一种物料运输机器人的制作方法
本技术属于轨道设备,尤其涉及一种物料运输机器人。
背景技术:
1、管带机是一种连续、高效的运输设备,管带机的日常安全生产巡检工作,通常由人工巡检的方式进行。人工巡检是由巡检人员沿管带机步行对管带机的皮带支撑托辊进行目视检查,并对损坏的托辊进行标记,然后在管带机停机后,携带新托辊和工具到标记位置进行更换。
2、但是,由于管带机长度在几千米甚至几十千米,单个托辊的重量9kg左右,托辊和工具的运输路程长、劳动强度大、携带托辊数量有限,因此对工作人员的维修带来极大的不便,不利于提高工作效率。
技术实现思路
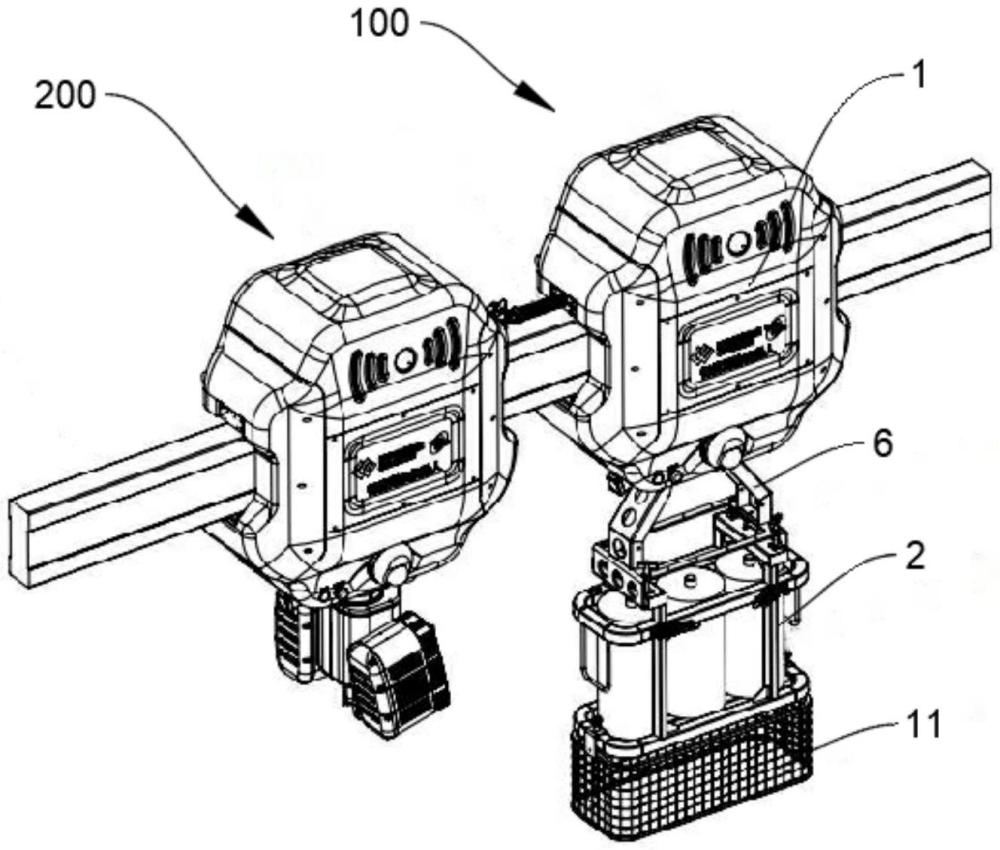
1、为了解决上述技术问题,本实用新型公开了一种物料运输机器人,使物料运输机器人在轨道上运行,同时携带维修所需要的工具,从而有效降低工作人员的劳动强度。
2、本实用新型的具体技术方案如下:
3、一种物料运输机器人,包括:
4、运动本体,所述运动本体与轨道滑动连接;以及
5、第一工具箱,所述第一工具箱与运动本体可拆卸连接;
6、其中,所述运动本体底部的任意一对对侧设置有滑槽,所述滑槽朝向运动本体的内侧;所述第一工具箱的上部设置有滑动部,所述滑动部和滑槽滑动连接;
7、所述运动本体和第一工具箱通过第一定位销限位。
8、所述运动本体和第一工具箱的连接方式简单、实用,第一工具箱能够快速的同运动本体实现安装和拆卸,所述第一定位销能够保证运动本体和第一工具箱之间的位置限位,从而在运动本体沿轨道运动的过程中,保证运动本体和第一工具箱之间的连接稳定性;所述第一工具箱通过滑动的方式与运动本体连接,进一步提高装卸效率,并且,由于滑动位置位于运动本体的内侧,因此相较于在运动本体的外侧滑动连接,有效的减小装配体积。
9、优选的,所述运动本体和第一工具箱之间设有托架,所述第一工具箱与托架滑动连接;所述滑槽设置在托架上。
10、所述托架能够为第一工具箱提供适当的装配距离,同时也避免第一工具箱和运动本体之间的直接装配存在干涉问题而无法得到较高的连接稳定性。
11、优选的,所述第一工具箱为框架结构,所述第一工具箱包括:
12、框体,所述框体与托架滑动连接;以及
13、档杆,所述档杆的一端与框体转动连接,另一端和框体卡扣连接。
14、所述档杆能够相对于框体转动,因此方便工作人员从框体中取出所需工具,而卡扣的设置则能够很好的实现框体开关,避免第一工具箱跟随运送机器人运动而导致框内工具掉落。
15、优选的,还包括:
16、第二工具箱,所述第二工具箱通过挂钩与第一工具箱连接,所述挂钩由弹性材料制成;
17、其中,所述第二工具箱和第一工具箱通过第二定位销限位。
18、所述第二工具箱为物料运输机器人提供了更多的装载空间,而挂钩能够使得第二工具箱和第一工具箱之间的连接更为简易。
19、优选的,所述运动本体包括:
20、上行走机构,用于在轨道的上部稳定运动本体的行走状态;
21、下行走机构,用于在轨道的下部稳定运动本体的行走状态;以及
22、驱动机构,用于驱动运动本体在轨道上运动;
23、其中,所述上行走机构、下行走机构和驱动机构通过动力框架连接。
24、所述上行走机构和下行走机构使得运动本体紧贴轨道,从而在驱动机构动作时,为运动本体提供更加稳定的行走动力。
25、优选的,所述下行走机构包括:
26、下安装架;
27、转动连接在下安装架两端的浮动轮架,所述浮动轮架设有下支撑轮;以及
28、弹性连杆构件,所述弹性连杆构件设置在下安装架和浮动轮架之间,用于将下支撑轮紧压在轨道上。
29、由于物料运输机器人本身具有相当的重量,因此,通过自重能够确保上行走机构和轨道轨面之间的贴合运动,而下行走机构通过弹性连杆构件的形变能力,使得下支撑轮在贴合轨道时,浮动轮架具有继续朝下安装架的运动趋势,也就是说,通过弹性连杆构件的设置,使得下支撑轮和轨道之间持续存在相互挤压的相对作用力,由此通过上行走机构和下行走机构实现对轨道的抱合,从而使得物料运输机器人的行走更加稳定。
