重载机器人自动铺丝系统的制作方法
本申请涉及铺丝机,尤其是涉及一种重载机器人自动铺丝系统。
背景技术:
1、目前,随着飞机及航天器应用的材料主要向轻量化转移,因此,复合材料开始得到应用,铺丝机是将材料以丝带形式进行铺设,根据复合材料的形态需求,通过多条丝带多层的铺设,实现对复合材料的成型,但现有的铺丝机一般包括机械臂和安装在机械臂上的铺丝头,但现有的铺丝机的机械臂无法实现多自由度运动,无法实现精确的铺丝操作,严重影响铺丝效果,最终影响复合材料的性能。
技术实现思路
1、本申请的目的在于提供一种重载机器人自动铺丝系统,在一定程度上解决了现有技术中存在的铺丝机的机械臂无法实现多自由度运动,无法实现精确的铺丝操作,严重影响铺丝效果,最终影响复合材料构件的性能的技术问题。
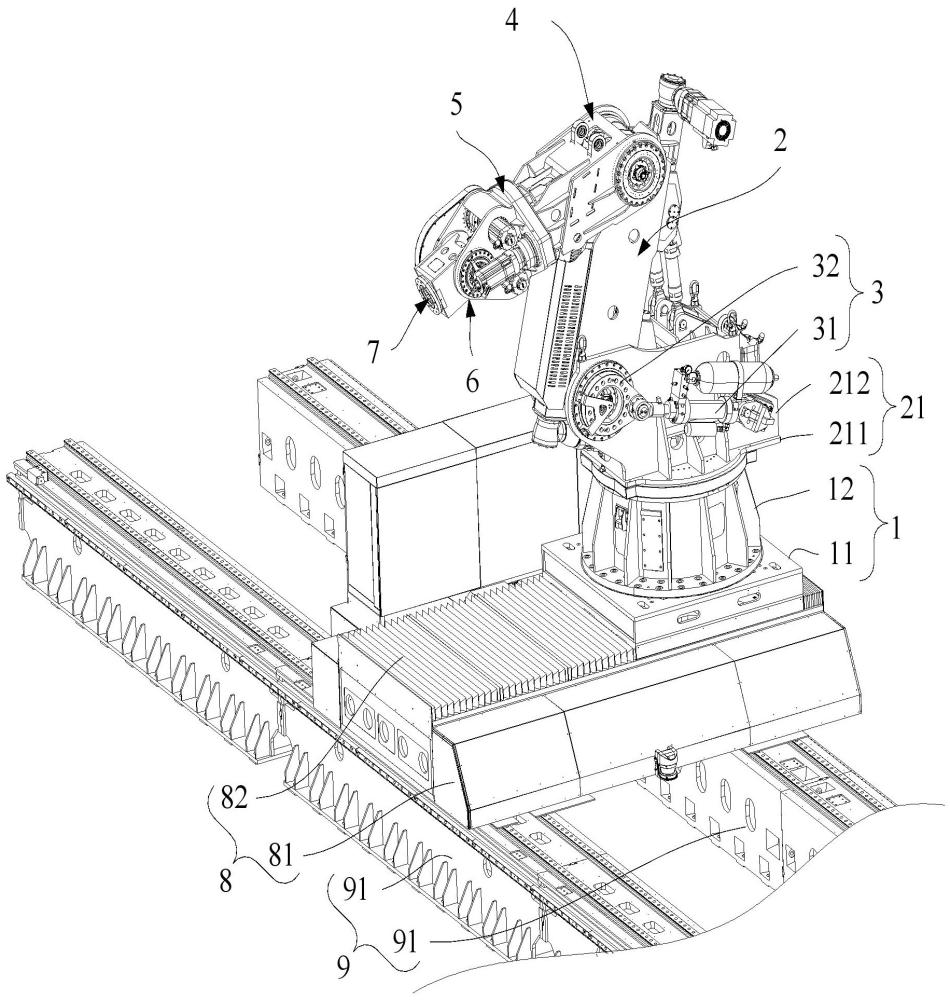
2、本申请提供了一种重载机器人自动铺丝系统,包括:第一旋转机构、第一摆臂机构、第二摆臂机构、第二旋转机构、第三旋转机构以及第四旋转机构;其中,所述第一摆臂机构设置于所述第一旋转机构,且所述第一旋转机构用于驱动所述第一摆臂机构围绕第一轴旋转;
3、所述第二摆臂机构设置于所述第一摆臂机构,且所述第一摆臂机构用于驱动所述第二摆臂机构围绕第二轴旋转;
4、所述第二旋转机构设置于所述第二摆臂机构,所述第二摆臂机构用于驱动所述第二旋转机构围绕第三轴旋转;
5、所述第三旋转机构设置于所述第二旋转机构,且所述第二旋转机构用于驱动所述第三旋转机构围绕第四轴旋转;
6、所述第四旋转机构设置于所述第三旋转机构,且所述第三旋转机构用于驱动所述第四旋转机构围绕第五轴旋转;所述第四旋转机构用于驱动安装于其上的设备围绕第六轴旋转。
7、在上述技术方案中,进一步地,所述第一旋转机构包括转盘以及第一支撑构件;其中,所述第一支撑构件设置于所述转盘,所述转盘用于驱动所述第一支撑构件旋转;所述第一摆臂机构设置于所述第一支撑构件。
8、在上述任一技术方案中,进一步地,所述第一摆臂机构包括安装构件、第一驱动装置、第一摆动臂、第一丝杠传动组件以及第一连杆;
9、其中,所述安装构件设置于所述第一旋转机构;所述第一摆动臂的相对的两端分别与所述安装构件以及所述第二摆臂机构转动连接;
10、所述第一摆动臂形成有安装腔,所述第一驱动装置以及所述第一丝杠传动组件均设置于所述安装腔;所述第一驱动装置通过所述第一丝杠传动组件与所述第一连杆的一端转动连接,所述第一连杆的相对的另一端与所述安装构件转动连接。
11、在上述任一技术方案中,进一步地,所述重载机器人自动铺丝系统还包括平衡机构,所述平衡机构设置在所述第一摆臂机构和所述第一旋转机构之间,且用于辅助所述第一摆臂机构稳定旋转。
12、在上述任一技术方案中,进一步地,所述平衡机构包括驱动缸、传动轮以及传动轴;
13、其中,所述第一摆动臂与所述安装构件通过所述传动轴转动连接;所述传动轮套设于所述传动轴的一端部,且所述传动轮能够与所述传动轴同步转动;
14、所述驱动缸设置于所述安装构件,且所述驱动缸的伸缩端与所述传动轮相连接。
