一种上下料智能机器人的制作方法
本技术涉及机器人,尤其涉及一种上下料智能机器人。
背景技术:
1、随着人们生活水平的快速发展,机器人在各自不同零件加工时使用越来越频繁,且不光是在零件加工时会使用,还会在物料进行筛分转移的时候也使用机器人,因此机器人的使用场景非常广泛,因此对于机器人的功能优化是必要的。
2、例如在公告号为cn217349813u的中国实用新型专利中公开了一种智能机器人自动上下料装置,上述现有技术,虽然使得限位杆对夹爪进行限位,以避免夹爪松动,从而提高夹爪的稳定性,但是爪状结构的机器人在进行上料与下料时,都是通过夹爪来将物料进行抓紧转移的,抓取物料的夹爪大多为两爪或三爪结构,这样的夹爪在夹取物料时因为接触面积小,很容易导致物料表面被划伤,且爪状的结构也非常容易在夹持过程中将物料表面按压变形,因此设计一种夹取物料转移时,不会对物料表面造成损伤的上下料智能机器人是必要的。
技术实现思路
1、为解决夹爪机器人在进行物料转移时,容易导致物料表面划伤和变形的技术问题,本实用新型提供一种上下料智能机器人。
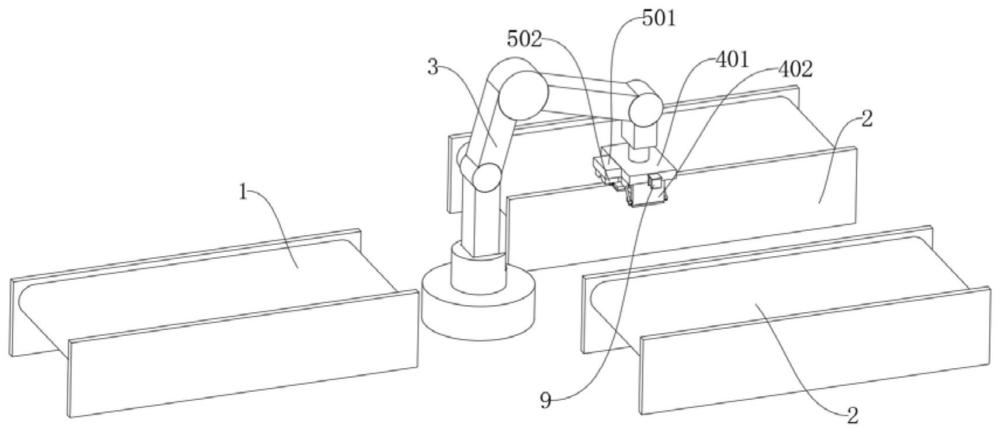
2、本实用新型采用以下技术方案实现:一种上下料智能机器人,包括第一物料输送带,所述第一物料输送带的一侧设有两个第二物料输送带,两个所述第二物料输送带之间设有将第一物料输送带上物料进行分类转运的智能机械手,所述智能机械手的夹持部分安装有对不同物料进行夹持转动的夹持组件,所述夹持组件的一侧设有能够对不同物料进行扫描并且区分的激光扫描组件,所述夹持组件的两侧均设有将物料进行夹持并抬起一定距离的抬起组件。
3、通过上述技术方案,在进行不同物料的筛分上下料时,激光扫描组件会将当前物料进行扫描,得出需要转移到哪个输送带上后,夹持组件会逐渐闭合,在闭合时,抬起组件会将物料进行小距离的夹持抬起,方便对物料进行移动。
4、作为上述方案的进一步改进,所述夹持组件包括固定安装在智能机械手上并开设有滑动槽的安装板和两个通过滑动槽滑动安装在安装板一侧的夹持板,两个所述夹持板均呈“l”形设置,两个所述夹持板的一侧均固定安装有海绵块。
5、通过上述技术方案,在物料转移时,物料会在两个夹持板之间,防止物料下落造成损坏。
6、作为上述方案的进一步改进,所述滑动槽的内部设有双向丝杆,所述双向丝杆的两端均螺纹贯穿相邻夹持板并与滑动槽内壁转动安装,所述安装板的一侧设有伺服电机,所述伺服电机的输出端固定安装有一端贯穿安装板并与双向丝杆一端固定安装的驱动杆。
7、通过上述技术方案,双向丝杆转动就会让两个夹持板将物料进行限位转移。
8、作为上述方案的进一步改进,所述激光扫描组件包括固定安装在安装板一侧的固定板和安装在固定板一侧的激光扫描仪。
9、通过上述技术方案,激光扫描仪会将物料进行扫描,再让智能机械手将物料移动到需要的输送带上。
10、作为上述方案的进一步改进,两个所述夹持板的两侧均开设有复位孔,所述抬起组件包括设置在夹持板一侧的抬起架和固定套设在抬起架上的橡胶柱。
11、通过上述技术方案,两个橡胶柱会将物料进行夹持,在夹持板的推动下将物料抬起。
12、作为上述方案的进一步改进,所述抬起架的两端均固定套设有连接块,两个所述连接块的一侧均安装有内部设有扭簧的转动块,两个所述转动块均安装在相邻复位孔的内部。
