一种基于图像识别的海关物流转运设备的制作方法
本技术涉及图像识别搬运,尤其涉及一种基于图像识别的海关物流转运设备。
背景技术:
1、随着社会经济的发展,人们生活节奏日益加快,人们对效率的追求也越来越高,现在物流系统的高速发展给人们带来了极大的便利,为了提高货品的运输效率,无人运输车逐渐应用到市场中。
2、在进行货物搬运上运输车时,通常需要人工来对货物进行出库、搬运、码货,费时费力,效率低下且自动化程度较低。
3、为此,有必要提出一种基于图像识别的海关物流转运设备来自动对货物进行出库搬运码货,以提高搬运货物过程的自动化程度。
技术实现思路
1、为了解决上述问题,本实用新型提出一种基于图像识别的海关物流转运设备来自动对货物进行出库搬运码货,以提高搬运货物过程的自动化程度。
2、本实用新型通过以下技术方案实现的:
3、本实用新型提出一种基于图像识别的海关物流转运设备,包括载物小车、物料搬移机械臂,所述载物小车后方设有物料放置栏,所述物料搬移机械臂安装于所述物料放置栏内并从上方凸出于所述物料放置栏,所述物料搬移机械臂包括位移臂组件、夹持机构、第一摄像装置,所述位移臂组件的一端固定连接于所述物料放置栏内,所述位移臂组件的另一端与所述夹持机构的顶部固定连接,所述第一摄像装置固定连接于所述夹持机构的底部并与所述夹持机构的朝向方向相同,所述位移臂组件、所述夹持机构、所述第一摄像装置均与所述载物小车电连接;所述载物小车的后方设有第二摄像装置,所述第二摄像装置竖直设置并呈倾角斜向下朝向所述物料放置栏;所述物料放置栏的后方设有竖直翻转开合的电动门机构。
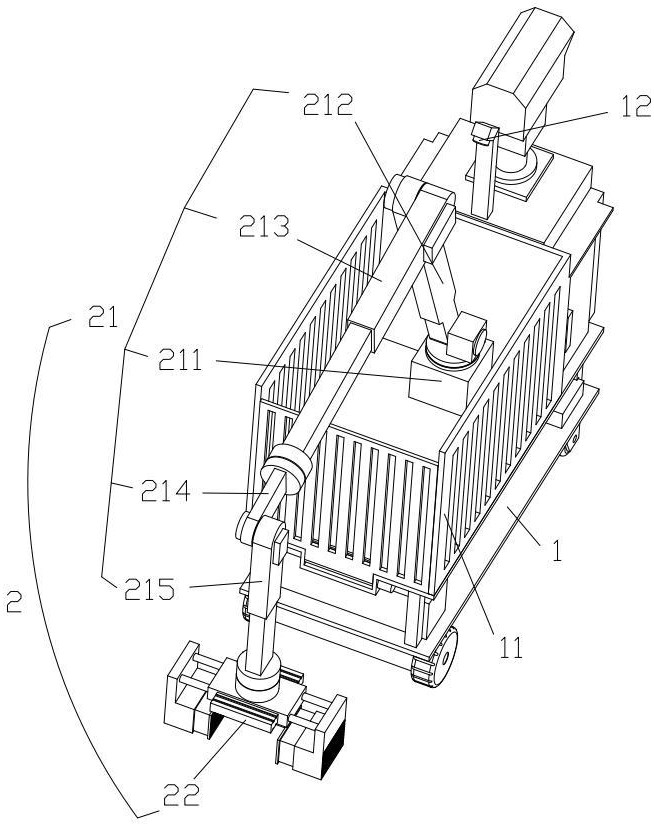
4、进一步的,所述位移臂组件包括xy转动底座、定距连接臂、第一伸缩臂、转动连接臂、第二伸缩臂,所述xy转动底座的底部固定连接于所述物料放置栏内,所述定距连接臂的一端与所述xy转动底座的顶部转动连接,所述第一伸缩臂的一端与所述定距连接臂的另一端转动连接,所述转动连接臂的一端与所述第一伸缩臂的另一端固定连接,所述第二伸缩臂的一端与所述转动连接臂的另一端转动连接,所述第二伸缩臂的另一端与所述夹持机构的顶部固定连接,所述xy转动底座、所述定距连接臂、所述第一伸缩臂、所述转动连接臂、所述第二伸缩臂均与所述载物小车电连接。
5、进一步的,所述第一伸缩臂包括第一固定臂、第一活动臂、第一电机,所述第一固定臂的一端与所述定距连接臂的另一端转动连接,所述第一活动臂与所述第一固定臂的另一端滑动连接,所述第一电机固定连接于所述第一固定臂内并通过丝杆与所述第一活动臂形成丝杆传动连接,所述第一电机的一侧凸出于所述第一固定臂外,所述第一电机与所述载物小车电连接;所述第二伸缩臂与所述第一伸缩臂结构相同。
6、进一步的,所述转动连接臂的一端设有第一转动电机端,所述第一转动电机端与所述第一伸缩臂的另一端固定连接,所述第一转动电机端与所述载物小车电连接。
7、进一步的,所述夹持机构包括第二转动电机端、双头气缸夹持组件,所述第二转动电机端的一端固定连接于所述双头气缸夹持组件的顶部,所述第一摄像装置固定连接于所述双头气缸夹持组件的底部并与所述双头气缸夹持组件的朝向相同,所述第二转动电机端的另一端与所述第二伸缩臂的另一端固定连接,所述第二转动电机端、所述双头气缸夹持组件均与所述载物小车电连接。
