高效的组合式注塑机械手装置的制作方法
本技术属于机械手,具体涉及高效的组合式注塑机械手装置。
背景技术:
1、注塑机械手是为注塑生产自动化专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件和安全生产;能够模仿人体上肢的部分功能,可以对其进行自动控制使其按照预定要求输送制品或操持工具进行生产操作的自动化生产设备。
2、在实现本申请过程中,发明人发现该技术中至少存在如下问题:现有的机械手单次只能拿取一样物品,当注塑成品较多且大小不一时单一性能的机械手已经不能满足所需的拿取功能;因此,可作进一步改善。
技术实现思路
1、针对背景技术中现有的机械手单次只能拿取一样物品,当注塑成品较多且大小不一时单一性能的机械手已经不能满足所需的拿取功能的问题,本申请提供一种高效的组合式注塑机械手装置,本实用新型通过可转动机械手本体,充分利用机械手本体前后侧壁上的多个上爪块和下爪块,通过推动装置和转轴控制多个上爪块和下爪块的方位,满足一次对多个不同形状的物体进行拿取,功能性和效率更高。
2、本实用新型解决其技术问题采用的技术方案如下:
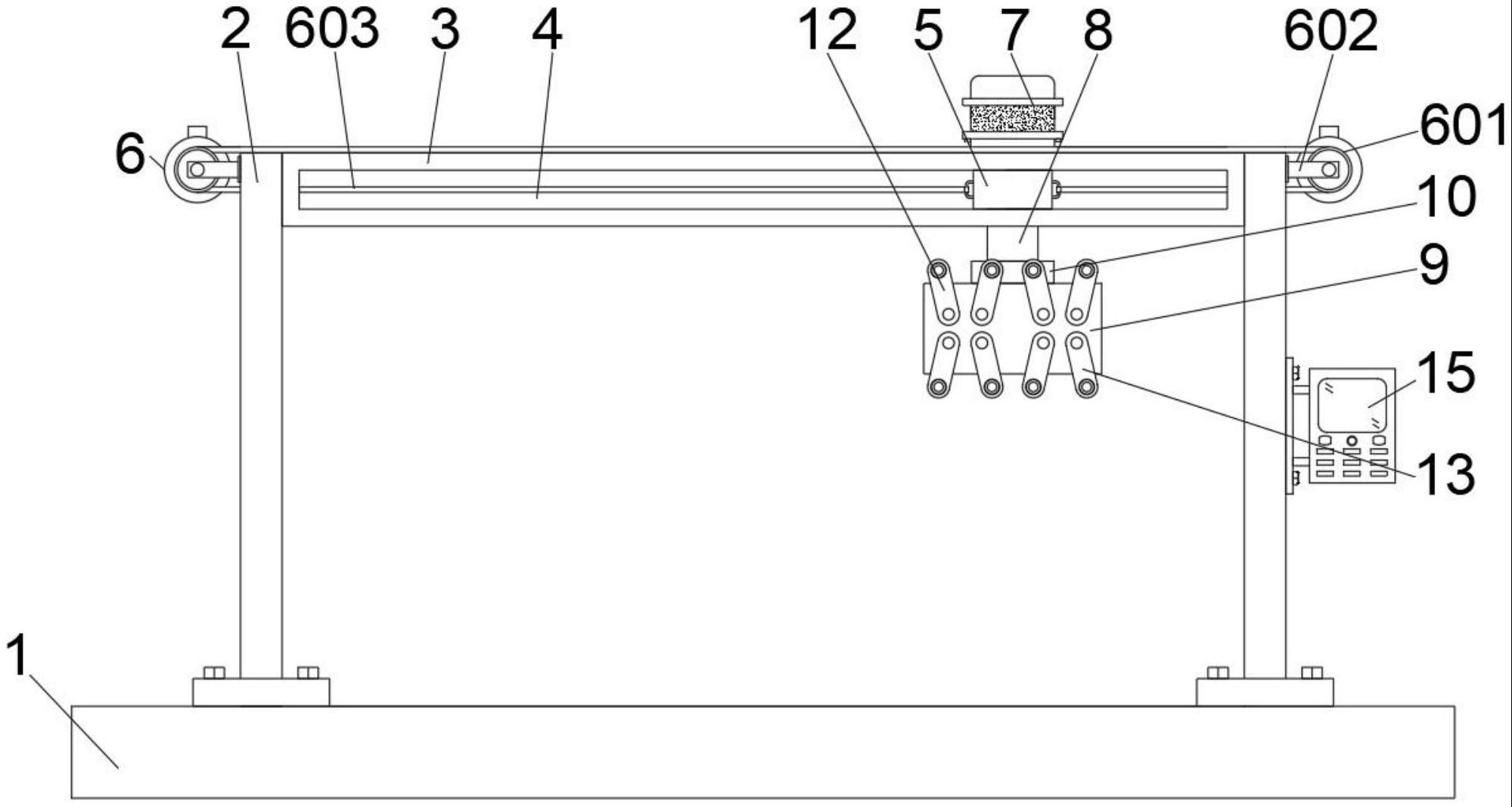
3、高效的组合式注塑机械手装置,包括工作台和竖直设置在工作台上方两侧的立柱,所述立柱顶端设有有连接立柱水平放置的横板,所述横板内设有空腔,所述横板内装有可在空腔内部左右移动的活动件,所述立柱和横板内设有带动活动件左右移动的水平移动装置,所述活动件上设有气缸,所述活动件下方设有由气缸带动上下移动的移动杆,所述移动杆下方设有机械手本体,所述机械手本体上方设有连接件,所述连接件和移动杆连接处通过驱动件转动连接,所述机械手本体前后侧壁上分布有多个上爪块和下爪块,所述上爪块和下爪块相对于机械手本体侧壁上下分布,所述上爪块和下爪块通过独立的推动装置向机械手本体前后移动,所述上爪块和下爪块同结构,所述上爪块和下爪块的推动装置同结构,所述立柱上设有控制机械手装置运行的控制器,所述上爪块和下爪块正面设有对物体进行吸取的吸取装置。
4、进一步的,所述水平移动装置包括设置在两个立柱与横板相对的另一侧的滚轮,所述滚轮与立柱通过连接块连接,左右两个滚轮之间设有由滚轮带动移动的传送带,上侧传送带位于横板上方,下侧传送带穿过横板在空腔内部水平设置,位于空腔内部的传送带与活动件连接带动活动件在空腔内左右移动,所述滚轮上设有带动滚轮转动的驱动装置。