13、通过上述技术方案,内部有扭簧的转动块会辅助抬起架和橡胶柱将物料夹持并抬起。
14、相比现有技术,本实用新型的有益效果在于:
15、本实用新型通过设置夹持组件、激光扫描组件和抬起组件,达到当物料需要筛分转移时,激光扫描组件会将物料进行扫描,从而驱动智能机械手使用夹持组件将物料进行夹持,在夹持的过程中抬起组件会先接触物料,并将物料进行短距离的抬起,这样不仅能让对物料的挤压力度降低,还能避免物料在转移的过程中掉落的效果。
技术特征:
1.一种上下料智能机器人,包括第一物料输送带(1),所述第一物料输送带(1)的一侧设有两个第二物料输送带(2),两个所述第二物料输送带(2)之间设有将第一物料输送带(1)上物料进行分类转运的智能机械手(3),其特征在于,所述智能机械手(3)的夹持部分安装有对不同物料进行夹持转动的夹持组件,所述夹持组件的一侧设有能够对不同物料进行扫描并且区分的激光扫描组件,所述夹持组件的两侧均设有将物料进行夹持并抬起一定距离的抬起组件。
2.如权利要求1所述的一种上下料智能机器人,其特征在于,所述夹持组件包括固定安装在智能机械手(3)上并开设有滑动槽的安装板(401)和两个通过滑动槽滑动安装在安装板(401)一侧的夹持板(402),两个所述夹持板(402)均呈“l”形设置,两个所述夹持板(402)的一侧均固定安装有海绵块(7)。
3.如权利要求2所述的一种上下料智能机器人,其特征在于,所述滑动槽的内部设有双向丝杆(8),所述双向丝杆(8)的两端均螺纹贯穿相邻夹持板(402)并与滑动槽内壁转动安装,所述安装板(401)的一侧设有伺服电机(9),所述伺服电机(9)的输出端固定安装有一端贯穿安装板(401)并与双向丝杆(8)一端固定安装的驱动杆(10)。
4.如权利要求2所述的一种上下料智能机器人,其特征在于,所述激光扫描组件包括固定安装在安装板(401)一侧的固定板(501)和安装在固定板(501)一侧的激光扫描仪(502)。
5.如权利要求2所述的一种上下料智能机器人,其特征在于,两个所述夹持板(402)的两侧均开设有复位孔(11),所述抬起组件包括设置在夹持板(402)一侧的抬起架(601)和固定套设在抬起架(601)上的橡胶柱(602)。
6.如权利要求5所述的一种上下料智能机器人,其特征在于,所述抬起架(601)的两端均固定套设有连接块(12),两个所述连接块(12)的一侧均安装有内部设有扭簧的转动块(13),两个所述转动块(13)均安装在相邻复位孔(11)的内部。
技术总结
本技术涉及机器人技术领域,公开了一种上下料智能机器人,包括第一物料输送带,所述第一物料输送带的一侧设有两个第二物料输送带,两个所述第二物料输送带之间设有将第一物料输送带上物料进行分类转运的智能机械手,所述智能机械手的夹持部分安装有对不同物料进行夹持转动的夹持组件;通过设置夹持组件、激光扫描组件和抬起组件,达到当物料需要筛分转移时,激光扫描组件会将物料进行扫描,从而驱动智能机械手使用夹持组件将物料进行夹持,在夹持的过程中抬起组件会先接触物料,并将物料进行短距离的抬起,这样不仅能让对物料的挤压力度降低,还能避免物料在转移的过程中掉落的效果。
技术研发人员:宋志文,韦中连,卫亮亮,吴雪云
受保护的技术使用者:苏州正春智能科技有限公司
技术研发日:20240304
技术公布日:2024/11/26
- 还没有人留言评论。精彩留言会获得点赞!