8、进一步的,所述双头气缸夹持组件包括双头气缸、两个弹性夹持组件,所述第二转动电机端的一端固定连接于所述双头气缸的顶部,所述第一摄像装置固定连接于所述双头气缸的底部,两个所述弹性夹持组件的一端分别固定连接于所述双头气缸两侧的推杆上并对称设置,两个所述弹性夹持组件的另一端均向下延伸,所述第一摄像装置位于两个所述弹性夹持组件之间,所述双头气缸与所述载物小车电连接。
9、进一步的,所述弹性夹持组件包括固定夹持臂、弹性件、滑动夹持块,所述固定夹持臂的一端与所述双头气缸一侧的推杆呈90度固定连接,所述固定夹持臂的另一端设有滑动槽,所述滑动夹持块的背部收容于所述滑动槽内并与所述滑动槽的槽壁滑动连接,所述弹性件收容于所述滑动槽内,所述弹性件的一端与所述滑动夹持块的背部抵接,所述弹性件的另一端与所述滑动槽的底壁抵接。
10、进一步的,所述固定夹持臂的另一端外侧设有用于防滑的第一防滑层。
11、本实用新型的有益效果:
12、本实用新型采用载物小车对货物进行运载,物料搬移机械臂对货物进行搬运,位移臂组件用于带动夹持机构进行位移,同时也带动了第一摄像装置进行位移,第一摄像装置则获取夹持机构下方的影像信息,在货物进行搬运时,货物放置在地面上,位移臂组件先带动夹持机构进行上移,使得第一摄像装置获取到更加宽阔的视野,在第一摄像装置确定货物的位置后,位移臂组件则带动夹持机构位移至货物的上方,然后进行竖直下降,在第一摄像装置获取到贴附在货物上方的单号二维码后,则确定该货物出库,然后夹持机构对该货物进行夹持并搬移至物料放置栏内进行放置,第二摄像装置查看物料放置栏内的货物码货情况,且放置时电动门机构向后翻转打开,货物则能够从物料放置栏的后方放入物料放置栏内部,在货物搬运以及码货完成后,电动门机构向前翻转进行关闭,以确保货物在运输的过程中不掉落,后续的货物则也如同上述步骤进行出库,然后夹持搬移至物料放置栏内进行码货,省时省力,自动化程度高;综上所述,本基于图像识别的海关物流转运设备能够自动对货物进行出库搬运码货,有效地提高了搬运货物过程的自动化程度,进而提高了搬运效率。
技术特征:
1.一种基于图像识别的海关物流转运设备,其特征在于,包括载物小车、物料搬移机械臂,所述载物小车后方设有物料放置栏,所述物料搬移机械臂安装于所述物料放置栏内并从上方凸出于所述物料放置栏,所述物料搬移机械臂包括位移臂组件、夹持机构、第一摄像装置,所述位移臂组件的一端固定连接于所述物料放置栏内,所述位移臂组件的另一端与所述夹持机构的顶部固定连接,所述第一摄像装置固定连接于所述夹持机构的底部并与所述夹持机构的朝向方向相同,所述位移臂组件、所述夹持机构、所述第一摄像装置均与所述载物小车电连接;所述载物小车的后方设有第二摄像装置,所述第二摄像装置竖直设置并呈倾角斜向下朝向所述物料放置栏;所述物料放置栏的后方设有竖直翻转开合的电动门机构。
2.根据权利要求1所述的基于图像识别的海关物流转运设备,其特征在于,所述位移臂组件包括xy转动底座、定距连接臂、第一伸缩臂、转动连接臂、第二伸缩臂,所述xy转动底座的底部固定连接于所述物料放置栏内,所述定距连接臂的一端与所述xy转动底座的顶部转动连接,所述第一伸缩臂的一端与所述定距连接臂的另一端转动连接,所述转动连接臂的一端与所述第一伸缩臂的另一端固定连接,所述第二伸缩臂的一端与所述转动连接臂的另一端转动连接,所述第二伸缩臂的另一端与所述夹持机构的顶部固定连接,所述xy转动底座、所述定距连接臂、所述第一伸缩臂、所述转动连接臂、所述第二伸缩臂均与所述载物小车电连接。