30、优选的,所述上行走机构和下行走机构均设有浮动导向组件,位于相应行走机构的侧面,用于适应物料运输机器人在轨道上转弯。
31、所述浮动导向组件能够适应轨道的弯道,使得灭火机器人能够在轨道上很好的运动。
32、优选的,所述驱动机构包括:
33、至少一个驱动轮,所述驱动轮和轨道的侧面接触;以及
34、链轮,所述链轮和驱动轮传动连接,用于和设置在轨道上的链条啮合,避免爬坡打滑。
35、由于物料运输机器人装载了工具,并且自身具被相当的重量,因此在遇到坡道时,物料运输机器人不易上坡或者容易在坡道上产生打滑,因而在轨道的坡道设置链条,使物料运输机器人在上坡时,其链轮能够和链条啮合,从而避免物料运输机器人打滑。
36、优选的,所述驱动机构还包括:
37、法兰座,所述驱动轮和链轮均设置在法兰座上,所述法兰座的两端通过缓振机构与动力框架连接。
38、所述法兰座和相对于动力框架浮动,因而避免链轮和链条接触时刚性接触,顶起运动本体,从而避免运动本体在运动过程中产生振动、抖动。
39、优选的,还包括:
40、牵引拉杆,所述牵引拉杆设置在运动本体上,所述牵引拉杆的轴向延长线与轨道的延长线平行。
41、一般来说,在管带机的沿线上设置有巡检机器人进行巡检,但是巡检机器人可能出现抛锚,此时,可以通过将物料运输机器人行驶到巡检机器人抛锚的位置,以牵引拉杆连接物料运输机器人,从而通过物料运输机器人携带抛锚的巡检机器人回到维修位置,以供工作人员处理。
42、和现有技术相比,本实用新型能够代替人工携带维修重量,有效降低工作人员的劳动强度、有效的提升作业效率;本实用新型能够达到稳定的运动状态,并且在坡道爬坡时,能够避免打滑;此外,本实用新型还能够牵引抛锚的巡检机器人运动,将抛锚的巡检机器人带回维修位置。
技术特征:
1.一种物料运输机器人,其特征在于,包括:
2.如权利要求1所述的一种物料运输机器人,其特征在于,所述运动本体和第一工具箱之间设有托架,所述第一工具箱与托架滑动连接;所述滑槽设置在托架上。
3.如权利要求1所述的一种物料运输机器人,其特征在于,所述第一工具箱为框架结构,所述第一工具箱包括:
4.如权利要求1所述的一种物料运输机器人,其特征在于,还包括:
5.如权利要求1所述的一种物料运输机器人,其特征在于,所述运动本体包括:
6.如权利要求5所述的一种物料运输机器人,其特征在于,所述下行走机构包括:
7.如权利要求5所述的一种物料运输机器人,其特征在于,所述上行走机构和下行走机构均设有浮动导向组件,位于相应行走机构的侧面,用于适应物料运输机器人在轨道上转弯。
8.如权利要求5所述的一种物料运输机器人,其特征在于,所述驱动机构包括:
9.如权利要求8所述的一种物料运输机器人,其特征在于,所述驱动机构还包括:
10.如权利要求1所述的一种物料运输机器人,其特征在于,还包括:
技术总结
本技术属于轨道设备技术领域,公开了一种物料运输机器人,包括运动本体和第一工具箱;所述运动本体与轨道滑动连接;所述第一工具箱与运动本体可拆卸连接;所述运动本体底部的任意一对对侧设置有滑槽,所述滑槽朝向运动本体的内侧;所述第一工具箱的上部设置有滑动部,所述滑动部和滑槽滑动连接;所述运动本体和第一工具箱通过第一定位销限位。本技术使物料运输机器人在轨道上运行,同时携带维修所需要的工具,从而有效降低工作人员的劳动强度。
技术研发人员:赵波,王祯,王小伟,张渝,彭建平,徐朝学,廖小笼,顾万富,李庆成
受保护的技术使用者:北京主导时代科技有限公司
技术研发日:20240228
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!