一种物流机器人升降机构用铝型材立柱的制作方法
本技术涉及铝型材立柱,具体为一种物流机器人升降机构用铝型材立柱。
背景技术:
1、对于物流机器人升降机构,使用立柱是一种常见的设计选择。立柱可以确保机器人在升降过程中的稳定性和安全性。立柱通常由钢材制成。设计通常考虑到重量承载能力、结构稳定性和耐用性。立柱可以通过电机或液压系统实现升降功能。电机驱动的立柱通常具有简单的结构和较低的成本,适合对升降速度和精度要求不高的应用场景。而液压系统驱动的立柱则可以提供更高的升降速度和更精确的位置控制,适用于对升降要求更高的场景。立柱还可以配备传感器和安全装置,以便监测和保护机器人在升降过程中的安全。例如,可以采用重量传感器来监测机器人的负载情况,以确保不超过立柱承载能力的范围。
2、但现有装置仍存在以下缺陷:
3、现有装置在使用时,传统同类结构使用钢材立柱质量重、外观不够美观的缺点;传统同类结构使用钢材立柱焊接结构复杂、变型量大的缺陷,因此我们需要提出一种物流机器人升降机构用铝型材立柱。
技术实现思路
1、本实用新型的目的在于提供一种物流机器人升降机构用铝型材立柱,铝型材立柱采用挤压工艺制作,重量轻、强度高。立柱设计为型腔结构,在满足相关结构使用强度的前提下降低材料重量。立柱设计有c型槽结构,作为升降机构的滚轮运行滚道。c型槽结构采用模具一体成型,尺寸稳定,保证升降动作平顺。立柱设计有国标连接槽结构,左右立柱通过标准铝型材、一字连接条和角件连接成一个封闭的框架结构,结构简单、连接牢靠。立柱设计有空腔避让结构,升降机构的同步带可通过空腔进行上下带轮的环绕连接,既防护了同步带也保证了整体外观的美观。铝型材立柱结构集成度高,功能完善,制造精度高,生产效率高,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种物流机器人升降机构用铝型材立柱,包括柱体,两个所述柱体的内部均开设有c型槽,所述c型槽的内部设置有倒角,两个所述柱体的内部均开设有第一减重槽,两个所述柱体的内部均开设有第二减重槽,两个所述柱体的内部均开设有第三减重槽,两个所述柱体的内部均开设有十字槽,两个所述柱体的四角均设置有第一圆角,两个所述柱体的内部均开设有避让槽,所述避让槽的内部设置有第二圆角;
4、所述避让槽的内部设置有对c型槽位置进行支撑的支撑组件;
5、两个所述柱体上均设置有用于两个柱体连接的连接组件。
6、优选的,所述支撑组件包括滑动安装于避让槽内部的多个支撑板,多个所述支撑板的内部开设有通孔,所述通孔的内部设置有固定螺栓,两个所述柱体的内部均开设有多个螺纹槽,多个所述螺纹槽与多个固定螺栓螺纹连接。
7、优选的,所述c型槽的内部滚动连接有滚轮,所述滚轮的侧壁上设置有移动架,所述移动架的外侧固定连接有安装架。
8、优选的,所述移动架由多个板材栓接而成。
9、优选的,所述安装架由两个杆件和一个板件组成,且所述板件的内部开设有安装孔。
10、优选的,所述连接组件包括滑动连接于十字槽内部的十字杆,所述十字杆的侧壁上固定连接有连接条,所述连接条的上端抵接有角件。
11、优选的,所述连接条与柱体滑动连接,且所述连接条的两端均固定连接有十字杆。
12、优选的,所述角件为一个壳体,所述角件栓接与柱体外侧。
13、与现有技术相比,本实用新型的有益效果是:
14、本实用新型通过铝型材立柱采用挤压工艺制作,重量轻、强度高,立柱设计为型腔结构,在满足相关结构使用强度的前提下降低材料重量,立柱设计有c型槽结构,作为升降机构的滚轮运行滚道,c型槽结构采用模具一体成型,尺寸稳定,保证升降动作平顺,立柱设计有国标连接槽结构,左右立柱通过标准铝型材、一字连接条和角件连接成一个封闭的框架结构,结构简单、连接牢靠,立柱设计有空腔避让结构,升降机构的同步带可通过空腔进行上下带轮的环绕连接,既防护了同步带也保证了整体外观的美观,铝型材立柱结构集成度高,功能完善,制造精度高,生产效率高。
技术特征:
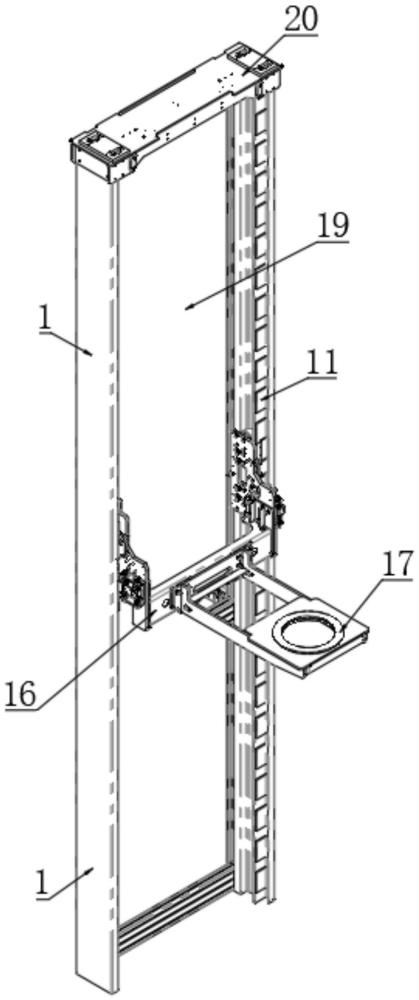
1.一种物流机器人升降机构用铝型材立柱,包括两个柱体(1),其特征在于:两个所述柱体(1)的内部均开设有c型槽(2),所述c型槽(2)的内部设置有倒角(3),两个所述柱体(1)的内部均开设有第一减重槽(4),两个所述柱体(1)的内部均开设有第二减重槽(5),两个所述柱体(1)的内部均开设有第三减重槽(6),两个所述柱体(1)的内部均开设有十字槽(7),两个所述柱体(1)的四角均设置有第一圆角(8),两个所述柱体(1)的内部均开设有避让槽(9),所述避让槽(9)的内部设置有第二圆角(10);
2.根据权利要求1所述的一种物流机器人升降机构用铝型材立柱,其特征在于:所述支撑组件包括滑动安装于避让槽(9)内部的多个支撑板(11),多个所述支撑板(11)的内部开设有通孔(12),所述通孔(12)的内部设置有固定螺栓(13),两个所述柱体(1)的内部均开设有多个螺纹槽(14),多个所述螺纹槽(14)与多个固定螺栓(13)螺纹连接。
3.根据权利要求1所述的一种物流机器人升降机构用铝型材立柱,其特征在于:所述c型槽(2)的内部滚动连接有滚轮(15),所述滚轮(15)的侧壁上设置有移动架(16),所述移动架(16)的外侧固定连接有安装架(17)。
4.根据权利要求3所述的一种物流机器人升降机构用铝型材立柱,其特征在于:所述移动架(16)由多个板材栓接而成。
5.根据权利要求3所述的一种物流机器人升降机构用铝型材立柱,其特征在于:所述安装架(17)由两个杆件和一个板件组成,且所述板件的内部开设有安装孔。
6.根据权利要求1所述的一种物流机器人升降机构用铝型材立柱,其特征在于:所述连接组件包括滑动连接于十字槽(7)内部的十字杆(18),所述十字杆(18)的侧壁上固定连接有连接条(19),所述连接条(19)的上端抵接有角件(20)。
7.根据权利要求6所述的一种物流机器人升降机构用铝型材立柱,其特征在于:所述连接条(19)与柱体(1)滑动连接,且所述连接条(19)的两端均固定连接有十字杆(18)。
8.根据权利要求6所述的一种物流机器人升降机构用铝型材立柱,其特征在于:所述角件(20)栓接与柱体(1)外侧。
技术总结
本技术公开了一种物流机器人升降机构用铝型材立柱,包括两个柱体,本技术通过铝型材立柱采用挤压工艺制作,重量轻、强度高,立柱设计为型腔结构,在满足相关结构使用强度的前提下降低材料重量,立柱设计有C型槽结构,作为升降机构的滚轮运行滚道,C型槽结构采用模具一体成型,尺寸稳定,保证升降动作平顺,立柱设计有国标连接槽结构,左右立柱通过标准铝型材、一字连接条和角件连接成一个封闭的框架结构,结构简单、连接牢靠,立柱设计有空腔避让结构,升降机构的同步带可通过空腔进行上下带轮的环绕连接,既防护了同步带也保证了整体外观的美观,铝型材立柱结构集成度高,功能完善,制造精度高,生产效率高。
技术研发人员:胡小龙,汪巍蔷,杭哲,陈丽丽,黄庆光,陈新安
受保护的技术使用者:浙江中扬立库技术有限公司
技术研发日:20240530
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!