一种工业炉自动清洗机器人用炉灰转运装置
本发明涉及工业炉灰处理,尤其涉及一种工业炉自动清洗机器人用炉灰转运装置。
背景技术:
1、目前随着科技的发展,虽然新能源在不断的进行开发利用,但是通过煤炭的燃烧发电依然是一些工厂的电力来源,工业上通过使用工业炉进行煤炭的充分燃烧,从而将热能转化为电能,煤炭燃烧后会留下炉灰在工业炉中,因此需要对定时对工业炉的内部炉灰进行处理。
2、而目前在进行处理工业炉中的炉灰时,工业炉底部沉降的炉灰直接取出处理即可,而炉壁上的炉灰需要使用机器人进行处理,并通过负压将炉灰吸出,但是目前的设备在将炉灰吸出后,需要人工定时对收集袋进行更换,在更换收集袋时需要将机器人停止,极大的影响了炉灰的处理效率,同时人工更换时会导致炉灰飞散到空气中,影响工作环境。
3、基于此,本发明设计了一种工业炉自动清洗机器人用炉灰转运装置,以解决上述问题。
技术实现思路
1、本发明实施例的目的在于提供一种工业炉自动清洗机器人用炉灰转运装置,旨在解决背景技术中提及的现有技术所存在的技术问题。
2、本发明实施例是这样实现的,一种工业炉自动清洗机器人用炉灰转运装置,所述装置包括收集工位、沉降工位、下料工位和上料工位四个工位,还包括:
3、主体架:包括设于主体架上的安装台,安装台的表面安装有燃烧炉,安装台的表面固定安装有固定台;
4、收集机构:包括放置于固定台上的四个收集布袋,每个收集布袋的表面均固定安装有布袋接头,布袋接头的表面与重力圆筒块的内壁相接触,重力圆筒块的表面与连接筒的内壁滑动连接,连接筒固定安装于转动板的表面,转动板的内壁与固定台转动连接,转动板的表面与切换筒转动连接,转动板上开设有四个透气孔;切换筒的内部开设有弧形槽孔,切换筒的表面固定安装有收集管道,收集管道的表面安装有负压泵,收集布袋、布袋接头、重力圆筒块、连接筒、转动板、切换筒和收集管道的内部相通,收集管道的另一端与安装台上开设的圆孔相连;
5、移动机构:通过与蓄力机构相配合对转动板蓄力;
6、限位机构:通过与移动机构配合对转动板解除限位;
7、刮除机构:通过和收集管道配合对燃烧炉内的炉灰进行吸收。
8、进一步的,所述移动机构包括固定安装于重力圆筒块上的移动圆杆,移动圆杆的表面与受压块相接触,受压块的表面通过压缩弹簧与固定台相连,且受压块的表面通过安装柱与固定台滑动连接,受压块的表面转动安装有摆动杆,摆动杆远离受压块的一端与推力块转动连接,推力块与固定台的表面滑动连接,推力块的表面固定安装有l形棘齿条,l形棘齿条与固定台的表面滑动连接,l形棘齿条与转动齿轮相啮合,转动齿轮与固定台同轴转动连接,重力圆筒块的表面通过复位弹簧与连接筒相连。
9、更进一步的,所述蓄力机构包括与转动齿轮内壁同轴固定连接的随动齿轮,固定台贯穿于随动齿轮且与随动齿轮转动连接,随动齿轮与限位棘齿轮相啮合,限位棘齿轮固定安装在固定台上,转动齿轮的表面通过蓄力弹簧与转动板相连。
10、更进一步的,所述限位机构包括固定安装于受压块上的限位柱,且转动板的表面开设有与限位柱相配合的四个限位槽,限位柱的一端设有圆球。
11、更进一步的,所述装置还包括卡合机构,卡合机构包括与重力圆筒块的内壁滑动连接的两个卡合头,每个卡合头的表面均固定安装有卡合滑块,且每个卡合头的表面均与布袋接头相接触,卡合滑块与重力圆筒块滑动连接,卡合滑块的表面转动安装有卡合滑杆,卡合滑杆远离卡合滑块的一端与移动滑块转动连接,移动滑块与重力圆筒块的表面滑动连接,且移动滑块通过挤压弹簧与重力圆筒块相连,移动滑块的表面固定安装有反压杆,固定台的表面固定安装有凸轮块,凸轮块上设有与反压杆相配合且顺序首尾连接的同心弧面、近心弧面和远心弧面,近心弧面的轨迹半径逐渐增大,远心弧面的轨迹半径逐渐减小,卡合头上设置有半球台阶。
