一种具有配重防倾倒式机器人的制作方法
本技术涉及机器人,尤其公开了一种具有配重防倾倒式机器人。
背景技术:
1、随着现代社会科技的发展,工业机器人在现代工业的运输中得到了广泛的应用,但是现有的工业机器人在使用时不具备防倾倒的功能,在工业机器人进行长时间的工作或搬运较重的物品时容易出现倾倒现象,造成工业机器人出现损坏,从而导致工业机器人的使用寿命较短的问题,降低了工业机器人的工作稳定性。
技术实现思路
1、为了克服现有技术中存在的缺点和不足,本实用新型的目的在于提供一种结构简单,适用于广泛生产的具有配重防倾倒功能的机器人。
2、为实现上述目的,本实用新型的一种具有配重防倾倒式机器人,包括底座、设于底座上方的电控装置以及机械手;所述底座上设置有配重部以及与配重部配合使用的延长臂,所述配重部用于增大底座与外部的承载面之间的接触面积以将底座稳定限位在外部的承载面,电控装置用于控制机械手往复移动移送外部料件,所述延长臂朝向机伸缩设置在底座上以降低机械手在移送料件时的重心防止机器人倾倒。
3、进一步的,所述配重部或/和底座设有用于容设延长臂的容置腔,延长臂伸缩设置在容置腔内。
4、进一步的,所述延长臂的一端与底座通过可拆卸的紧固件连接。
5、进一步的,所述延长臂突伸出底座的长度大于机械手的单次移动距离或/和机械手的移动路径的半径。
6、进一步的,所述延长臂远离底座的一端还设有多功能传感器,所述电控装置具有控制系统,多功能传感器与控制系统电连接,控制系统用于接收多功能传感器检测到的延长臂的倾斜信号并控制机械手向与其移送方向的相反方向移动或停止移动。
7、进一步的,所述第一拾取件为真空吸塑盘。
8、进一步的,所述配重部和延长臂分别设置在底座的相对两侧。
9、进一步的,所述电控装置上设有安装座,所述机械手具有机械臂和设置在机械臂上的第一拾取件,机械臂远离第一拾取件的一端经由安装座与电控装置连接,电控装置经由机械臂驱动第一拾取件取放外部料件。
10、进一步的,所述机械臂包括第一关节、第二关节、第三关节、第四关节、第五关节、第六关节、第七关节、第一臂体以及第二臂体;所述第一关节转动设置在安装座上,第二关节与第一关节转动连接,第一关节的转动轴线与第二关节的转动轴线交叉设置,第一臂体连接在第二关节和第三关节之间,第三关节与第四关节同轴转动连接,第二臂体连接在第四关节和第五关节之间,第五关节与第六关节转动连接,第四关节的转动轴线和第六关机的转动轴线与第二臂体的中心轴线交叉设置,第六关节与第七关节转动连接,第六关节的转动轴线与第七关节的转动轴线交叉设置,第二关节、第三关节、第五关节的转动轴线彼此平行设置。
11、进一步的,所述第一关节、第二关节、第三关节、第五关节以及第七关节均包括壳体,设置在壳体内的驱动电机、传动组件以及减速机;所述传动组件包括与驱动电机的输出轴连接的主动轮、经由皮带与主动轮传动连接的从动轮,所述从动轮与减速机的输入端连接,所述驱动电机与电控装置电连接,电控装置经由驱动电机驱动机械手往复移动取放外部料件。