3.根据权利要求2所述的基于图像识别的海关物流转运设备,其特征在于,所述第一伸缩臂包括第一固定臂、第一活动臂、第一电机,所述第一固定臂的一端与所述定距连接臂的另一端转动连接,所述第一活动臂与所述第一固定臂的另一端滑动连接,所述第一电机固定连接于所述第一固定臂内并通过丝杆与所述第一活动臂形成丝杆传动连接,所述第一电机的一侧凸出于所述第一固定臂外,所述第一电机与所述载物小车电连接;所述第二伸缩臂与所述第一伸缩臂结构相同。
4.根据权利要求2所述的基于图像识别的海关物流转运设备,其特征在于,所述转动连接臂的一端设有第一转动电机端,所述第一转动电机端与所述第一伸缩臂的另一端固定连接,所述第一转动电机端与所述载物小车电连接。
5.根据权利要求2所述的基于图像识别的海关物流转运设备,其特征在于,所述夹持机构包括第二转动电机端、双头气缸夹持组件,所述第二转动电机端的一端固定连接于所述双头气缸夹持组件的顶部,所述第一摄像装置固定连接于所述双头气缸夹持组件的底部并与所述双头气缸夹持组件的朝向相同,所述第二转动电机端的另一端与所述第二伸缩臂的另一端固定连接,所述第二转动电机端、所述双头气缸夹持组件均与所述载物小车电连接。
6.根据权利要求5所述的基于图像识别的海关物流转运设备,其特征在于,所述双头气缸夹持组件包括双头气缸、两个弹性夹持组件,所述第二转动电机端的一端固定连接于所述双头气缸的顶部,所述第一摄像装置固定连接于所述双头气缸的底部,两个所述弹性夹持组件的一端分别固定连接于所述双头气缸两侧的推杆上并对称设置,两个所述弹性夹持组件的另一端均向下延伸,所述第一摄像装置位于两个所述弹性夹持组件之间,所述双头气缸与所述载物小车电连接。
7.根据权利要求6所述的基于图像识别的海关物流转运设备,其特征在于,所述弹性夹持组件包括固定夹持臂、弹性件、滑动夹持块,所述固定夹持臂的一端与所述双头气缸一侧的推杆呈90度固定连接,所述固定夹持臂的另一端设有滑动槽,所述滑动夹持块的背部收容于所述滑动槽内并与所述滑动槽的槽壁滑动连接,所述弹性件收容于所述滑动槽内,所述弹性件的一端与所述滑动夹持块的背部抵接,所述弹性件的另一端与所述滑动槽的底壁抵接。
8.根据权利要求7所述的基于图像识别的海关物流转运设备,其特征在于,所述固定夹持臂的另一端外侧设有用于防滑的第一防滑层。
技术总结
本技术提出一种基于图像识别的海关物流转运设备,涉及图像识别搬运技术领域,包括载物小车、物料搬移机械臂,载物小车后方设有物料放置栏,物料搬移机械臂安装于物料放置栏内并从上方凸出于物料放置栏,物料搬移机械臂包括位移臂组件、夹持机构、第一摄像装置,位移臂组件的一端固定连接于物料放置栏内,位移臂组件的另一端与夹持机构的顶部固定连接,第一摄像装置固定连接于夹持机构的底部并与夹持机构的朝向方向相同,位移臂组件、夹持机构、第一摄像装置均与载物小车电连接;本基于图像识别的海关物流转运设备能够自动对货物进行出库搬运码货,有效地提高了搬运货物过程的自动化程度,进而提高了搬运效率。
技术研发人员:张磊,黄文欢,黄晨阳,左艳,张纯,杜泽丰,班光耀
受保护的技术使用者:苏州挚途科技有限公司
技术研发日:20240814
技术公布日:2024/9/17
- 还没有人留言评论。精彩留言会获得点赞!