一种自动上下物料接驳运输车的制作方法
本技术属于物料运输,具体涉及一种自动上下物料接驳运输车。
背景技术:
1、pcba产线产品完成后,将完成aoi检测的产品投入在线测试仪(ict)的过程中往往需要人工进行搬运操作。该方式具有费时费力和效率低等缺点。
2、因此,针对上述问题,予以进一步改进。
技术实现思路
1、本实用新型的主要目的在于提供一种自动上下物料接驳运输车,其通过支架模块、检测模块、机械臂模块和移动模块进行联动,将aoi工站的产品缓存仓自动进行搬运,通过巡线实现由aoi与ict工站之间的产品运输,优化了需要人工搬运中所存在的缺陷,节省人力成本。
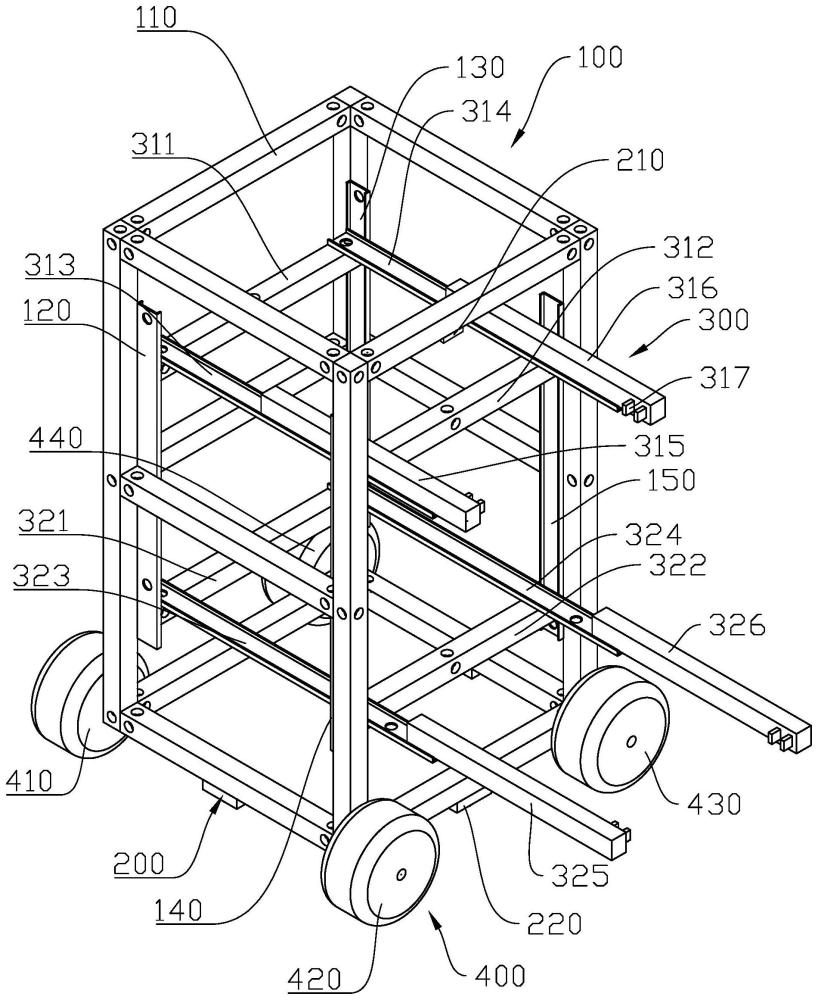
2、为达到以上目的,本实用新型提供一种自动上下物料接驳运输车,包括支架模块、检测模块、机械臂模块和移动模块,所述检测模块、所述机械臂模块和所述移动模块均安装于所述支架模块,其中:
3、所述机械臂模块包括第一机械臂单元和第二机械臂单元,所述第一机械臂单元包括第一支撑杆、第二支撑杆、第一滑轨、第二滑轨、第一机械臂和第二机械臂,所述第一滑轨和所述第二滑轨均安装于所述第一支撑杆和所述第二支撑杆之间,所述第一机械臂安装于所述第一滑轨并且所述第二机械臂安装于所述第二滑轨;所述第二机械臂单元包括第三支撑杆、第四支撑杆、第三滑轨、第四滑轨、第三机械臂和第四机械臂,所述第三滑轨和所述第四滑轨均安装于所述第三支撑杆和所述第四支撑杆之间,所述第三机械臂安装于所述第三滑轨并且所述第四机械臂安装于所述第四滑轨;
4、所述检测模块包括顶部传感器和底部传感器,所述顶部传感器安装于所述支架模块的顶部并且所述底部传感器安装于所述支架模块的底部;
5、所述移动模块包括第一万向轮、第二万向轮、第三万向轮和第四万向轮,所述第一万向轮、所述第二万向轮、所述第三万向轮和所述第四万向轮均安装于所述支架模块的底部。
6、作为上述技术方案的进一步优选的技术方案,所述支架模块包括框架、第一安装杆、第二安装杆、第三安装杆和第四安装杆,所述第一安装杆、所述第二安装杆、所述第三安装杆和所述第四安装杆均安装于所述框架的内侧壁。
7、作为上述技术方案的进一步优选的技术方案,所述第一支撑杆和所述第三支撑杆均安装于所述第一安装杆和所述第二安装杆之间;
8、所述第二支撑杆和所述第四支撑杆均安装于所述第三安装杆和所述第四安装杆之间。
9、作为上述技术方案的进一步优选的技术方案,所述第一机械臂、所述第二机械臂、所述第三机械臂和所述第四机械臂均设有抓取端。
