一种超声波塑料钉子焊压机的制作方法
1.本实用新型涉及焊压机领域,具体为一种超声波塑料钉子焊压机。
背景技术:
2.目前,市场上现有的压钉机主要包括气枪,铆钉压装机,普通压钉机等,这些设备大都采用强力压入模式,无法靠设备自身解决压装过程中的倒钉,过盈压装过程的挤料,溢料等问题。
技术实现要素:
3.针对现有技术的不足,本实用新型提供了一种超声波塑料钉子焊压机,解决了目前的压钉机无法靠设备自身解决压装过程中的倒钉,过盈压装过程的挤料,溢料的问题。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:一种超声波塑料钉子焊压机,包括支座,所述支座上安装有驱动机构,驱动机构底部的输出端连接有导向机构,导向机构的一侧通过夹持机构安装有焊头和超声波发生装置。
5.进一步限定,所述驱动机构采用气缸,气缸的顶端设有限位机构。
6.进一步限定,所述限位机构包括气缸活塞杆顶端螺纹连接的限位螺母。
7.进一步限定,所述夹持机构包括上夹具和下夹具,上夹具和下夹具均采用通过螺栓紧固的两个内侧为半圆形的夹持片,所述焊头的顶端与上夹具的内侧夹持固定。
8.进一步限定,所述导向机构采用与支撑机构滑动配合的直线导轨。
9.进一步限定,所述支撑机构采用螺栓与工作台的上表面垂直固定。
10.本实用新型具备以下有益效果:该超声波塑料钉子焊压机,相比传统压机集成了超声波发生装置,使塑料钉子在被压入的过程中处于高频振动的状态,解决了传统压装过程中钉子易偏或易倒的问题,同时也解决了钉子和工件孔在较大过盈配合时挤料和孔边缘翻料溢料问题;将限位机构和驱动机构集成在一起节省了空间,减轻了重量,适用于空间有限的场合;限位机构的设置使得驱动机构的输出力可调从而适用用不同压紧力要求的工件,增加了产品的兼容性。
附图说明
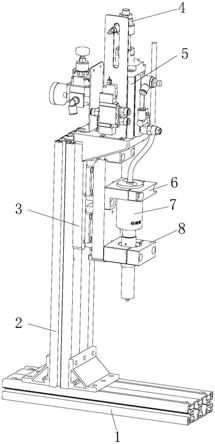
11.图1为本实用新型结构示意图;
12.图2为本实用新型正视图。
13.图中:1、工作台;2、支撑机构;3、导向机构;4、限位螺母;5、驱动机构;6、上夹具;7、焊头;8、下夹具;9、支座。
具体实施方式
14.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
15.请参阅图1-2,本实用新型提供一种技术方案:一种超声波塑料钉子焊压机,包括支座9,所述支座9上安装有驱动机构5,驱动机构5底部的输出端连接有导向机构3,导向机构3的一侧通过夹持机构安装有焊头7和超声波发生装置。
16.所述驱动机构5采用气缸,气缸的顶端设有限位机构,所述限位机构包括气缸活塞杆顶端螺纹连接的限位螺母4,限位螺母4的数量为两个,且位于下方的限位螺母4底部固定有一垫环,通过旋转底部的限位螺母4可实现对气缸行程的限位,以达到对气缸输出力调节的目的,上方限位螺母4用于对下方限位螺母4进行紧固,防止滑脱。
17.所述夹持机构包括上夹具6和下夹具8,上夹具6和下夹具8均采用通过螺栓紧固的两个内侧为半圆形的夹持片,所述焊头7的顶端与上夹具6的内侧夹持固定,下夹具8则用来对焊头7限位以及对超声波发生装置夹持安装。
18.所述导向机构3采用与支撑机构2滑动配合的直线导轨,通过直线导轨与支撑机构2的配合,使得焊头7的下压稳定,支撑机构2采用螺栓与工作台1的上表面垂直固定。
19.在进行操作时,将塑料钉和工工件置于焊头7底部的工作台1上,启动设备,气缸带动焊头7下压同时超声波发生装置发超声,焊头7将塑料钉子压入工件孔中,气缸复位,超声波发生装置停止。
20.该超声波塑料钉子焊压机,相比传统压机集成了超声波发生装置,使塑料钉子在被压入的过程中处于高频振动的状态,解决了传统压装过程中钉子易偏或易倒的问题,同时也解决了钉子和工件孔在较大过盈配合时挤料和孔边缘翻料溢料问题;将限位机构和驱动机构5集成在一起节省了空间,减轻了重量,适用于空间有限的场合;限位机构的设置使得驱动机构5的输出力可调从而适用用不同压紧力要求的工件,增加了产品的兼容性。
21.在其他实施例中,驱动机构5亦可为电机或液压机等其它驱动元件,本实施例仅以油缸来进行举例说明。
22.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
23.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种超声波塑料钉子焊压机,包括支座,其特征在于:所述支座上安装有驱动机构,驱动机构底部的输出端连接有导向机构,导向机构的一侧通过夹持机构安装有焊头和超声波发生装置。2.根据权利要求1所述的一种超声波塑料钉子焊压机,其特征在于:所述驱动机构采用气缸,气缸的顶端设有限位机构。3.根据权利要求2所述的一种超声波塑料钉子焊压机,其特征在于:所述限位机构包括气缸活塞杆顶端螺纹连接的限位螺母。4.根据权利要求3所述的一种超声波塑料钉子焊压机,其特征在于:所述夹持机构包括上夹具和下夹具,上夹具和下夹具均采用通过螺栓紧固的两个内侧为半圆形的夹持片,所述焊头的顶端与上夹具的内侧夹持固定。5.根据权利要求4所述的一种超声波塑料钉子焊压机,其特征在于:所述导向机构采用与支撑机构滑动配合的直线导轨。6.根据权利要求5所述的一种超声波塑料钉子焊压机,其特征在于:所述支撑机构采用螺栓与工作台的上表面垂直固定。
技术总结
本实用新型公开了一种超声波塑料钉子焊压机,包括支座,所述支座上安装有驱动机构,驱动机构底部的输出端连接有导向机构,导向机构的一侧通过夹持机构安装有焊头和超声波发生装置。该超声波塑料钉子焊压机,相比传统压机集成了超声波发生装置,使塑料钉子在被压入的过程中处于高频振动的状态,解决了传统压装过程中钉子易偏或易倒的问题,同时也解决了钉子和工件孔在较大过盈配合时挤料和孔边缘翻料溢料问题;将限位机构和驱动机构集成在一起节省了空间,减轻了重量,适用于空间有限的场合;限位机构的设置使得驱动机构的输出力可调从而适用用不同压紧力要求的工件,增加了产品的兼容性。兼容性。兼容性。
技术研发人员:石新华 孙松 石建华
受保护的技术使用者:无锡骄成智能科技有限公司
技术研发日:2021.08.25
技术公布日:2022/1/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1