钩臂车钩臂的控制方法、装置、电子设备及存储介质与流程
本发明涉及车辆工程,尤其是涉及一种钩臂车钩臂的控制方法、装置、电子设备及存储介质。
背景技术:
1、在车辆工程领域,特别是在钩臂车的设计和使用中,钩臂的定位是一个重要的环节。钩臂车是一种常见的装卸设备,其主要功能是通过钩臂的伸缩和旋转,将货物装载或卸载到指定的位置。
2、但是,在实际操作中,钩臂的定位通常需要通过人工操作来完成,这不仅效率低下,而且定位精度难以保证。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种提高定位精度的钩臂车钩臂的控制方法及装置。
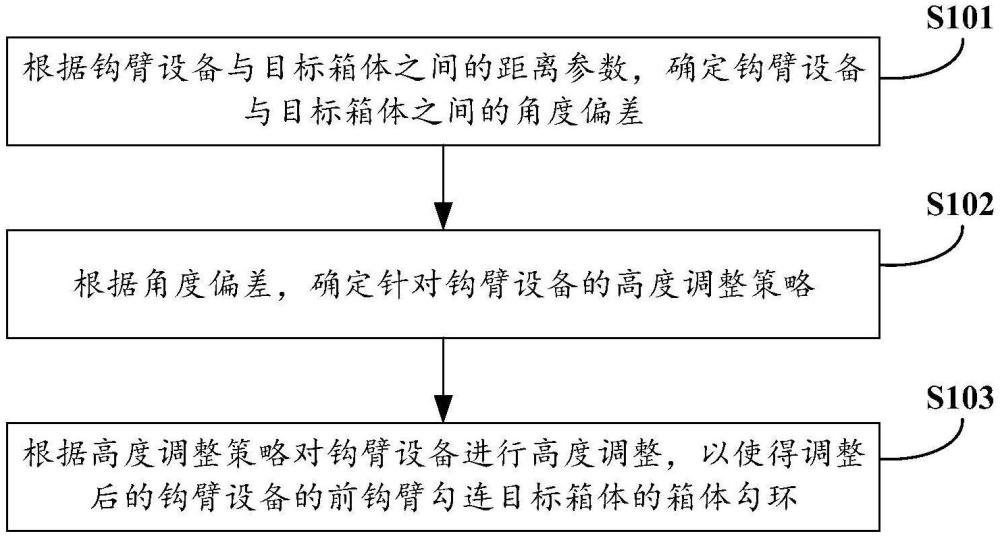
2、第一方面,本发明实施例提供了一种钩臂车钩臂的控制方法,方法包括:根据钩臂设备与目标箱体之间的距离参数,确定钩臂设备与目标箱体之间的角度偏差;根据角度偏差,确定针对钩臂设备的高度调整策略;根据高度调整策略对钩臂设备进行高度调整,以使得调整后的钩臂设备的前钩臂勾连目标箱体的箱体勾环。
3、在本发明较佳的实施例中,根据钩臂设备与目标箱体之间的距离参数,确定钩臂设备与目标箱体之间的角度偏差,包括:根据钩臂设备与目标箱体之间的距离参数,确定钩臂设备的前钩臂勾连目标箱体的箱体勾环时所需的需求角度;获取钩臂设备的前钩臂对应的当前角度;根据需求角度和当前角度,确定钩臂设备与目标箱体之间的角度偏差。
4、在本发明较佳的实施例中,根据钩臂设备与目标箱体之间的距离参数,确定钩臂设备的前钩臂勾连目标箱体的箱体勾环时所需的需求角度,包括:根据钩臂设备与目标箱体之间的距离参数,确定钩臂设备的前钩臂勾连目标箱体的箱体勾环时所需的需求高度;根据钩臂设备的前钩臂勾连目标箱体的箱体勾环时所需的需求高度,确定需求角度。
5、在本发明较佳的实施例中,获取钩臂设备的前钩臂对应的当前角度,包括:触发钩臂设备对应的坡道传感器;将坡道传感器检测到的当前坡度,作为钩臂设备的前钩臂对应的当前角度。
6、在本发明较佳的实施例中,根据角度偏差,确定针对钩臂设备的高度调整策略,包括:在需求角度小于当前角度的情况下,则确定高度调整策略为根据高度调整量,下降钩臂设备的钩臂主臂;在需求角度大于当前角度的情况下,则确定高度调整策略为根据高度调整量,升高钩臂设备的钩臂主臂;其中,高度调整量根据角度偏差确定。
7、在本发明较佳的实施例中,高度调整量的确定过程包括:根据预设的候选调整量与候选偏差之间的映射关系和角度偏差,确定高度调整量。
8、在本发明较佳的实施例中,根据高度调整策略对钩臂设备进行高度调整,包括:在钩臂设备根据高度调整策略调整至预设位置后,则向钩臂设备发送禁止指令,以使钩臂设备在预设位置禁止进行高度调整。
9、第二方面,本发明实施例还提供一种钩臂车钩臂的控制装置,包括:第一确定模块,用于根据钩臂设备与目标箱体之间的距离参数,确定钩臂设备与目标箱体之间的角度偏差;第二确定模块,用于根据角度偏差,确定针对钩臂设备的高度调整策略;调整模块,用于根据高度调整策略对钩臂设备进行高度调整,以使得调整后的钩臂设备的前钩臂勾连目标箱体的箱体勾环。
10、第三方面,本发明实施例还提供一种电子设备,包括处理器和存储器,存储器存储有能够被处理器执行的计算机可执行指令,处理器执行计算机可执行指令以实现上述第一方面的钩臂车钩臂的控制方法。
11、第四方面,本发明实施例还提供一种计算机可读存储介质,计算机可读存储介质存储有计算机可执行指令,计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现上述第一方面的钩臂车钩臂的控制方法。