15、在上述任一技术方案中,进一步地,所述第二摆臂机构包括第二驱动装置、第二摆动臂、第二丝杠传动组件以及第二连杆;其中,所述第二摆动臂的相对两端分别与所述第一摆臂机构以及所述第二旋转机构转动连接;
16、所述第二驱动装置以及所述第二丝杠传动组件均设置于所述安装腔;所述第二驱动装置通过所述第二丝杠传动组件与所述第二连杆的一端转动连接,所述第二连杆的相对的另一端与所述第二摆动臂转动连接。
17、在上述任一技术方案中,进一步地,所述第二旋转机构包括第三驱动装置、第一传动轮组件以及第一安装座;其中,所述第一安装座与所述第二摆臂机构转动连接;
18、所述第三驱动装置通过所述第一传动轮组件与所述第一安装座相连接,用于驱动所述第一安装座相对所述第二摆臂机构旋转;所述第三旋转机构设置于所述第一安装座。
19、在上述任一技术方案中,进一步地,所述第三旋转机构包括第四驱动装置、第二传动轮组件以及第二安装座;其中,所述第二安装座与所述第二旋转机构转动连接;
20、所述第二安装座形成有空腔,所述第四驱动装置设置于所述空腔,所述第二传动轮组件设置于所述第二安装座的外侧,且所述第四驱动装置通过所述第二传动轮组件与所述第二安装座相连接,用于驱动所述第二安装座相对所述第二旋转机构旋转;
21、所述第四旋转机构设置于所述第二安装座。
22、在上述任一技术方案中,进一步地,所述第四旋转机构包括第五驱动装置以及第三安装座;其中,所述第五驱动装置与所述第三旋转机构相连接;
23、所述第五驱动装置与所述第三安装座相连接,用于驱动所述第三安装座相对所述第三旋转机构旋转。
24、在上述任一技术方案中,进一步地,所述重载机器人自动铺丝系统还包括第一移动机构,所述第一旋转机构设置于所述第一移动机构,且所述第一移动机构用于驱动所述第一旋转机构沿着第一方向移动;
25、所述第一移动机构包括支撑座、第六驱动装置、丝杠机构;其中,所述第一旋转机构与所述支撑座滑动连接;
26、所述支撑座形成有内部中空的安装空间,所述第六驱动装置以及所述丝杠机构均设置于所述安装空间,且所述第六驱动装置通过所述丝杠机构与所述第一旋转机构相连接,用于驱动所述第一旋转机构相对所述支撑座移动。
27、在上述任一技术方案中,进一步地,所述重载机器人自动铺丝系统还包括第二移动机构,所述第一移动机构设置于所述第二移动机构,且所述第二移动机构用于驱动所述第一移动机构沿着与第一方向相垂直的第二方向移动;
28、所述第二移动机构第七驱动装置、齿轮、齿条以及轨道基座;其中,所述齿条设置于所述轨道基座内;所述第七驱动装置以及所述齿轮设置于所述支撑座内,且所述第七驱动装置与所述齿轮相连接,所述齿轮与所述齿条相啮合。
29、与现有技术相比,本申请的有益效果为:
30、本申请提供的重载机器人自动铺丝系统能够实现六自由度转动,进而配合本重载机器人自动铺丝系统的头部安装的设备例如铺丝头能够实现超高精度的铺丝操作,以满足现有的复合材料的形态需求,通过多条丝带多层的铺设,实现对复合材料的成型。
技术特征:
1.一种重载机器人自动铺丝系统,其特征在于,包括:第一旋转机构、第一摆臂机构、第二摆臂机构、第二旋转机构、第三旋转机构以及第四旋转机构;其中,所述第一摆臂机构设置于所述第一旋转机构,且所述第一旋转机构用于驱动所述第一摆臂机构围绕第一轴旋转;
