一种多关节码垛机器人的制作方法
本技术涉及码垛机器人领域,尤其涉及一种多关节码垛机器人。
背景技术:
1、在医药、食品以及个人护理品等行业中,产品常用纸箱进行包装,为了便于产品后期的运输和数量统计,会将成箱的产品码垛到托盘上,以托盘为单位进行运输和计数。
2、传统的纸箱码垛方式是依靠人工搬运纸箱,劳动强度大,随着技术的迭代和科技的发展,目前可以采用码垛机器人进行纸箱自动码垛。
3、但是现有的码垛机器人进行纸箱码垛的方式仍不够完善,通常码垛机器人是在固定的工位进行纸箱码垛作业,移动不便,对不同作业场景箱体码垛的适用性差,并且现有码垛机器人的机械臂存在作业半径有限以及抓取箱体调整幅度有限的问题,整体的灵活性较差,有待改进。
技术实现思路
1、为了解决上述问题,本实用新型提出一种多关节码垛机器人。
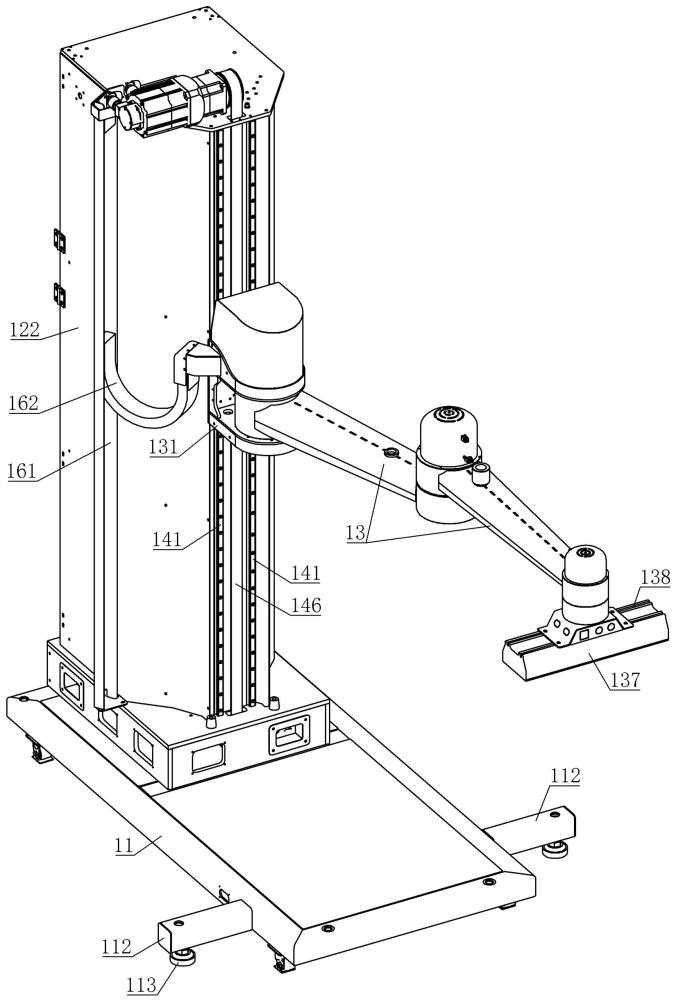
2、本实用新型的技术方案是:一种多关节码垛机器人,包括竖向固定安装在移动底座中部的支撑立柱、安装在支撑立柱上的机械臂机构,所述的支撑立柱为方形的铝合金型材,支撑立柱的外侧面沿其长度方向并排设有两导轨,两导轨之间设有一定间距,机械臂机构的支撑座对应设有两个分别与两导轨滑动连接的滑块,在导轨的下端通过轴承座设有横向轮轴,横向轮轴的中部安装有从动皮带轮,从动皮带轮位于两导轨的正中间,在支撑立柱的上端固定安装有减速电机,该减速电机的输出轴上安装有主动皮带轮,主动皮带轮和从动皮带轮上下对应,主动皮带轮和从动皮带轮之间安装有皮带,皮带的中部通过夹块组件与支撑座固定连接,夹块组件的两夹块之间均设有夹槽。
3、优选的,所述的机械臂机构包括第一支撑臂、第二支撑臂和吸盘组件,第一支撑臂的尺寸大于第二支撑臂的尺寸,第一支撑臂内端通过第一关节与支撑座横向转动连接,第二支撑臂通过第二关节与第一支撑臂外端横向转动连接,吸盘组件通过第三关节与第二支撑臂外端横向转动连接,吸盘组件整体为长方形,底面设有吸附小孔。
4、优选的,所述吸盘组件的吸盘壳体上表面设有调节长槽,通过该调节长槽对吸盘组件进行微调。
5、优选的,所述的第二关节包括关节电机、旋转支座和锁定帽,旋转支座固定安装在第二支撑臂端部的空腔内,关节电机通过电机支架固定在旋转支座上端,电机支架与旋转之间通过螺钉固定连接,锁定帽固定连接在第一支撑臂端部,在旋转支座的中部设有竖向通孔,竖向通孔内套装有下端与锁定帽固定连接的传动轴,竖向通孔的尺寸大于传动轴的尺寸,该传动轴的上端与关节电机的输出轴连接。
6、优选的,所述的关节电机上安装有密封壳体,密封壳体的顶部设有透气孔。
7、优选的,所述支撑立柱的两侧对称设有两辅助立柱,辅助立柱也为铝合金型材,两辅助立柱和支撑立柱之间形成v形支撑结构。
8、优选的,所述辅助立柱和支撑立柱的外侧之间设有密封板,在立柱外侧形成密封壳体结构。
9、优选的,所述移动底座的四角设有四个滚轮,并在移动底座的端部的两侧设有两延伸杆,延伸杆的外单设有可调节支腿。
10、优选的,所述支撑立柱的一侧竖向设有拖链滑槽,机械臂机构上的线缆拖链外端滑动安装在拖链滑槽内。
11、本实用新型的有益技术效果是:
12、本实用新型的机器人主体安装在移动底座上,便于机器人自由移动,并且机械臂机构由两节支撑臂和三个关节组成,通过这些关节和支撑臂的组合能够驱动吸盘组件自由转转并在水平方向自由调整位置,并可通过皮带驱动机械臂机构沿着支撑立柱上下滑动来调整高度,因此该机器人具有较大的作业半径来抓取箱体,并能灵活调整箱体的角度及高度来保证箱体整齐码放,具有作业场景适用性强、作业灵活度和作业效率高等优点。
技术特征:
1.一种多关节码垛机器人,其特征是:
2.根据权利要求1所述的一种多关节码垛机器人,其特征是:所述的机械臂机构包括第一支撑臂、第二支撑臂和吸盘组件,第一支撑臂内端通过第一关节与支撑座横向转动连接,第二支撑臂通过第二关节与第一支撑臂外端横向转动连接,吸盘组件通过第三关节与第二支撑臂外端横向转动连接。
3.根据权利要求2所述的一种多关节码垛机器人,其特征是:所述吸盘组件的吸盘壳体上表面设有调节长槽,通过该调节长槽对吸盘组件进行微调。
4.根据权利要求2所述的一种多关节码垛机器人,其特征是:所述的第二关节包括关节电机、旋转支座和锁定帽,旋转支座固定安装在第二支撑臂端部的空腔内,关节电机通过电机支架固定在旋转支座上端,锁定帽固定连接在第一支撑臂端部,在旋转支座的中部设有竖向通孔,竖向通孔内套装有下端与锁定帽固定连接的传动轴,该传动轴的上端与关节电机的输出轴连接。
5.根据权利要求4所述的一种多关节码垛机器人,其特征是:所述的关节电机上安装有密封壳体。
6.根据权利要求1所述的一种多关节码垛机器人,其特征是:所述支撑立柱的两侧对称设有两辅助立柱,两辅助立柱和支撑立柱之间形成v形支撑结构。
7.根据权利要求6所述的一种多关节码垛机器人,其特征是:所述辅助立柱和支撑立柱的外侧之间设有密封板,在立柱外侧形成密封壳体结构。
8.根据权利要求1所述的一种多关节码垛机器人,其特征是:所述移动底座的四角设有四个滚轮,并在移动底座的端部的两侧设有两延伸杆,延伸杆的外单设有可调节支腿。
9.根据权利要求1所述的一种多关节码垛机器人,其特征是:所述支撑立柱的一侧竖向设有拖链滑槽,机械臂机构上的线缆拖链外端滑动安装在拖链滑槽内。
技术总结
一种多关节码垛机器人,包括竖向固定安装在移动底座中部的支撑立柱、安装在支撑立柱上的机械臂机构,支撑立柱的外侧面沿其长度方向并排设有两导轨,机械臂机构的支撑座对应设有两个分别与两导轨滑动连接的滑块,在导轨的下端通过轴承座设有横向轮轴,横向轮轴的中部安装有从动皮带轮,在支撑立柱的上端安装有减速电机,该减速电机的输出轴上安装有主动皮带轮,主动皮带轮和从动皮带轮之间安装有皮带,皮带的中部通过夹块组件与支撑座固定连接;该机器人具有较大的作业半径来抓取箱体,并能灵活调整箱体的角度及高度来保证箱体整齐码放,具有作业场景适用性强、作业灵活度和作业效率高等优点。
技术研发人员:李应生,李向前,郭贞飞,李世展,马春艳
受保护的技术使用者:郑州智汇机械设备有限公司
技术研发日:20240403
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!