12、本发明实施例带来了以下有益效果:
13、本发明实施例提供了一种钩臂车钩臂的控制方法、装置、电子设备及存储介质,根据钩臂设备与目标箱体之间的距离参数,确定钩臂设备与目标箱体之间的角度偏差,并根据角度偏差,确定针对钩臂设备的高度调整策略;进而,根据高度调整策略对钩臂设备进行高度调整,以使得调整后的钩臂设备的前钩臂勾连目标箱体的箱体勾环。根据上述内容可知,本申请本申请通过获取角度偏差,以实现根据角度偏差体现钩臂设备与目标箱体之间的位置关系,进而,保证了在根据角度偏差确定针对钩臂设备的高度调整策略的过程中,能够保证高度调整策略符合钩臂设备的情急情况,并且,在根据高度调整策略对钩臂设备进行高度调整后,能够有效实现钩臂设备的前钩臂勾连目标箱体的箱体勾环,降低了钩臂设备的操作难度,提升了钩臂设备的工作效率,降低量控制钩臂设备时的操作繁琐程度,防止钩臂设备与目标箱体之间发生不合理的接触碰撞,保证了钩臂设备与目标箱体的使用寿命不会再勾连的过程中受到影响。
14、本公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本公开的上述技术即可得知。
15、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种钩臂车钩臂的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据钩臂设备与目标箱体之间的距离参数,确定所述钩臂设备与所述目标箱体之间的角度偏差,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据钩臂设备与目标箱体之间的距离参数,确定所述钩臂设备的前钩臂勾连所述目标箱体的箱体勾环时所需的需求角度,包括:
4.根据权利要求2所述的方法,其特征在于,所述获取所述钩臂设备的前钩臂对应的当前角度,包括:
5.根据权利要求2所述的方法,其特征在于,所述根据所述角度偏差,确定针对所述钩臂设备的高度调整策略,包括:
6.根据权利要求5所述的方法,其特征在于,所述高度调整量的确定过程包括:
7.根据权利要求1所述的方法,其特征在于,所述根据所述高度调整策略对所述钩臂设备进行高度调整,包括:
8.一种钩臂车钩臂的控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现权利要求1至7任一项所述的钩臂车钩臂的控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,所述计算机可执行指令促使处理器实现权利要求1至7任一项所述的钩臂车钩臂的控制方法。
技术总结
本发明提供了一种钩臂车钩臂的控制方法、装置、电子设备及存储介质,涉及车辆工程技术技术领域,包括:根据钩臂设备与目标箱体之间的距离参数,确定钩臂设备与目标箱体之间的角度偏差;根据角度偏差,确定针对钩臂设备的高度调整策略;根据高度调整策略对钩臂设备进行高度调整,以使得调整后的钩臂设备的前钩臂勾连目标箱体的箱体勾环。该方式中,根据高度调整策略对钩臂设备进行高度调整,以使得调整后的钩臂设备的前钩臂勾连目标箱体的箱体勾环。降低了钩臂设备的操作难度,提升了钩臂设备的工作效率。
技术研发人员:金子茗,张跃革
受保护的技术使用者:南京金龙客车制造有限公司
技术研发日:
技术公布日:2025/4/10
- 还没有人留言评论。精彩留言会获得点赞!