2.根据权利要求1所述的重载机器人自动铺丝系统,其特征在于,所述第一旋转机构包括转盘以及第一支撑构件;其中,所述第一支撑构件设置于所述转盘,所述转盘用于驱动所述第一支撑构件旋转;所述第一摆臂机构设置于所述第一支撑构件。
3.根据权利要求1所述的重载机器人自动铺丝系统,其特征在于,所述第一摆臂机构包括安装构件、第一驱动装置、第一摆动臂、第一丝杠传动组件以及第一连杆;
4.根据权利要求3所述的重载机器人自动铺丝系统,其特征在于,所述重载机器人自动铺丝系统还包括平衡机构,所述平衡机构设置在所述第一摆臂机构和所述第一旋转机构之间,且用于辅助所述第一摆臂机构稳定旋转。
5.根据权利要求4所述的重载机器人自动铺丝系统,其特征在于,所述平衡机构包括驱动缸、传动轮以及传动轴;
6.根据权利要求3所述的重载机器人自动铺丝系统,其特征在于,所述第二摆臂机构包括第二驱动装置、第二摆动臂、第二丝杠传动组件以及第二连杆;其中,所述第二摆动臂的相对两端分别与所述第一摆臂机构以及所述第二旋转机构转动连接;
7.根据权利要求1所述的重载机器人自动铺丝系统,其特征在于,所述第二旋转机构包括第三驱动装置、第一传动轮组件以及第一安装座;其中,所述第一安装座与所述第二摆臂机构转动连接;
8.根据权利要求1所述的重载机器人自动铺丝系统,其特征在于,所述第三旋转机构包括第四驱动装置、第二传动轮组件以及第二安装座;其中,所述第二安装座与所述第二旋转机构转动连接;
9.根据权利要求1所述的重载机器人自动铺丝系统,其特征在于,所述第四旋转机构包括第五驱动装置以及第三安装座;其中,所述第五驱动装置与所述第三旋转机构相连接;
10.根据权利要求1所述的重载机器人自动铺丝系统,其特征在于,所述重载机器人自动铺丝系统还包括第一移动机构,所述第一旋转机构设置于所述第一移动机构,且所述第一移动机构用于驱动所述第一旋转机构沿着第一方向移动;
11.根据权利要求10所述的重载机器人自动铺丝系统,其特征在于,所述重载机器人自动铺丝系统还包括第二移动机构,所述第一移动机构设置于所述第二移动机构,且所述第二移动机构用于驱动所述第一移动机构沿着与第一方向相垂直的第二方向移动;
技术总结
本申请涉及铺丝机技术领域,尤其是涉及一种重载机器人自动铺丝系统,包括第一旋转机构、第一摆臂机构、第二摆臂机构、第二旋转机构、第三旋转机构及第四旋转机构,第一摆臂机构设置于第一旋转机构,能驱动第一摆臂机构围绕第一轴旋转;第二摆臂机构设置于第一摆臂机构,能驱动第二摆臂机构围绕第二轴旋转;第二旋转机构设置于第二摆臂机构,能驱动第二旋转机构绕第三轴旋转;第三旋转机构设置于第二旋转机构,能驱动第三旋转机构绕第四轴旋转;第四旋转机构设置于第三旋转机构,能驱动第四旋转机构绕第五轴旋转;第四旋转机构能驱动安装于其上的设备绕第六轴旋转。本结构能实现六自由度转动,进而配合铺丝头能实现超高精度的铺丝操作。
技术研发人员:祝建彬,李文波,蔡志嘉,周雄伟
受保护的技术使用者:杭州艾美依航空制造装备有限公司
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!