一种铝材加工用转运机械手的制作方法
本发明涉及铝材加工,具体涉及一种铝材加工用转运机械手。
背景技术:
1、铝板转运时通常使用机械手辅助完成,通过机械手的参与能够提高对铝板转运的效率,同时能够减少工人劳动力,从而降低对工件加工的成本,大多数的机械手采用吸盘对工件进行夹持,这样能够减少机械手对铝板的损伤。
2、在公开号为cn116079771a的专利中公开了一种工件转运用机械手,包括支撑架、多个吸盘和封堵组件,根据第一支撑平台上设置的多个导管,任意两个导管之间均处于连通状态,供气单元能够向导管内吹气或者吸气,每个导管上设置有多个排气口,每个排气口上设置有一个吸盘,多个吸盘共同对工件进行吸附,根据封堵组件的设置,在吸盘的导气管内形成自下而上流动的气体时,封堵组件对导气管进行封堵;
3、上述相关技术存在以下缺陷:其各吸盘的位置是固定设置的,无法进行调节,从而难以对一些异型铝板进行稳定吸附,导致其适用范围较小;其次其在对异型铝板进行吸附时,容易出现各吸盘受力不均的情况,个别吸盘受力过大超出承载范围容易出现与铝板脱离的情况,进而难以保证对铝板转运的稳定性。
技术实现思路
1、本发明的目的是提供一种铝材加工用转运机械手,以解决现有技术中各吸盘的位置是固定设置的,无法进行调节,从而难以对一些异型铝板进行稳定吸附,导致其适用范围较小;其次其在对异形铝板进行吸附时,容易出现各吸盘受力不均的情况,个别吸盘受力过大超出承载范围容易出现与铝板脱离的情况,进而难以保证对铝板转运稳定性的问题。
2、为了实现上述目的,本发明提供如下技术方案:一种铝材加工用转运机械手,包括机械臂、支撑架和多个吸盘,还包括:
3、适应性调节机构,其包括滑接在支撑架内部的多个滑架和用于驱动滑架移动的伸缩组件,所述吸盘设置在滑架的下方;
4、监测机构,其设置在滑架与吸盘之间,用于监测吸盘底部的重力;
5、重心调节机构,其设置在机械臂和支撑架之间,用于在吸盘吸住铝板时,根据监测机构监测到的重力,调节支撑架的重心;
6、辅助清理机构,其安装在滑架上,用于在吸盘与铝板接触前,自动对铝板顶部进行清理。
7、进一步地,所述支撑架的内部安装有真空泵,所述真空泵的输出端连接有多个气管,所述气管与吸盘连接。
8、进一步地,所述伸缩组件包括转动连接在支撑架内部的第一丝杆和安装在支撑架内部的第一电机;
9、所述第一电机的输出端与第一丝杆的一端固接;
10、所述第一丝杆的外部螺接有联动块,所述联动块固接在滑架的内部。
11、进一步地,所述监测机构包括固接在滑架底部的连接架和安装在连接架底部的拉力传感器;
12、所述拉力传感器的底部与吸盘的顶部连接。
13、进一步地,所述重心调节机构包括安装在机械臂底部的固定架和转动连接在固定架顶部的转台;
14、所述转台的内部开设有第一滑槽,所述第一滑槽的内部滑接有调节块;
15、所述固定架的内部转动连接有转盘,所述转盘的底部开设有第二滑槽,所述调节块的顶部滑接在第二滑槽的内部;
16、所述固定架顶部的内壁上安装有第二电机,所述第二电机的输出端与转盘顶部的中心固接;
17、所述转盘的底部转动连接有第二丝杆,所述转盘的底部还安装有第三电机,所述第三电机的输出端与第二丝杆的一端固接,所述调节块还螺接在第二丝杆的外部。
18、进一步地,所述固定架四侧的外壁上均固接有限位条,所述支撑架的顶部开设有四个限位槽,所述限位条插接在限位槽的内部。
19、进一步地,所述辅助清理机构包括转动连接在滑架内部的伸缩杆、设置在伸缩杆下方的刮条和滑接在滑架顶部的齿条;
20、所述伸缩杆的外部固定套接有齿轮,所述齿轮与齿条啮合;
21、所述齿条的内部开设有斜向槽和穿槽,所述斜向槽和穿槽相连通;