5、进一步的,所述上爪块至少设置一个,所述下爪块至少设置一个。
6、进一步的,所述推动装置包括镶嵌在机械手本体侧壁上的电动伸缩杆,所述电动伸缩杆的移动端远离固定端的一侧与上爪块通过转轴转动连接,所述电动伸缩杆的移动端伸出机械手本体设置在外侧。
7、进一步的,所述吸取装置包括设置在上爪块正面向内凹陷的凹槽,所述凹槽内部设有伸缩柱,所述伸缩柱外套接有弹簧,所述上爪块正面设有连通外界和凹槽、且宽度小于凹槽宽度的开口,所述伸缩柱接近开口的一侧设有可在开口内部移动的压缩块,所述压缩块远离凹槽的一侧设有对物体进行吸取的吸盘。
8、本实用新型的有益效果是:
9、1.每个上爪块和下爪块后侧的推动装置通过对相对应的上爪块和下爪块进行推动,将上爪块和下爪块调整到不同的水平面后,利用前后的位置差,可以同时对多个物体进行吸取,且上爪块和下爪块通过转轴可以将上爪块和下爪块上的吸取装置调整到更广的一侧,增加上爪块和下爪块拿取的角度,针对位置比较偏的所需拿取的物体,且通过上爪块和下爪块的吸取装置调整,面对一些重量较重的物体,可以方便寻找定位到更好拿取的角度,增加物体拿取后的平衡性,防止“头重脚轻”造成掉落损坏。
10、2.气缸带动机械手本体上下移动,更便于对物体进行拿取,机械手本体通过驱动件与移动杆转动连接,便于机械手本体前后侧壁上的上爪块和下爪块通过对机械手本体的转动调整到更贴近需要拿取的物体的一端。
11、3.设置伸缩柱和弹簧,当上爪块和下爪块接触到物体时有一定的缓冲作用,防止上爪块和下爪块对物体的抓力过大造成物体损坏。
技术特征:
1.高效的组合式注塑机械手装置,其特征在于:包括工作台和竖直设置在工作台上方两侧的立柱,所述立柱顶端设有连接立柱水平放置的横板,所述横板内设有空腔,所述横板内装有可在空腔内部左右移动的活动件,所述立柱和横板内设有带动活动件左右移动的水平移动装置,所述活动件上设有气缸,所述活动件下方设有由气缸带动上下移动的移动杆,所述移动杆下方设有机械手本体,所述机械手本体上方设有连接件,所述连接件和移动杆连接处通过驱动件转动连接,所述机械手本体前后侧壁上分布有多个上爪块和下爪块,所述上爪块和下爪块相对于机械手本体侧壁上下分布,所述上爪块和下爪块通过独立的推动装置向机械手本体前后移动,所述上爪块和下爪块同结构,所述上爪块和下爪块的推动装置同结构,所述立柱上设有控制机械手装置运行的控制器,所述上爪块和下爪块正面设有对物体进行吸取的吸取装置。