12、更进一步的,所述装置还包括开口机构,开口机构包括固定安装在重力圆筒块上的两个固定齿条,每个固定齿条均与开口齿轮相啮合,开口齿轮的表面固定安装有转动圆块,转动圆块的两端贯穿于布袋接头且与布袋接头转动连接,转动圆块的直径与布袋接头的内径相同。
13、更进一步的,所述刮除机构包括固定安装于安装台上的驱动电机,驱动电机的输出端贯穿于安装台且与安装台转动连接,驱动电机的输出端固定安装有转动丝杆,转动丝杆与丝杆滑筒形成螺旋副传动,丝杆滑筒的表面与固定导向筒滑动连接,固定导向筒与安装台上开设的圆孔相连通,丝杆滑筒的表面固定安装有旋转机器人,旋转机器人的表面固定安装有伸缩壁,伸缩壁的另一端与刮除块相连,刮除块上开设有负压孔,且负压孔与伸缩壁、旋转机器人、丝杆滑筒和固定导向筒顺序相通。
14、与现有技术相比,本发明的有益效果是:
15、1、本发明通过蓄力机构内部的蓄力作用带动转动板进行公转,转动板的公转带动收集布袋从收集工位a运动至沉降工位b处,此时新的收集布袋运动至收集管道的下方,从而达到自动切换收集布袋的目的;
16、2、本发明通过切换筒上设置的弧形槽孔,使得在切换筒与收集工位a处转动板上的圆孔还未脱离配合时,此时切换筒与上料工位d处转动板的圆孔进行配合,从而避免出现负压泵一端被堵住的情况出现,实现负压泵的不停机循环对炉灰转运的功能。
技术特征:
1.一种工业炉自动清洗机器人用炉灰转运装置,其特征在于,所述装置包括收集工位a、沉降工位b、下料工位c和上料工位d四个工位,还包括:
2.根据权利要求1所述的一种工业炉自动清洗机器人用炉灰转运装置,其特征在于,所述移动机构(3)包括固定安装于重力圆筒块(203)上的移动圆杆(301),移动圆杆(301)的表面与受压块(302)相接触,受压块(302)的表面通过压缩弹簧(303)与固定台(103)相连,且受压块(302)的表面通过安装柱与固定台(103)滑动连接,受压块(302)的表面转动安装有摆动杆(308),摆动杆(308)远离受压块(302)的一端与推力块(304)转动连接,推力块(304)与固定台(103)的表面滑动连接,推力块(304)的表面固定安装有l形棘齿条(305),l形棘齿条(305)与固定台(103)的表面滑动连接,l形棘齿条(305)与转动齿轮(306)相啮合,转动齿轮(306)与固定台(103)同轴转动连接,重力圆筒块(203)的表面通过复位弹簧(307)与连接筒(208)相连。
3.根据权利要求2所述的一种工业炉自动清洗机器人用炉灰转运装置,其特征在于,所述蓄力机构(4)包括与转动齿轮(306)内壁同轴固定连接的随动齿轮(401),固定台(103)贯穿于随动齿轮(401)且与随动齿轮(401)转动连接,随动齿轮(401)与限位棘齿轮(402)相啮合,限位棘齿轮(402)固定安装在固定台(103)上,转动齿轮(306)的表面通过蓄力弹簧(403)与转动板(204)相连。
4.根据权利要求2所述的一种工业炉自动清洗机器人用炉灰转运装置,其特征在于,所述限位机构(5)包括固定安装于受压块(302)上的限位柱(502),且转动板(204)的表面开设有与限位柱(502)相配合的四个限位槽(501),限位柱(502)的一端设有圆球。
