一种简易机械手,其特征是:上料线设置在所述机械手一侧,且上料线的输送方向与机械手中直线滑动模组平行,分料线设置在所述机械手另一侧,且分料线的输送方向与机械手中直线滑动模组垂直,且上料线和分料线之间有落差。
9.根据权利要求8所述的一种转运流水线,其特征是:所述分料线为至少两个,且沿机械手中直线滑动模组并排设置。
技术总结
本技术公开了一种简易机械手及转运流水线,滑动机构水平设置在底座上,翻转机构设置在滑动机构上,并在滑动机构的作用下水平移动,夹持机构与翻转机构铰接,并在翻转机构带动夹持机构翻转的同时使夹持机构一直保持垂直往下;本申请通过滑动机构、翻转机构和夹持机构之间的配合,形成简易转运装置,同时夹持机构与翻转机构铰接,在滑动机构和翻转机构的作用下实现夹持机构对杯体进行上下、左右、前后转运的过程中一直保持垂直往下状态,实现取放过程中杯体不跟随旋转刮擦输送带及角度变化,保证转运质量的同时降低成本。
技术研发人员:李荣伟,周生海,应鸿瑞
受保护的技术使用者:浙江哈尔斯真空器皿股份有限公司
技术研发日:20240206
技术公布日:2024/11/14
- 还没有人留言评论。精彩留言会获得点赞!