货架及仓储系统的制作方法
本申请属于仓储领域,具体涉及一种货架及仓储系统。
背景技术:
1、随着科技的发展,物流的发展越来越快,需要将货物放置在货架上。通常,货架上设置有导轨等结构,转运机器人在运输货物之后,转运机器人沿着货架上的导轨爬升,从而转运机器人在爬升至适当位置之后将货物运送至货架上。但相关技术中,货架上的导轨等结构导致转运机器人的爬升效率较低。
技术实现思路
1、本申请实施例的目的是提供一种货架及仓储系统,至少解决货架上的导轨等结构导致转运机器人的爬升效率较低的问题。
2、第一方面,本申请实施例提供了一种货架,所述货架包括:货架主体以及爬升结构;
3、所述爬升结构包括支撑主体以及多个滚子,所述支撑主体固定于所述货架主体,且所述支撑主体沿所述货架主体的高度方向延伸,所述支撑主体上设置有爬升槽;
4、所述爬升槽沿所述货架主体的高度方向延伸,所述爬升槽的槽口背离所述货架主体,多个所述滚子沿所述货架主体的高度方向间隔分布,多个所述滚子用于使转运机器人沿所述货架主体的方向爬升或下降。
5、可选地,所述支撑主体包括第一支撑板、第二支撑板以及背板;
6、所述第一支撑板与所述第二支撑板间隔分布,所述背板位于所述第一支撑板与所述第二支撑板之间,且所述背板分别连接所述第一支撑板与所述第二支撑板,所述背板、所述第一支撑板以及所述第二支撑板围合形成所述爬升槽,所述滚子分别与所述第一支撑板以及所述第二支撑板转动连接,以使所述滚子相对所述爬升槽可转动;
7、其中,所述背板、所述第一支撑板以及所述第二支撑板均沿所述货架主体的高度方向延伸,所述背板、所述第一支撑板以及所述第二支撑板中的至少一者与所述货架主体固定连接。
8、可选地,所述支撑主体还包括第一固定板以及第二固定板;
9、所述第一固定板固定于所述第一支撑板,所述第二固定板固定于所述第二支撑板,且所述第一固定板以及所述第二固定板均位于所述爬升槽的外部,所述第一固定板以及所述第二固定板均位于所述爬升槽的槽口处;
10、其中,所述第一固定板、所述第二固定板均沿所述货架主体的高度方向延伸。
11、可选地,所述第一支撑板具有靠近所述货架主体的底部的第一端和远离所述货架主体的底部的第二端,所述第一固定板的第一端与所述第一支撑板的第一端在所述货架的高度方向上错位,且所述第一支撑板的第一端靠近所述货架主体的底部,所述第一固定板的第一端远离所述货架主体的底部;
12、所述第二支撑板具有靠近所述货架主体的底部的第一端和远离所述货架主体的底部的第二端,所述第二固定板的第一端与所述第二支撑板的第一端在所述货架的高度方向上错位,且所述第二支撑板的第一端靠近所述货架主体的底部,所述第二固定板的第一端远离所述货架主体的底部。
13、可选地,所述货架还包括导向件;
14、所述导向件固定于所述货架主体,且所述导向件靠近所述第一支撑板的第一端,所述导向件上设置有导向槽,所述导向槽的开口背离所述货架主体,所述导向槽与所述爬升槽沿所述货架主体的高度方向连通,所述导向槽的开口的尺寸小于所述爬升槽的开口的尺寸。
15、可选地,所述货架还包括多个减震件;
16、所述支撑主体与所述货架主体之间具有间隙,多个所述减震件均位于所述间隙中,且多个所述减震件沿所述货架主体的高度方向间隔分布,所述减震件分别连接所述支撑主体以及所述货架主体。
17、可选地,所述减震件为橡胶减震件、硅胶减震件中的至少一者。
18、可选地,所述减震件的硬度大于45shorea。
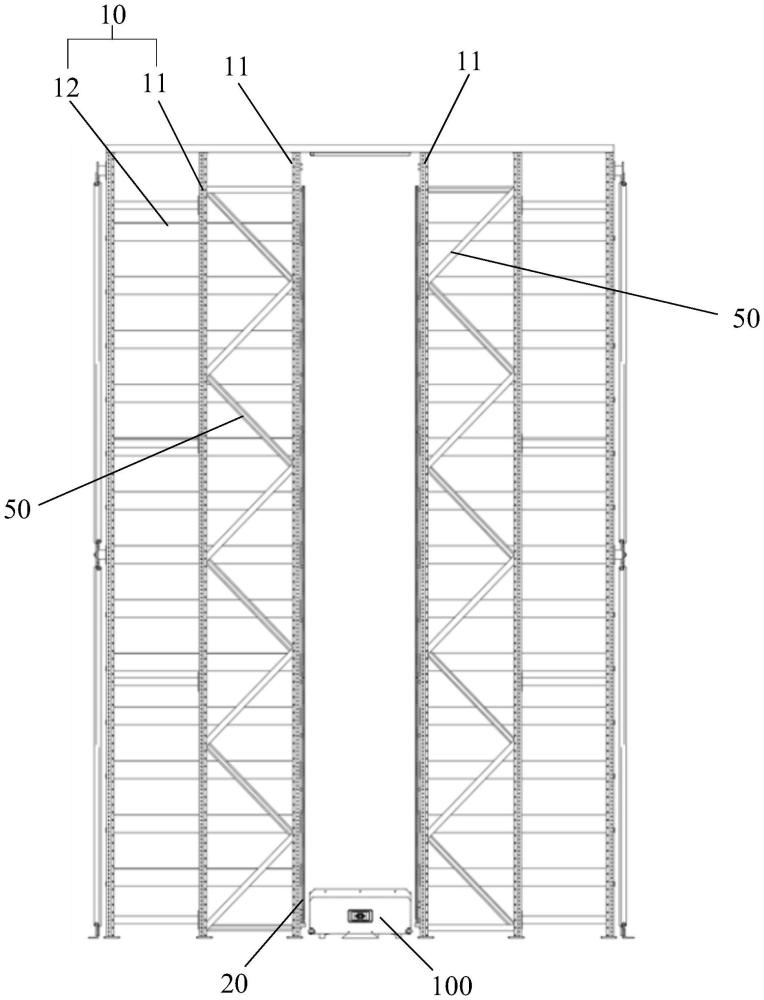
19、可选地,所述货架主体包括多个立柱以及货架板;
20、多个所述立柱间隔分布,且多个所述立柱围合形成容纳空间,所述货架板位于所述容纳空间,且所述货架板与所述立柱连接,所述支撑主体固定于所述立柱,且所述支撑主体位于所述容纳空间的外部。
21、可选地,所述货架还包括多个加强件;
