膜带多向进料牵引结构的制作方法
本技术涉及光伏组件贴膜,尤其是一种膜带多向进料牵引结构。
背景技术:
1、在目前的太阳能光伏组件生产加工领域,随着生产强度和使用需求的不断提高,人们对太阳能光伏组件的结构和性能也提出了更高的要求。
2、现有的太阳能光伏组件加工生产过程中,为避免汇流带搭接在一起后出现短路,需通过背板条与eva进行隔离,将其汇流带部分的外部通过eva(乙烯-醋酸乙烯共聚物)条与背板条相粘接。
3、目前的贴膜机上,通常直接使用买来的大卷膜,因为大卷膜既能够覆盖大面积板,也能够裁切成小条,覆盖边缘位置。
4、但是,裁切后再贴附,不仅多一道工序,而且在裁切过程中,对加工精度要求较高,需要对大卷膜进行限位、对裁切后的条膜进行限位,并将裁切后的条膜移动至预期位置,操作较为繁琐。
技术实现思路
1、本申请人针对上述现有生产技术中的缺点,提供一种结构合理的膜带多向进料牵引结构,使用小卷的条膜,直接将条膜拉出后,切断牵引至贴膜位置,能够减少从大幅膜上裁切下小条的工序,进而降低操作难度。
2、本实用新型所采用的技术方案如下:
3、一种膜带多向进料牵引结构,包括连接设置的料卷架、贴膜机架,料卷架、贴膜机架之间连接有牵引爪组件,所述牵引爪组件包括:
4、换料夹爪,运动路径沿料卷架侧壁设置;换料夹爪至少有三个自由度,
5、取放料夹爪,运动路径包括两段,分别为沿贴膜机架侧壁的一段、垂直于贴膜机架侧壁的一段;取放料夹爪具有七个自由度。
6、作为上述技术方案的进一步改进:
7、换料夹爪的运动路径与取放料夹爪的运动路径之间设置打孔工位。
8、所述料卷架侧壁上设置有换料轨道,贴膜机架上设置有取放料轨道,换料轨道、取放料轨道共线设置。
9、所述换料夹爪用于抓取膜带的料头;取放料夹爪用于抓取整条待贴附膜带。
10、换料夹爪包括若干爪体,换料夹爪的爪体同步转动;爪体转动过程中,避让膜带,或夹持膜带的料头。
11、取放料轨道上滑移连接有横架,横架垂直于膜带的输出方向;横架上设置位移轨道,位移轨道上连接升降结构,取放料夹爪被升降结构带动。
12、取放料夹爪的七个自由度分别为:沿膜带输出方向的前后运动、沿横架上位移轨道的前后运动、沿升降结构的上下运动、取放料夹爪自身的转动。
13、取放料夹爪采用真空吸附结构,取放料夹爪的吸附面长度大于等于待贴附膜带的长度。
14、膜带切割工位位于换料夹爪的运动路径与取放料夹爪的运动路径之间。
15、本实用新型的有益效果如下:
16、本实用新型结构采用两组夹爪,分别是换料夹爪和取放料夹爪,针对长条形的膜带,提供抓取料头、吸附整条膜带两种抓取动作,尤其适用于小条膜料卷的上料。
17、本实用新型中,小卷条膜不需要额外裁切,只需要在牵引出预期长度后切断一次,即能够得到待贴附膜带。本实用新型将膜带的切断位置设置在两组夹爪的运动路径之间,当取放料夹爪抓取到预期长度膜带后,将已经打孔完成、吸附限位的膜带切断,再由取放料夹爪经过多向转动,将膜带放置到光伏板上。
