一种牵引式机器人的制作方法
本技术涉及机器人,具体为一种牵引式机器人。
背景技术:
1、牵引式机器人是一种隐藏在载物台车底部的自动搬运设备,专门设计用于牵引载有货物的车辆。这种机器人因其紧凑的设计而能够在有限的空间内灵活运动,通常用于成批的货物搬运或作为生产线中的一个自动化环节。
2、现有的牵引式机器人大多不具备卸料装置,当物料到点指定地点时,无法进行自动卸料,需要人工配合外部卸料装置进行卸料,对卸料地点是否配备卸料装置有一定要求,使用上存在一定局限性,且人工卸料一定程度上降低了输送效率。
技术实现思路
1、本部分的目的在于概述本实用新型的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本申请的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
2、鉴于上述和/或现有牵引式机器人中存在的问题,提出了本实用新型。
3、因此,本实用新型的目的是提供一种牵引式机器人,在使用过程中进行卸货时,驱动电机带动丝杠旋转,使第一挡板移动至机器人主体一侧,将外部托盘放置在机器人主体尾部,在液压缸的作用下,推动固定架,在连杆的作用下,翻板翻转发生倾斜,进行卸料,解决了现有的牵引式机器人大多不具备卸料装置,当物料到点指定地点时,无法进行自动卸料,需要人工配合外部卸料装置进行卸料,对卸料地点是否配备卸料装置有一定要求,使用上存在一定局限性,且人工卸料一定程度上降低了输送效率的问题。
4、为解决上述技术问题,根据本实用新型的一个方面,本实用新型提供了如下技术方案:
5、一种牵引式机器人,其包括:
6、机器人主体,所述机器人主体内部设置有驱动机构,所述机器人主体顶部中心设置有第一通槽,所述机器人主体内部底侧固定连接有固定板,所述固定板一侧固定连接有液压缸,所述液压缸的动力输出端固定连接有固定架,所述固定架两侧均设置有第一限位块,所述机器人主体内部底侧设置有多个限位凸台,所述固定架位于多个限位凸台之间,所述机器人主体一侧横向固定连接有旋转轴,所述旋转轴外侧活动连接有翻板,所述翻板底部活动连接有连杆,所述连杆一端与固定架一侧活动连接,所述机器人主体顶部设置有防坠机构。
7、作为本实用新型所述的一种牵引式机器人的一种优选方案,其中,所述防坠机构包括第一挡板,所述第一挡板底部一侧设置有第一凸台,所述机器人主体一侧设置有第一限位槽,所述第一凸台位于第一限位槽内,所述机器人主体一侧设置有第二通槽,所述第一挡板一端两侧均设置有第二限位槽,所述第二限位槽位于第二通槽内。
8、作为本实用新型所述的一种牵引式机器人的一种优选方案,其中,所述第一挡板底部设置有内螺纹通孔,所述机器人主体一端两侧分别设置有第二凸台和第三凸台,所述第二凸台一侧固定连接有驱动电机,所述驱动电机的动力输出端贯穿第二凸台固定连接有丝杠,所述丝杠一端与第三凸台一侧活动连接,所述丝杠的外部螺纹与内螺纹通孔啮合。
