一种袋装物料智能拆垛装置的制作方法
本技术属于智能拆垛的,具体涉及一种袋装物料智能拆垛装置。
背景技术:
1、近年来,卸垛设备不断实现自动化和技术改进,虽然实现了省工省力,但效率仍有提升空间。例如托盘的输送方式单一,需要通过叉车将堆垛在托盘上的物料从仓库或者运输车辆上搬运至拆垛机器人处进行拆垛,然后拆垛机器人通过机械臂将物料卸下,卸完后需要通过叉车将托盘移出,然后放置新的满料托盘,该过程中拆垛机器人需要待机等待,比较浪费时间。
2、因此,需要提供一种针对上述现有技术不足的改进技术方案。
技术实现思路
1、本实用新型的目的是克服上述现有技术中的不足,本实用新型提供了一种。
2、为了实现上述目的,本实用新型提供如下技术方案:
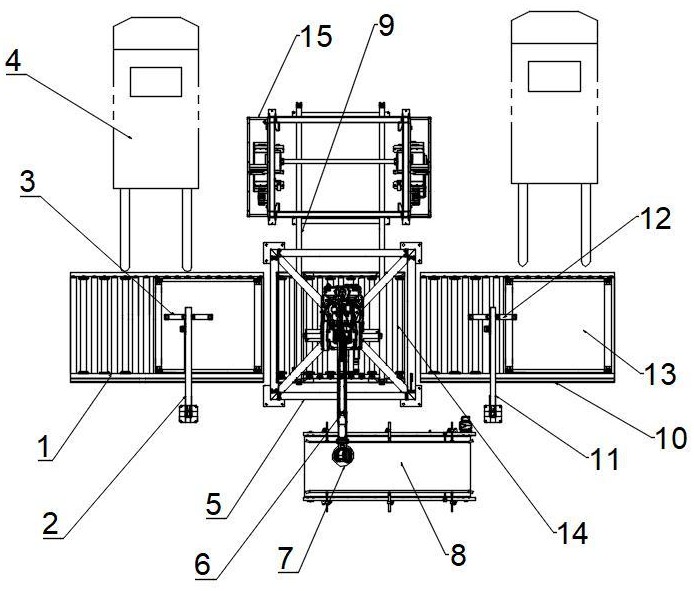
3、一种袋装物料智能拆垛装置,包括呈线性分布的第一传送机和第二传送机,所述第一传送机和第二传送机之间设有顶升移栽机构,所述第一传送机和第二传送机靠近顶升移栽机构的一端分别设有拆垛工位,所述第一传送机和第二传送机的拆垛工位分别设有第一传感器和第二传感器;
4、所述第一传送机和第二传送机之间还设有拆垛机构,所述拆垛机构靠近物料接收机构的起点,所述顶升移栽机构的一侧通过第三传送机连接托盘存放工位。
5、优选的,所述第一传感器、所述第二传感器、所述顶升移栽机构、所述拆垛机构、第一传送机、第二传送机和第三传送机对应连接控制器。
6、优选的,所述第一传送机和第二传送机远离所述顶升移栽机构的一端分别设有第一上料工位和第二上料工位,以放置满料托盘。
7、优选的,所述拆垛机构包括底座、机械手臂和抓取吸盘,所述底座为跨设在顶升移栽机构上方的方形桁架,所述机械手臂对应装配在底座上,所述机械手臂的抓取端设置有抓取吸盘,两个所述拆垛工位和所述物料接收机构与所述机械手臂的间距均小于所述机械手臂的最大抓取行程。
8、优选的,所述托盘存放工位设有对应托盘的码垛机构。
9、优选的,所述顶升移栽机构的两端分别设有对应托盘的限位挡板,所述限位挡板通过液压缸进行驱动,以沿纵向伸出或者缩回所述顶升移栽机构上表面。
10、优选的,所述第一传送机和第二传送机侧部分别设有第一支架和第二支架,所述第一支架和第二支架上端分别通过l形折弯伸向所述第一传送机和第二传送机正上方,以分别连接所述第一传感器和第二传感器。
11、优选的,第一传感器和第二传感器均为3d相机。
12、有益效果:设置两个传送机对拆垛机构进行供给,从而在一个传送机上的托盘拆垛完成后,可以无缝衔接至另一传送机进行拆垛,从而极大的提高了物料的输送效率,拆垛机构与3d相机相结合,实现袋装物料的精准抓取。
技术特征:
1.一种袋装物料智能拆垛装置,其特征在于,包括呈线性分布的第一传送机和第二传送机,所述第一传送机和第二传送机之间设有顶升移栽机构,所述第一传送机和第二传送机靠近顶升移栽机构的一端分别设有拆垛工位,所述第一传送机和第二传送机的拆垛工位分别设有第一传感器和第二传感器;
2.根据权利要求1所述的袋装物料智能拆垛装置,其特征在于,所述第一传感器、所述第二传感器、所述顶升移栽机构、所述拆垛机构、第一传送机、第二传送机和第三传送机对应连接控制器。
3.根据权利要求1所述的袋装物料智能拆垛装置,其特征在于,所述拆垛机构包括底座、机械手臂和抓取吸盘,所述底座为跨设在顶升移栽机构上方的方形桁架,所述机械手臂对应装配在底座上,所述机械手臂的抓取端设置有抓取吸盘,两个所述拆垛工位和所述物料接收机构与所述机械手臂的间距均小于所述机械手臂的最大抓取行程。
4.根据权利要求1所述的袋装物料智能拆垛装置,其特征在于,所述托盘存放工位设有对应托盘的码垛机构。
5.根据权利要求1所述的袋装物料智能拆垛装置,其特征在于,所述顶升移栽机构的两端分别设有对应托盘的限位挡板,所述限位挡板通过液压缸进行驱动,以沿纵向伸出或者缩回所述顶升移栽机构上表面。
6.根据权利要求1所述的袋装物料智能拆垛装置,其特征在于,所述第一传送机和第二传送机侧部分别设有第一支架和第二支架,所述第一支架和第二支架上端分别通过l形折弯伸向所述第一传送机和第二传送机正上方,以分别连接所述第一传感器和第二传感器。
7.根据权利要求1所述的袋装物料智能拆垛装置,其特征在于,第一传感器和第二传感器均为3d相机。
技术总结
本技术涉及智能拆垛的技术领域,具体涉及一种袋装物料智能拆垛装置,包括呈线性分布的第一传送机和第二传送机,第一传送机和第二传送机之间设有顶升移栽机构,第一传送机和第二传送机的拆垛工位分别设有第一传感器和第二传感器;第一传送机和第二传送机之间还设有拆垛机构,拆垛机构靠近物料接收机构的起点,顶升移栽机构的一侧通过第三传送机连接托盘存放工位。设置两个传送机对拆垛机构进行供给,从而在一个传送机上的托盘拆垛完成后,可以无缝衔接至另一传送机进行拆垛,从而极大的提高了物料的输送效率,拆垛机构与3D相机相结合,实现袋装物料的精准抓取。
技术研发人员:岳海姣,步向辉,李玉坤,衡天龙,郭海钦
受保护的技术使用者:清研自动化技术(洛阳)有限公司
技术研发日:20240903
技术公布日:2024/10/10
- 还没有人留言评论。精彩留言会获得点赞!