18、本实用新型采用两组不同夹爪的目的,一方面体积较小的夹爪能够有效快捷地夹持料头、吸附面大的夹爪能够精准取放膜带;另一方面,每个夹爪所需运动的范围缩小、运动动作变少,相较于常规的一个夹爪操作,能够有效降低路径设置难度、完成两步骤的无缝衔接,提高工作效率。
技术特征:
1.一种膜带多向进料牵引结构,其特征在于:包括连接设置的料卷架(1)、贴膜机架(2),料卷架(1)、贴膜机架(2)之间连接有牵引爪组件,所述牵引爪组件包括:
2.如权利要求1所述的膜带多向进料牵引结构,其特征在于:换料夹爪(3)的运动路径与取放料夹爪(4)的运动路径之间设置打孔工位(5)。
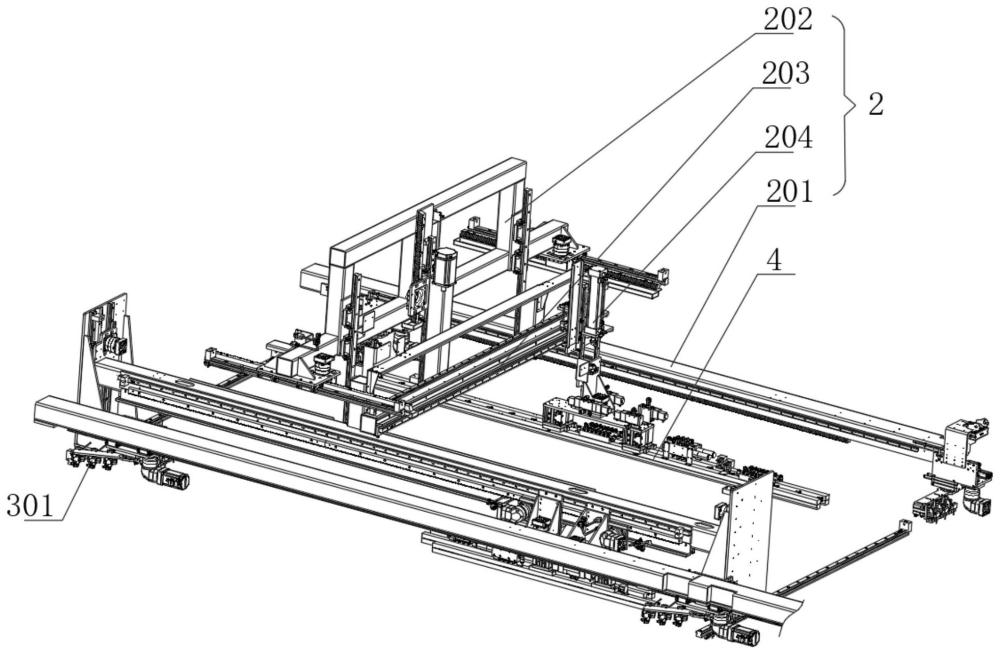
3.如权利要求1所述的膜带多向进料牵引结构,其特征在于:所述料卷架(1)侧壁上设置有换料轨道(101),贴膜机架(2)上设置有取放料轨道(201),换料轨道(101)、取放料轨道(201)共线设置。
4.如权利要求1所述的膜带多向进料牵引结构,其特征在于:所述换料夹爪(3)用于抓取膜带的料头;取放料夹爪(4)用于抓取整条待贴附膜带。
5.如权利要求4所述的膜带多向进料牵引结构,其特征在于:换料夹爪(3)包括若干爪体(301),换料夹爪(3)的爪体(301)同步转动;爪体(301)转动过程中,避让膜带,或夹持膜带的料头。
6.如权利要求4所述的膜带多向进料牵引结构,其特征在于:取放料轨道(201)上滑移连接有横架(202),横架(202)垂直于膜带的输出方向;横架(202)上设置位移轨道(203),位移轨道(203)上连接升降结构(204),取放料夹爪(4)被升降结构(204)带动。
7.如权利要求6所述的膜带多向进料牵引结构,其特征在于:取放料夹爪(4)的七个自由度分别为:沿膜带输出方向的前后运动、沿横架(202)上位移轨道(203)的前后运动、沿升降结构(204)的上下运动、取放料夹爪(4)自身的转动。
8.如权利要求4所述的膜带多向进料牵引结构,其特征在于:取放料夹爪(4)采用真空吸附结构,取放料夹爪(4)的吸附面(401)长度大于等于待贴附膜带的长度。
9.如权利要求1所述的膜带多向进料牵引结构,其特征在于:膜带切割工位位于换料夹爪(3)的运动路径与取放料夹爪(4)的运动路径之间。
技术总结
本技术涉及一种膜带多向进料牵引结构,包括连接设置的料卷架、贴膜机架,料卷架、贴膜机架之间连接有牵引爪组件,所述牵引爪组件包括:换料夹爪,运动路径沿料卷架侧壁设置;换料夹爪至少有三个自由度,取放料夹爪,运动路径包括两段,分别为沿贴膜机架侧壁的一段、垂直于贴膜机架侧壁的一段;取放料夹爪具有七个自由度。本技术尤其适用于光伏板边缘膜带贴附要求,能够通过使用小卷的条膜,直接将条膜拉出后,切断牵引至贴膜位置,能够减少从大幅膜上裁切下小条的工序,进而降低操作难度。
技术研发人员:胡锡锋,卓远,李博,杨旭涛,王其辰
受保护的技术使用者:无锡来诺斯科技有限公司
技术研发日:20240326
技术公布日:2024/10/14
- 还没有人留言评论。精彩留言会获得点赞!