9、作为本实用新型所述的一种牵引式机器人的一种优选方案,其中,所述机器人主体顶部两侧均固定连接有第二挡板,所述机器人主体一侧设置为斜面。
10、作为本实用新型所述的一种牵引式机器人的一种优选方案,其中,所述驱动机构包括双头驱动电机,所述双头驱动电机的多个动力输出端均贯穿机器人主体一侧固定连接有驱动轮,所述机器人主体底部两侧均活动连接有从动轮,所述驱动轮和从动轮外侧均固定连接有防滑胎,所述防滑胎中部设置有第一凹槽,所述第一凹槽底部活动连接有轨道,所述机器人主体内侧底部固定连接有蓄电池,所述双头驱动电机与蓄电池电性连接。
11、作为本实用新型所述的一种牵引式机器人的一种优选方案,其中,所述轨道两侧顶部均设置有第二限位块,所述第二限位块位于第一凹槽内,所述第二限位块两侧均设置有第二凹槽,所述驱动轮和从动轮两侧均位于第二凹槽内部。
12、作为本实用新型所述的一种牵引式机器人的一种优选方案,其中,所述机器人主体一侧设置有充电口,所述充电口与蓄电池电性连接。
13、作为本实用新型所述的一种牵引式机器人的一种优选方案,其中,所述机器人主体一侧固定连接有摄像头,所述机器人主体一侧固定连接有多个照明灯,所述照明灯和摄像头均与蓄电池电性连接。
14、与现有技术相比,本实用新型具有的有益效果是:进行卸货时,驱动电机带动丝杠旋转,使第一挡板移动至机器人主体一侧,将外部托盘放置在机器人主体尾部,在液压缸的作用下,推动固定架,在连杆的作用下,翻板翻转发生倾斜,进行卸料,解决了现有的牵引式机器人大多不具备卸料装置,当物料到点指定地点时,无法进行自动卸料,需要人工配合外部卸料装置进行卸料,对卸料地点是否配备卸料装置有一定要求,使用上存在一定局限性,且人工卸料一定程度上降低了输送效率的问题。
技术特征:
1.一种牵引式机器人,其特征在于,包括机器人主体(1),所述机器人主体(1)内部设置有驱动机构,所述机器人主体(1)顶部中心设置有第一通槽(19),所述机器人主体(1)内部底侧固定连接有固定板(13),所述固定板(13)一侧固定连接有液压缸(14),所述液压缸(14)的动力输出端固定连接有固定架(15),所述固定架(15)两侧均设置有第一限位块,所述机器人主体(1)内部底侧设置有多个限位凸台(16),所述固定架(15)位于多个限位凸台(16)之间,所述机器人主体(1)一侧横向固定连接有旋转轴(25),所述旋转轴(25)外侧活动连接有翻板(2),所述翻板(2)底部活动连接有连杆(17),所述连杆(17)一端与固定架(15)一侧活动连接,所述机器人主体(1)顶部设置有防坠机构。
2.根据权利要求1所述的一种牵引式机器人,其特征在于,所述防坠机构包括第一挡板(3),所述第一挡板(3)底部一侧设置有第一凸台(27),所述机器人主体(1)一侧设置有第一限位槽(18),所述第一凸台(27)位于第一限位槽(18)内,所述机器人主体(1)一侧设置有第二通槽(24),所述第一挡板(3)一端两侧均设置有第二限位槽(28),所述第二限位槽(28)位于第二通槽(24)内。