10、作为上述技术方案的进一步优选的技术方案,自动上下物料接驳运输车还设有第一驱动电机、第二驱动电机和第三驱动电机,所述第一驱动电机分别与所述第一机械臂和所述第二机械臂连接,所述第二驱动电机分别与所述第三机械臂和所述第四机械臂连接,所述第三驱动电机分别与所述第一万向轮、所述第二万向轮、所述第三万向轮和所述第四万向轮连接。
技术特征:
1.一种自动上下物料接驳运输车,其特征在于,包括支架模块、检测模块、机械臂模块和移动模块,所述检测模块、所述机械臂模块和所述移动模块均安装于所述支架模块,其中:
2.根据权利要求1所述的一种自动上下物料接驳运输车,其特征在于,所述支架模块包括框架、第一安装杆、第二安装杆、第三安装杆和第四安装杆,所述第一安装杆、所述第二安装杆、所述第三安装杆和所述第四安装杆均安装于所述框架的内侧壁。
3.根据权利要求2所述的一种自动上下物料接驳运输车,其特征在于,所述第一支撑杆和所述第三支撑杆均安装于所述第一安装杆和所述第二安装杆之间;
4.根据权利要求3所述的一种自动上下物料接驳运输车,其特征在于,所述第一机械臂、所述第二机械臂、所述第三机械臂和所述第四机械臂均设有抓取端。
5.根据权利要求3所述的一种自动上下物料接驳运输车,其特征在于,自动上下物料接驳运输车还设有第一驱动电机、第二驱动电机和第三驱动电机,所述第一驱动电机分别与所述第一机械臂和所述第二机械臂连接,所述第二驱动电机分别与所述第三机械臂和所述第四机械臂连接,所述第三驱动电机分别与所述第一万向轮、所述第二万向轮、所述第三万向轮和所述第四万向轮连接。
技术总结
本技术公开了一种自动上下物料接驳运输车,包括支架模块、检测模块、机械臂模块和移动模块,所述检测模块、所述机械臂模块和所述移动模块均安装于所述支架模块,所述机械臂模块包括第一机械臂单元和第二机械臂单元,所述第一机械臂单元包括第一支撑杆、第二支撑杆、第一滑轨、第二滑轨、第一机械臂和第二机械臂。本技术公开的一种自动上下物料接驳运输车,其通过支架模块、检测模块、机械臂模块和移动模块进行联动,将AOI工站的产品缓存仓自动进行搬运,通过巡线实现由AOI与ICT工站之间的产品运输,优化了需要人工搬运中所存在的缺陷,节省人力成本。
技术研发人员:邹伟,袁斌,马宏军
受保护的技术使用者:浙江伊控动力系统有限公司
技术研发日:20240311
技术公布日:2024/11/21
- 还没有人留言评论。精彩留言会获得点赞!