22、所述刮条的一端固接有连接盘,连接盘的顶部与伸缩杆的底端固接,所述连接盘的外壁上开设有环形槽,所述环形槽的内部滑接有滑块,所述滑块的顶部固接有驱动条,所述驱动条的顶端与斜向槽的内壁抵接。
23、进一步地,所述齿条的一端固接有从动块,所述滑架的外壁上固接有固定块,所述从动块与固定块之间固接有弹簧。
24、与现有技术相比,本发明提供的一种铝材加工用转运机械手,具备以下有益效果:
25、1、通过根据铝板的尺寸形状,调节各吸盘的位置,使得机械手可以对不同面积和不同形状的铝板进行抓取,进而可以对异型铝板进行抓取,提高了机械手的适用范围;
26、2、通过监测各吸盘的受力数据,配合重心调节机构,实现了对铝板受力重心调节的效果,使各个吸盘受力更加平均,避免了某个吸盘受力过重超出承载范围而导致与铝板脱离的问题,提高了铝板转运的安全性;
27、3、吸盘下降靠近铝板时,刮条先与铝板顶部接触,并在吸盘与铝板接触前,对吸盘下方的区域进行清理,实现了在吸盘与铝板接触前自动对接触位置进行定点清理的效果,防止因灰尘等颗粒杂质的存在而影响吸盘对铝板吸附稳定性的问题。
技术特征:
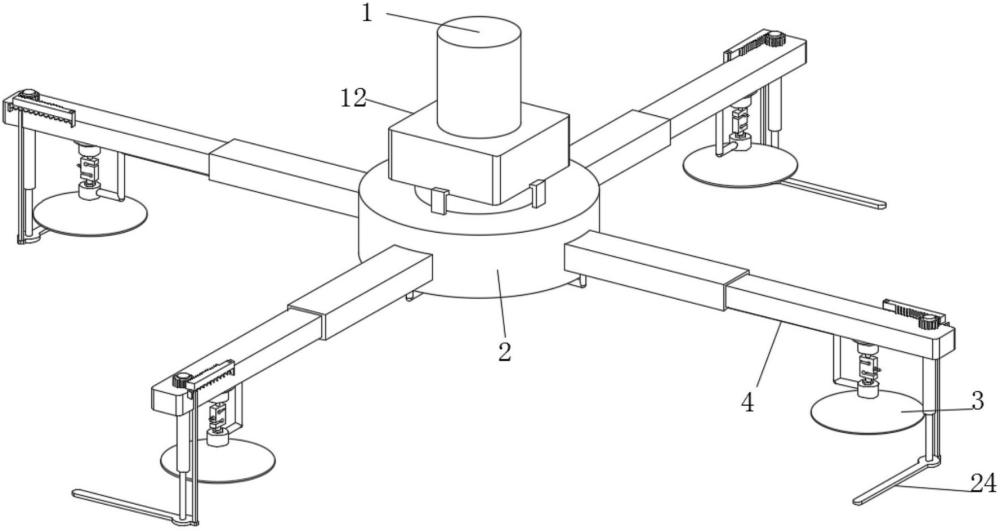
1.一种铝材加工用转运机械手,包括机械臂(1)、支撑架(2)和多个吸盘(3),其特征在于,还包括:
2.根据权利要求1所述的一种铝材加工用转运机械手,其特征在于,所述支撑架(2)的内部安装有真空泵(5),所述真空泵(5)的输出端连接有多个气管(6),所述气管(6)与吸盘(3)连接。
3.根据权利要求2所述的一种铝材加工用转运机械手,其特征在于,所述伸缩组件包括转动连接在支撑架(2)内部的第一丝杆(7)和安装在支撑架(2)内部的第一电机(8);
4.根据权利要求3所述的一种铝材加工用转运机械手,其特征在于,所述监测机构包括固接在滑架(4)底部的连接架(10)和安装在连接架(10)底部的拉力传感器(11);
5.根据权利要求4所述的一种铝材加工用转运机械手,其特征在于,所述重心调节机构包括安装在机械臂(1)底部的固定架(12)和转动连接在固定架(12)顶部的转台(13);
6.根据权利要求5所述的一种铝材加工用转运机械手,其特征在于,所述固定架(12)四侧的外壁上均固接有限位条(21),所述支撑架(2)的顶部开设有四个限位槽(22),所述限位条(21)插接在限位槽(22)的内部。
7.根据权利要求6所述的一种铝材加工用转运机械手,其特征在于,所述辅助清理机构包括转动连接在滑架(4)内部的伸缩杆(23)、设置在伸缩杆(23)下方的刮条(24)和滑接在滑架(4)顶部的齿条(25);
8.根据权利要求7所述的一种铝材加工用转运机械手,其特征在于,所述齿条(25)的一端固接有从动块(30),所述滑架(4)的外壁上固接有固定块(31),所述从动块(30)与固定块(31)之间固接有弹簧(32)。
技术总结
本发明公开了一种铝材加工用转运机械手,涉及铝材加工技术领域,包括机械臂、支撑架和多个吸盘,还包括:适应性调节机构,其包括滑接在支撑架内部的多个滑架和用于驱动滑架移动的伸缩组件;监测机构,用于监测吸盘底部的重力;重心调节机构,用于在吸盘吸住铝板时,根据监测机构监测到的重力,调节支撑架的重心;该铝材加工用转运机械手,通过监测各吸盘的受力数据,配合重心调节机构,实现了对铝板受力重心调节的效果,使各个吸盘受力更加平均,避免了某个吸盘受力过重超出承载范围而导致与铝板脱离的问题,提高了铝板转运的安全性,通过对吸盘下方的区域进行清理,实现了在吸盘与铝板接触前自动对接触位置进行定点清理的效果。
技术研发人员:吕艳玲,吕俊,董满意,黄冬梨,植云芳,林美玲
受保护的技术使用者:佛山市宏略铝业有限公司
技术研发日:
技术公布日:2025/3/16
- 还没有人留言评论。精彩留言会获得点赞!