2.根据权利要求1所述的高效的组合式注塑机械手装置,其特征在于:所述水平移动装置包括设置在两个立柱与横板相对的另一侧的滚轮,所述滚轮与立柱通过连接块连接,左右两个滚轮之间设有由滚轮带动移动的传送带,上侧传送带位于横板上方,下侧传送带穿过横板在空腔内部水平设置,位于空腔内部的传送带与活动件连接带动活动件在空腔内左右移动,所述滚轮上设有带动滚轮转动的驱动装置。
3.根据权利要求1所述的高效的组合式注塑机械手装置,其特征在于:所述上爪块至少设置一个,所述下爪块至少设置一个。
4.根据权利要求1所述的高效的组合式注塑机械手装置,其特征在于:所述推动装置包括镶嵌在机械手本体侧壁上的电动伸缩杆,所述电动伸缩杆的移动端远离固定端的一侧与上爪块通过转轴转动连接,所述电动伸缩杆的移动端伸出机械手本体设置在外侧。
5.根据权利要求1所述的高效的组合式注塑机械手装置,其特征在于:所述吸取装置包括设置在上爪块正面向内凹陷的凹槽,所述凹槽内部设有伸缩柱,所述伸缩柱外套接有弹簧,所述上爪块正面设有连通外界和凹槽、且宽度小于凹槽宽度的开口,所述伸缩柱接近开口的一侧设有可在开口内部移动的压缩块,所述压缩块远离凹槽的一侧设有对物体进行吸取的吸盘。
技术总结
本技术涉及高效的组合式注塑机械手装置,包括工作台和立柱,立柱顶端设有横板,横板内设有空腔,横板内装有活动件,立柱和横板内设有水平移动装置,活动件上设有气缸,活动件下方设有移动杆,移动杆下方设有机械手本体,机械手本体上方设有连接件,连接件和移动杆连接处通过驱动件转动连接,机械手本体前后侧壁上分布有多个上爪块和下爪块,上爪块和下爪块通过独立的推动装置向机械手本体前后移动,上爪块和下爪块正面设有吸取装置,本技术通过可转动机械手本体,充分利用机械手本体前后侧壁上的多个上爪块和下爪块,通过推动装置和转轴控制多个上爪块和下爪块的方位,满足一次对多个不同形状的物体进行拿取,功能性和效率更高。
技术研发人员:马斌,於红飞,马振叶,高明国
受保护的技术使用者:常州江鼎精密机械有限公司
技术研发日:20230316
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!