22、至少两个相邻的所述立柱之间设置有多个所述加强件,且所述加强件相对的两端分别连接于所述立柱。
23、可选地,所述滚子通过转轴转动连接于所述爬升槽。
24、第二方面,本申请实施例提供了一种仓储系统,其特征在于,所述仓储系统包括转运机器人以及上述第一方面中任一项所述货架;
25、所述转运机器人具有转运齿轮,所述转运齿轮用于与多个所述滚子啮合,以沿多个所述滚子的分布方向爬升或下降,向所述货架上转运货物。
26、在本申请实施例中,由于支撑主体固定于货架主体,因此,货架主体相当于固定支撑主体,使得支撑主体的位置固定,不易晃动。由于支撑主体沿货架主体的高度方向延伸,支撑主体上设置有爬升槽,多个滚子沿货架主体的高度方向间隔分布,因此,在需要转运机器人运输货物至货架主体上时,便可以使得转运机器人沿着爬升结构爬升,即转运机器人的转运齿轮上的轮齿嵌设于相邻两个滚子之间的间隙中,相当于转运机器人的转运齿轮与滚子啮合,在转运机器人的转运齿轮在转动时,转运齿轮便沿着货架主体的高度方向移动,转运齿轮的轮齿便会滚子接触,滚子对转运齿轮进行支撑,便可以确保转运齿轮的转动,进而确保转运齿轮可以有效爬升。也即是,在本申请实施例中,通过将支撑主体固定于货架主体上,且支撑主体上的爬升槽中间隔分布多个滚子,从而可以将转运机器人的转运齿轮与多个滚子啮合,在转运齿轮的轮齿嵌设于滚子之间的间隙之后,滚子便可以对转运齿轮起到支撑作用,确保了转运齿轮可以有效爬升,进而可以提高转运机器人沿着爬升结构爬升的效率。
技术特征:
1.一种货架,其特征在于,所述货架包括:货架主体(10)以及爬升结构(20);
2.根据权利要求1所述的货架,其特征在于,所述支撑主体(21)包括第一支撑板(211)、第二支撑板(212)以及背板(213);
3.根据权利要求2所述的货架,其特征在于,所述支撑主体(21)还包括第一固定板(214)以及第二固定板(215);
4.根据权利要求3所述的货架,其特征在于,所述第一支撑板(211)具有靠近所述货架主体(10)的底部的第一端和远离所述货架主体(10)的底部的第二端,所述第一固定板(214)的第一端与所述第一支撑板(211)的第一端在所述货架的高度方向(z)上错位,且所述第一支撑板(211)的第一端靠近所述货架主体(10)的底部,所述第一固定板(214)的第一端远离所述货架主体(10)的底部;
5.根据权利要求4所述的货架,其特征在于,所述货架还包括导向件(30);
6.根据权利要求1所述的货架,其特征在于,所述货架还包括多个减震件(40);
7.根据权利要求6所述的货架,其特征在于,所述减震件(40)为橡胶减震件、硅胶减震件中的至少一者。
8.根据权利要求7所述的货架,其特征在于,所述减震件(40)的硬度大于45shorea。
9.根据权利要求1-8中任一项所述的货架,其特征在于,所述货架主体(10)包括多个立柱(11)以及货架板(12);
10.根据权利要求9所述的货架,其特征在于,所述货架还包括多个加强件(50);
11.根据权利要求1-8中任一项所述的货架,其特征在于,所述滚子(22)通过转轴(220)转动连接于所述爬升槽(210)。
12.一种仓储系统,其特征在于,所述仓储系统包括转运机器人(100)以及权利要求1-11中任一项所述货架;
技术总结
本申请公开了一种货架及仓储系统,属于仓储领域。该货架包括:货架主体以及爬升结构;爬升结构包括支撑主体以及多个滚子,支撑主体固定于货架主体,且支撑主体沿货架主体的高度方向延伸,支撑主体上设置有爬升槽;爬升槽沿货架主体的高度方向延伸,爬升槽的槽口背离货架主体,多个滚子沿货架主体的高度方向间隔分布,多个滚子用于使转运机器人沿货架主体的方向爬升或下降。
技术研发人员:姜龙,关利东,樊星,王世恩
受保护的技术使用者:旷视格图(苏州)智能装备有限公司
技术研发日:20240702
技术公布日:2025/4/6
- 还没有人留言评论。精彩留言会获得点赞!