12、本实用新型的有益效果:
13、(1)本实用新型通过在机器人的底座上设置配重部增加底座与地面的接触面积以及底座的重量,使得机器人的重心更稳定,防止机器人在移送物料的过程中出现倾倒的现象。
14、(2)通过在底座上增设可伸缩的延长臂,延长臂突伸出底座的长度大于机器人的机械手的单次移动距离或/和机械手的移动路径的半径,以此来降低机器人在移送料件时的工作重心,防止机器人在移送料件时出现倾倒现象。
15、(3)延长臂远离底座的一端安装有多功能传感器,多功能传感器与电控装置中的控制系统电连接,当多功能传感器检测到延长臂与地面产生倾斜角时,会控制机械手调整其移送动作,进一步的防止机器人在工作时发生倾倒现象。
技术特征:
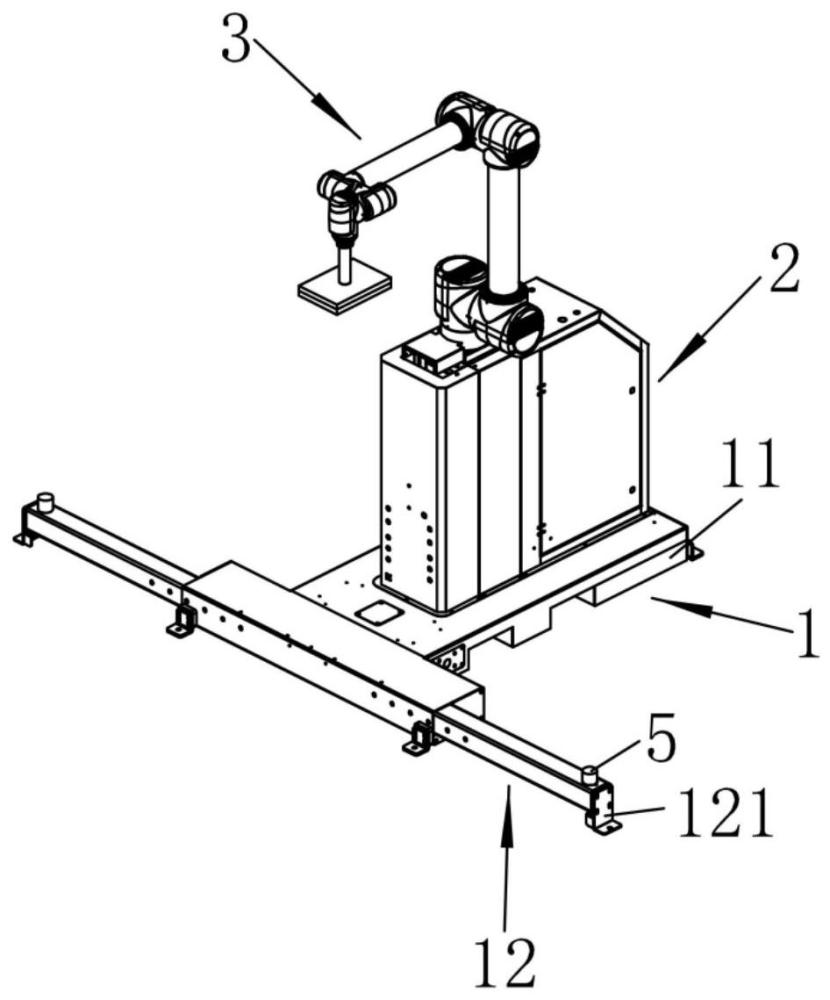
1.一种具有配重防倾倒式机器人,包括底座(1)、设于底座(1)上的电控装置(2)以及机械手(3);其特征在于:所述底座(1)上设置有配重部(11)以及与配重部(11)配合使用的延长臂(12),所述配重部(11)用于将底座(1)稳定限位在外部的承载面,电控装置(2)与机械手(3)连接并用于控制机械手(3)往复移动移送外部料件,所述延长臂(12)朝向机伸缩设置在底座(1)上以降低机械手(3)在移送料件时的重心防止机器人倾倒。
2.根据权利要求1所述的一种具有配重防倾倒式机器人,其特征在于:所述底座(1)设有用于容设延长臂(12)的容置腔(4),延长臂(12)相对底座(1)伸缩设置在容置腔(4)内。
3.根据权利要求1所述的一种具有配重防倾倒式机器人,其特征在于:所述延长臂(12)的一端与底座(1)通过可拆卸的紧固件连接。
4.根据权利要求1所述的一种具有配重防倾倒式机器人,其特征在于:所述延长臂(12)突伸出底座(1)的长度大于机械手(3)的单次移动距离或/和机械手(3)的移动路径的半径。
5.根据权利要求1所述的一种具有配重防倾倒式机器人,其特征在于:所述延长臂(12)的数量至少为两个,两个延长臂(12)分别突伸出底座(1)彼此远离的两侧。
6.根据权利要求1所述的一种具有配重防倾倒式机器人,其特征在于:所述配重部(11)和延长臂(12)分别设置在底座(1)彼此远离的两侧。
7.根据权利要求1所述的一种具有配重防倾倒式机器人,其特征在于:所述延长臂(12)远离底座(1)的一端还设有多功能传感器(5),所述电控装置(2)具有控制系统,多功能传感器(5)与控制系统电连接,控制系统用于接收多功能传感器(5)检测到的延长臂(12)的倾斜信号并控制机械手(3)向其移送方向的反方向移动或停止移动。
