可翻面式链轮自动搬运机的制作方法
本技术涉及链轮加工设备领域,尤其是可翻面式链轮自动搬运机。
背景技术:
1、链轮在进行生产加工的时候,需要将其放置到特定工位进行加工,而现有的链轮自动搬运机构只能将齿轮进行移动而无法翻转其朝向。
技术实现思路
1、为了克服现有的链轮自动搬运机构无法翻面的不足,本实用新型提供了可翻面式链轮自动搬运机。
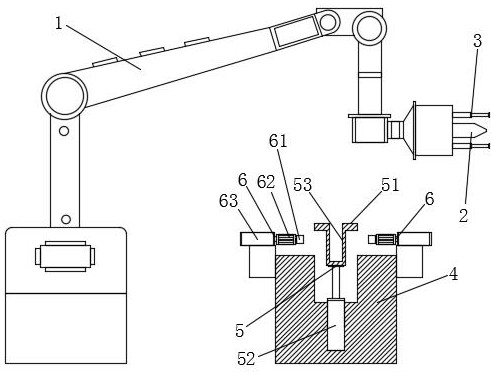
2、本实用新型解决其技术问题所采用的技术方案是:一种可翻面式链轮自动搬运机,包括多轴机器人、链轮导正杆、链轮抓取部、工作台、链轮抬升机构、链轮翻面机构,所述多轴机器人上安装有链轮导正杆和链轮抓取部,多轴机器人下方设有工作台,工作台内设有凹槽,凹槽内安装有链轮抬升机构,工作台的台面上安装有链轮翻面机构。
3、根据本实用新型的另一个实施例,进一步包括所述链轮导正杆的端部设有锥形部。
4、根据本实用新型的另一个实施例,进一步包括所述链轮抓取部包括弹簧杆和吸盘,多轴机器人通过弹簧杆和吸盘连接在一起,数个链轮抓取部以链轮导正杆为圆心均匀分布在多轴机器人上。
5、根据本实用新型的另一个实施例,进一步包括所述链轮抬升机构包括抬升块、升降电缸,抬升块固定在升降电缸的活塞杆上。
6、根据本实用新型的另一个实施例,进一步包括所述抬升块内设有用于插入链轮导正杆的插槽。
7、根据本实用新型的另一个实施例,进一步包括所述链轮翻面机构包括夹板、夹板旋转机构、水平气缸,两个相对的水平气缸固定在工作台的台面上,链轮抬升机构位于两个水平气缸之间,水平气缸的活塞杆固定在夹板旋转机构的机体上,夹板旋转机构的输出轴固定在夹板上。
8、根据本实用新型的另一个实施例,进一步包括所述夹板为c形板体。
9、根据本实用新型的另一个实施例,进一步包括所述夹板旋转机构为电机。
10、本实用新型的有益效果是,该实用新型通过带有链轮导正杆和链轮抓取部的多轴机器人来转移链轮,通过链轮抬升机构和链轮翻面机构将工作台上的链轮进行翻面。
技术特征:
1.一种可翻面式链轮自动搬运机,其特征是,包括多轴机器人(1)、链轮导正杆(2)、链轮抓取部(3)、工作台(4)、链轮抬升机构(5)、链轮翻面机构(6),所述多轴机器人(1)上安装有链轮导正杆(2)和链轮抓取部(3),多轴机器人(1)下方设有工作台(4),工作台(4)内设有凹槽,凹槽内安装有链轮抬升机构(5),工作台(4)的台面上安装有链轮翻面机构(6)。
2.根据权利要求1所述的可翻面式链轮自动搬运机,其特征是,所述链轮导正杆(2)的端部设有锥形部。
3.根据权利要求1所述的可翻面式链轮自动搬运机,其特征是,所述链轮抓取部(3)包括弹簧杆和吸盘,多轴机器人(1)通过弹簧杆和吸盘连接在一起,数个链轮抓取部(3)以链轮导正杆(2)为圆心均匀分布在多轴机器人(1)上。
4.根据权利要求1所述的可翻面式链轮自动搬运机,其特征是,所述链轮抬升机构(5)包括抬升块(51)、升降电缸(52),抬升块(51)固定在升降电缸(52)的活塞杆上。
5.根据权利要求4所述的可翻面式链轮自动搬运机,其特征是,所述抬升块(51)内设有用于插入链轮导正杆(2)的插槽(53)。
6.根据权利要求1所述的可翻面式链轮自动搬运机,其特征是,所述链轮翻面机构(6)包括夹板(61)、夹板旋转机构(62)、水平气缸(63),两个相对的水平气缸(63)固定在工作台(4)的台面上,链轮抬升机构(5)位于两个水平气缸(63)之间,水平气缸(63)的活塞杆固定在夹板旋转机构(62)的机体上,夹板旋转机构(62)的输出轴固定在夹板(61)上。
7.根据权利要求6所述的可翻面式链轮自动搬运机,其特征是,所述夹板(61)为c形板体。
8.根据权利要求6所述的可翻面式链轮自动搬运机,其特征是,所述夹板旋转机构(62)为电机。
技术总结
本技术涉及链轮加工设备领域,尤其是可翻面式链轮自动搬运机。该搬运机包括多轴机器人、链轮导正杆、链轮抓取部、工作台、链轮抬升机构、链轮翻面机构,所述多轴机器人上安装有链轮导正杆和链轮抓取部,多轴机器人下方设有工作台,工作台内设有凹槽,凹槽内安装有链轮抬升机构,工作台的台面上安装有链轮翻面机构。该技术通过带有链轮导正杆和链轮抓取部的多轴机器人来转移链轮,通过链轮抬升机构和链轮翻面机构将工作台上的链轮进行翻面。
技术研发人员:郭力英
受保护的技术使用者:常州凯捷链传动有限公司
技术研发日:20240612
技术公布日:2025/3/24
- 还没有人留言评论。精彩留言会获得点赞!