5.根据权利要求1所述的一种工业炉自动清洗机器人用炉灰转运装置,其特征在于,所述装置还包括卡合机构(6),卡合机构(6)包括与重力圆筒块(203)的内壁滑动连接的两个卡合头(601),每个卡合头(601)的表面均固定安装有卡合滑块(602),且每个卡合头(601)的表面均与布袋接头(202)相接触,卡合滑块(602)与重力圆筒块(203)滑动连接,卡合滑块(602)的表面转动安装有卡合滑杆(603),卡合滑杆(603)远离卡合滑块(602)的一端与移动滑块(604)转动连接,移动滑块(604)与重力圆筒块(203)的表面滑动连接,且移动滑块(604)通过挤压弹簧与重力圆筒块(203)相连,移动滑块(604)的表面固定安装有反压杆(605),固定台(103)的表面固定安装有凸轮块(606),凸轮块(606)上设有与反压杆(605)相配合且顺序首尾连接的同心弧面(607)、近心弧面(608)和远心弧面(609),近心弧面(608)的轨迹半径逐渐增大,远心弧面(609)的轨迹半径逐渐减小,卡合头(601)上设置有半球台阶。
6.根据权利要求1所述的一种工业炉自动清洗机器人用炉灰转运装置,其特征在于,所述装置还包括开口机构(7),开口机构(7)包括固定安装在重力圆筒块(203)上的两个固定齿条(701),每个固定齿条(701)均与开口齿轮(702)相啮合,开口齿轮(702)的表面固定安装有转动圆块(703),转动圆块(703)的两端贯穿于布袋接头(202)且与布袋接头(202)转动连接,转动圆块(703)的直径与布袋接头(202)的内径相同。
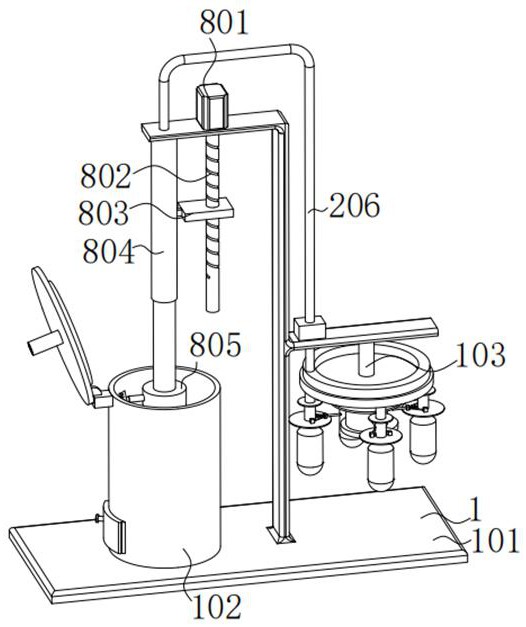
7.根据权利要求1所述的一种工业炉自动清洗机器人用炉灰转运装置,其特征在于,所述刮除机构(8)包括固定安装于安装台(101)上的驱动电机(801),驱动电机(801)的输出端贯穿于安装台(101)且与安装台(101)转动连接,驱动电机(801)的输出端固定安装有转动丝杆(802),转动丝杆(802)与丝杆滑筒(803)形成螺旋副传动,丝杆滑筒(803)的表面与固定导向筒(804)滑动连接,固定导向筒(804)与安装台(101)上开设的圆孔相连通,丝杆滑筒(803)的表面固定安装有旋转机器人(805),旋转机器人(805)的表面固定安装有伸缩壁(806),伸缩壁(806)的另一端与刮除块(807)相连,刮除块(807)上开设有负压孔,且负压孔与伸缩壁(806)、旋转机器人(805)、丝杆滑筒(803)和固定导向筒(804)顺序相通。
技术总结
本发明公开了涉及工业炉灰处理技术领域的一种工业炉自动清洗机器人用炉灰转运装置,所述装置包括收集工位、沉降工位、下料工位和上料工位四个工位,还包括主体架:包括设于主体架上的安装台,安装台的表面安装有燃烧炉,安装台的表面固定安装有固定台;收集机构包括放置于固定台上的四个收集布袋,每个收集布袋的表面均固定安装有布袋接头,布袋接头的表面与重力圆筒块的内壁相接触,重力圆筒块的表面与连接筒的内壁滑动连接,连接筒固定安装于转动板的表面;通过蓄力机构内部的蓄力作用带动转动板进行公转,转动板的公转带动收集布袋从收集工位a运动至沉降工位b处,此时新的收集布袋运动至收集管道的下方,从而达到自动切换收集布袋的目的。
技术研发人员:王义洋,肖冬,刘东,王巍,马红军,张海军,郭海丰,孟昭军,史纯阳,王魏
受保护的技术使用者:辽宁科技学院
技术研发日:
技术公布日:2025/3/27
- 还没有人留言评论。精彩留言会获得点赞!