一种追踪用抓瓶机构的制作方法
本技术涉及一种追踪用抓瓶机构。
背景技术:
1、喷涂瓶罐生产领域绝大多数采用平顶链输送玻璃瓶罐来进行包装作业,在包装作业中需要将单个玻璃瓶罐从平顶链上取下并放置到载具或瓶垛中进行码垛,此过程中往往需要投入大量人力。
技术实现思路
1、为解决上述技术问题,本实用新型提出一种追踪用抓瓶机构,用于对平顶链上玻璃瓶罐的抓取,起到节省人力、提升效率的效果。
2、为实现上述目的,本实用新型采用如下技术方案:
3、一种追踪用抓瓶机构,其结构特点是:
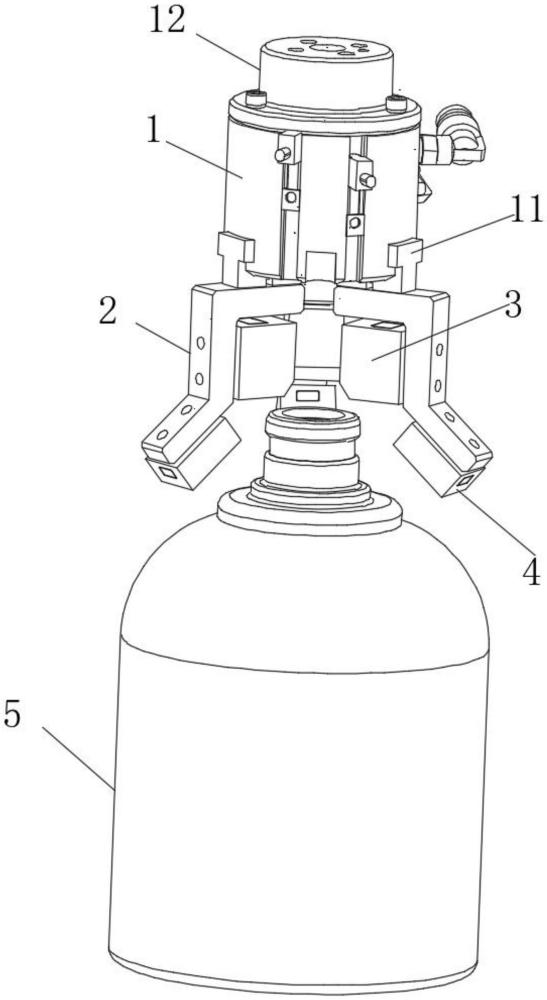
4、三爪气动手指的夹爪朝下,顶端安装用于与外部设备装配的联接件,各夹爪上分别通过夹持臂安装夹持块与扶正块,各夹持块与扶正块一上一下,分别环绕三爪气动手指的中轴线沿圆周方向等距间隔分布,随着各夹爪的张开与收拢,以三爪气动手指的中轴线为中心,各夹持块或朝向中心收拢或背离中心张开,各扶正块或朝向中心收拢或背离中心张开;
5、待抓取的玻璃瓶罐位于机构的正下方,瓶口朝上,张开的各夹持块与各扶正块位于玻璃瓶罐瓶口外围,收拢的各夹持块夹紧于玻璃瓶罐的瓶口,收拢的各扶正块相适配地压覆于玻璃瓶罐瓶口与瓶肩衔接处。
6、本实用新型的结构特点也在于:
7、三爪气动手指的三个夹爪沿圆周方向等距间隔分布。
8、所述夹持块为聚氨酯材质。
9、所述扶正块为硅胶材质。
10、所述夹持块以夹紧面与玻璃瓶罐的瓶口部位相接触,夹紧面底部带有倒角。
11、所述夹持臂的下端部沿着三爪气动手指的径向朝外翻折,翻折段安装所述扶正块,所述扶正块以扶正面与玻璃瓶罐相接触,扶正面按照所压覆处瓶肩的倾斜角度对应倾斜设置。
12、与已有技术相比,本实用新型有益效果体现在:
13、本实用新型可实现对单个玻璃瓶罐的有效夹紧,利用三爪气动手指的驱动,通过三个夹紧块稳定夹持于瓶口部位,同时辅以三个扶正块扶正瓶口与瓶肩衔接部位,使抓取过程中保持对玻璃瓶罐的有效扶正,进一步保障夹紧效果,避免玻璃瓶罐在被抓取移动过程中发生摆动而掉瓶,本实用新型可与外部设备配套应用,提高作业自动化程度与作业效率。
技术特征:
1.一种追踪用抓瓶机构,其特征是:
2.根据权利要求1所述的追踪用抓瓶机构,其特征是:三爪气动手指的三个夹爪沿圆周方向等距间隔分布。
3.根据权利要求1所述的追踪用抓瓶机构,其特征是:所述夹持块为聚氨酯材质。
4.根据权利要求1所述的追踪用抓瓶机构,其特征是:所述扶正块为硅胶材质。
5.根据权利要求1或3所述的追踪用抓瓶机构,其特征是:所述夹持块以夹紧面与玻璃瓶罐的瓶口部位相接触,夹紧面底部带有倒角。
6.根据权利要求1或4所述的追踪用抓瓶机构,其特征是:所述夹持臂的下端部沿着三爪气动手指的径向朝外翻折,翻折段安装所述扶正块,所述扶正块以扶正面与玻璃瓶罐相接触,扶正面按照所压覆处瓶肩的倾斜角度对应倾斜设置。
技术总结
本技术提供了一种追踪用抓瓶机构,三爪气动手指的夹爪朝下,顶端安装用于与外部设备装配的联接件,各夹爪上分别通过夹持臂安装夹持块与扶正块,各夹持块与扶正块一上一下,分别环绕三爪气动手指的中轴线沿圆周方向等距间隔分布,随着各夹爪的张开与收拢,以三爪气动手指的中轴线为中心,各夹持块或朝向中心收拢或背离中心张开,各扶正块或朝向中心收拢或背离中心张开;待抓取的玻璃瓶罐位于机构的正下方,瓶口朝上,张开的各夹持块与各扶正块位于玻璃瓶罐瓶口外围,收拢的各夹持块夹紧于玻璃瓶罐的瓶口,收拢的各扶正块相适配地压覆于玻璃瓶罐瓶口与瓶肩衔接处。本技术用于对平顶链上玻璃瓶罐的抓取,起到节省人力、提升效率的效果。
技术研发人员:张琼琼,朱现松,潘飞飞,明廷寅
受保护的技术使用者:安徽古井贡酒股份有限公司
技术研发日:20240527
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!