8.根据权利要求1所述的一种具有配重防倾倒式机器人,其特征在于:所述电控装置(2)上设有安装座(21),所述机械手(3)具有机械臂(31)和设置在机械臂(31)上的第一拾取件(32),机械臂(31)远离第一拾取件(32)的一端经由安装座(21)与电控装置(2)连接,电控装置(2)经由机械臂(31)驱动第一拾取件(32)取放外部料件。
9.根据权利要求8所述的一种具有配重防倾倒式机器人,其特征在于:所述机械臂(31)包括第一关节(310)、第二关节(311)、第三关节(313)、第四关节(314)、第五关节(316)、第六关节(317)、第七关节(318)、第一臂体(312)以及第二臂体(315);所述第一关节(310)转动设置在安装座(21)上,第二关节(311)与第一关节(310)转动连接,第一关节(310)的转动轴线与第二关节(311)的转动轴线交叉设置,第一臂体(312)连接在第二关节(311)和第三关节(313)之间,第三关节(313)与第四关节(314)同轴转动连接,第二臂体(315)连接在第四关节(314)和第五关节(316)之间,第五关节(316)与第六关节(317)转动连接,第四关节(314)的转动轴线和第六关机的转动轴线与第二臂体(315)的中心轴线交叉设置,第六关节(317)与第七关节(318)转动连接,第六关节(317)的转动轴线与第七关节(318)的转动轴线交叉设置,第二关节(311)、第三关节(313)、第五关节(316)的转动轴线彼此平行设置。
10.根据权利要求9所述的一种具有配重防倾倒式机器人,其特征在于:所述第一关节(310)、第二关节(311)、第三关节(313)、第五关节(316)以及第七关节(318)均包括壳体(6),设置在壳体(6)内的驱动电机(61)、传动组件(62)以及减速机(63);所述传动组件(62)包括与驱动电机(61)的输出轴连接的主动轮(621)、经由皮带与主动轮(621)传动连接的从动轮(622),所述从动轮(622)与减速机(63)的输入端连接,所述驱动电机(61)与电控装置(2)电连接,电控装置(2)经由驱动电机(61)驱动机械手(3)往复移动取放外部料件。
技术总结
本技术涉及机器人技术领域,尤其公开了一种具有配重防倾倒式机器人,包括底座、设于底座上方的电控装置以及机械手;所述底座上设置有配重部以及与配重部配合使用的延长臂,所述配重部用于增大底座与外部的承载面之间的接触面积以将底座稳定限位在外部的承载面,电控装置用于控制机械手往复移动移送外部料件,所述延长臂朝向机伸缩设置在底座上以降低机械手在移送料件时的重心防止机器人倾倒。通过在机器人的底座上设置配重部以及延长臂,配重部增加底座与地面的接触面积以及底座的重量,延长臂的设置则可以降低机器人的重心,增加机器人在工作时的稳定性,防止机器人在移送物料的过程中出现倾倒的现象。
技术研发人员:陈敦坚,戚广图,周春翔
受保护的技术使用者:华盛控智能科技(广东)有限公司
技术研发日:20240429
技术公布日:2025/3/6
- 还没有人留言评论。精彩留言会获得点赞!