3.根据权利要求2所述的一种牵引式机器人,其特征在于,所述第一挡板(3)底部设置有内螺纹通孔(29),所述机器人主体(1)一端两侧分别设置有第二凸台(20)和第三凸台(21),所述第二凸台(20)一侧固定连接有驱动电机(22),所述驱动电机(22)的动力输出端贯穿第二凸台(20)固定连接有丝杠(23),所述丝杠(23)一端与第三凸台(21)一侧活动连接,所述丝杠(23)的外部螺纹与内螺纹通孔(29)啮合。
4.根据权利要求3所述的一种牵引式机器人,其特征在于,所述机器人主体(1)顶部两侧均固定连接有第二挡板(10),所述机器人主体(1)一侧设置为斜面(26)。
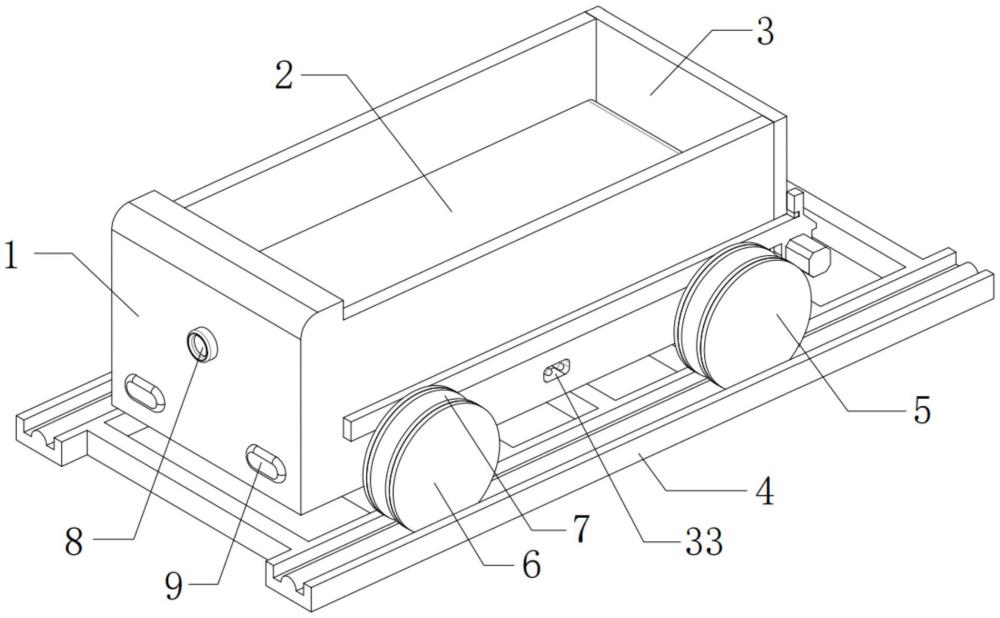
5.根据权利要求4所述的一种牵引式机器人,其特征在于,所述驱动机构包括双头驱动电机(11),所述双头驱动电机(11)的多个动力输出端均贯穿机器人主体(1)一侧固定连接有驱动轮(6),所述机器人主体(1)底部两侧均活动连接有从动轮(5),所述驱动轮(6)和从动轮(5)外侧均固定连接有防滑胎(7),所述防滑胎(7)中部设置有第一凹槽,所述第一凹槽底部活动连接有轨道(4),所述机器人主体(1)内侧底部固定连接有蓄电池(12),所述双头驱动电机(11)与蓄电池(12)电性连接。
6.根据权利要求5所述的一种牵引式机器人,其特征在于,所述轨道(4)两侧顶部均设置有第二限位块(32),所述第二限位块(32)位于第一凹槽内,所述第二限位块(32)两侧均设置有第二凹槽(31),所述驱动轮(6)和从动轮(5)两侧均位于第二凹槽(31)内部。
7.根据权利要求6所述的一种牵引式机器人,其特征在于,所述机器人主体(1)一侧设置有充电口(33),所述充电口(33)与蓄电池(12)电性连接。
8.根据权利要求7所述的一种牵引式机器人,其特征在于,所述机器人主体(1)一侧固定连接有摄像头(8),所述机器人主体(1)一侧固定连接有多个照明灯(9),所述照明灯(9)和摄像头(8)均与蓄电池(12)电性连接。
技术总结
本技术公开一种牵引式机器人,其包括机器人主体,机器人主体内部设置有驱动机构,机器人主体顶部中心设置有第一通槽,机器人主体内部底侧固定连接有固定板,固定板一侧固定连接有液压缸,液压缸的动力输出端固定连接有固定架,固定架两侧均设置有第一限位块,机器人主体内部底侧设置有多个限位凸台,在液压缸的作用下,推动固定架,在连杆的作用下,翻板翻转发生倾斜,进行卸料,解决了现有的牵引式机器人大多不具备卸料装置,当物料到点指定地点时,无法进行自动卸料,需要人工配合外部卸料装置进行卸料,对卸料地点是否配备卸料装置有一定要求,使用上存在一定局限性,且人工卸料一定程度上降低了输送效率的问题。
技术研发人员:俞瑞富,吴魏,马帅,方运祥,管哲,任昊,陈旭,胡子宏
受保护的技术使用者:明光利拓智能科技有限公司
技术研发日:20240709
技术公布日:2025/4/14
- 还没有人留言评论。精彩留言会获得点赞!