一种气态二氧化氯空气消毒机器人工作方法与流程
本发明涉及消毒机器人,尤其涉及一种气态二氧化氯空气消毒机器人工作方法。
背景技术:
1、近年来,我国空气污染越来越严重,随着人们生活水平的提高,室内空气质量也受到重视。室内空气质量是指建筑物及建筑物内的空气质量,这会影响在建筑物内生活人们的健康及舒适。室内空气质量会受气体(特别是二氧化碳、甲醛、挥发性有机物)、pm2.5、微生物或是其他会影响健康情形的物质所影响。
2、而传统消毒方式,一般采用:1、被动式消毒,例如光触媒、等离子、高压静电、紫外循环风等,被动式消毒只能对被吸入的空气进行消毒,一般都需要前置过滤,容易二次污染,循环风不能有效吸入室内较远距离空气,实际效率低,不能在病毒出现时迅速处理,循环风可能还会加大气溶胶传播距离;2、主动式消毒,例如臭氧,世界“五大”有害气体之一,不能大面积推广,消毒剂,使用方式微雾、喷洒、熏蒸,操作难,对气溶胶效果差,紫外灯,对气溶胶效果差,穿透性差,强度衰减。
技术实现思路
1、本发明的目的是为了解决现有技术中空气消毒设备使用效果不佳的缺点,而提出的一种气态二氧化氯空气消毒机器人工作方法。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种气态二氧化氯空气消毒机器人工作方法,包括以下步骤:
4、s1,机器人通电处于待机状态;
5、s2,机器人接收控制指令进入工作模式;
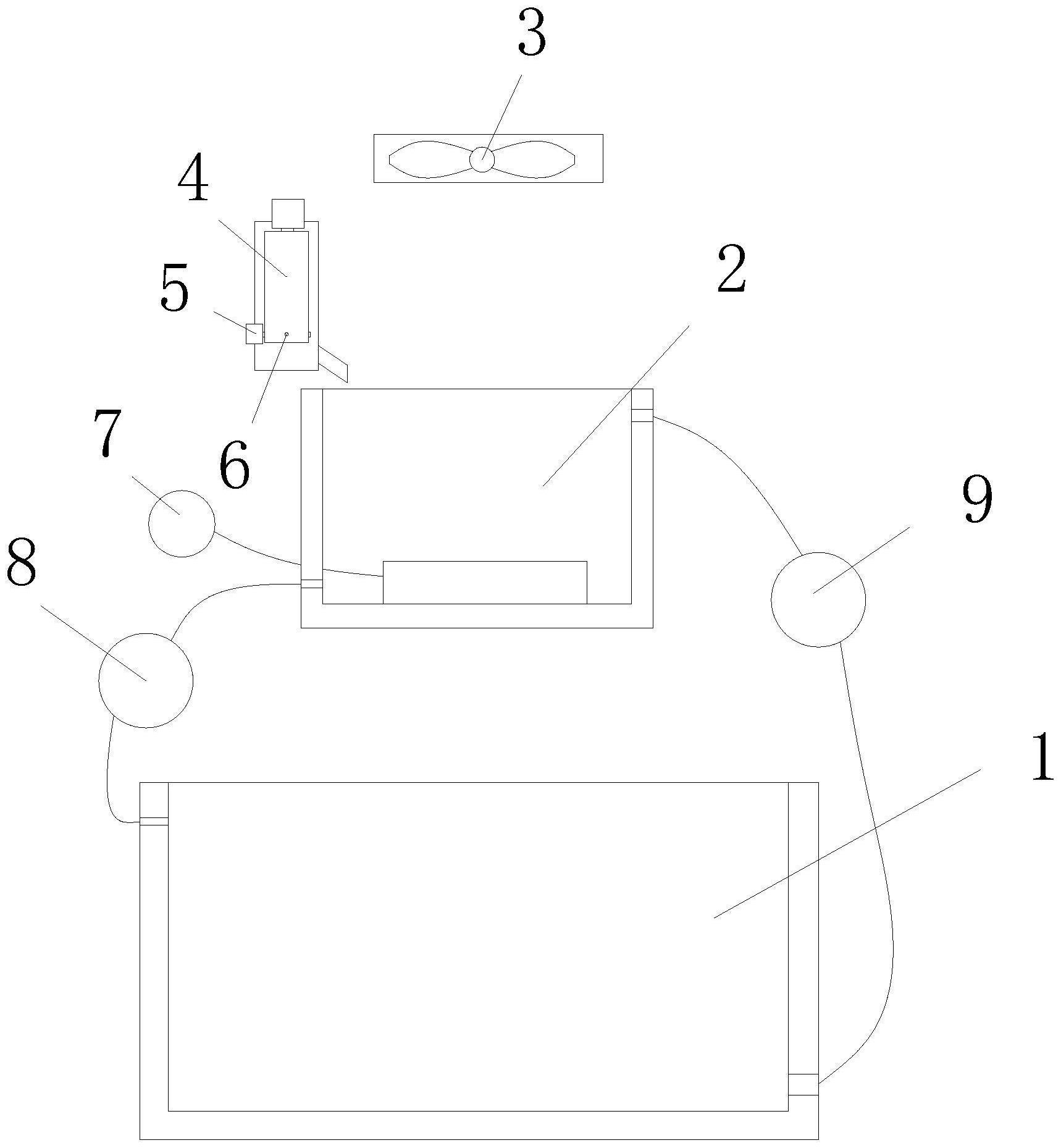
6、s3,控制器控制风扇进入设定功率工作,通过第二水泵抽取主水箱1内设定体积的液体进入反应池,通过药剂投放机构向反应池投放设定剂量的二氧化氯固体药剂,通过气泵向反应池内的液体中释放气体,风扇及气泵工作至设定时间;
7、s4,机器人工作至设定时间后,控制器控制风扇低速运转或关闭,关闭气泵,通过第一水泵抽取反应池中全部的液体进入主水箱,机器人进入所述待机状态。
8、所述工作模式包括人机共存模式,机器人接收控制指令进入人机共存模式:
9、s3中设定时间为30-120分钟;
10、s3中投放的二氧化氯固体药剂为1g-3g;
11、s3中气泵工作时,气泵工作的功率与设定时间呈反比;和/或气泵采用间断式启停工作。
12、定义:气泵最大功率为p1;风扇最大功率为p2;s3中风扇工作的功率为:80%*p2或90%*p2;
13、s3中设定时间为30分钟时,气泵工作功率为:80%*p1;
14、s3中设定时间为60分钟时,气泵工作功率为:70%*p1;
15、s3中设定时间为90分钟时,气泵工作功率为:65%*p1;
16、s3中设定时间为120分钟时,气泵工作功率为:60%*p1。
17、s3中设定时间为30-60分钟时,风扇工作的功率为:80%*p2,s3中设定时间为90-120分钟时,气泵每运行8分钟就会暂停运行2分钟,且气泵暂停工作的时间段中风扇工作的功率为:90%*p2。
18、所述工作模式包括强力模式,机器人接收控制指令进入强力模式:
19、s3中设定时间为10-30分钟;
20、s3中投放的二氧化氯固体药剂为2g-4g;
21、s3中气泵工作时,气泵工作的功率与设定时间呈反比。
22、定义:气泵最大功率为p1;风扇最大功率为p2;s3中风扇工作的功率为:90%*p2;
23、s3中设定时间为10分钟时,气泵工作功率为:p1;
24、s3中设定时间为15分钟时,气泵工作功率为:95%*p1;
25、s3中设定时间为20分钟时,气泵工作功率为:90%*p1;
26、s3中设定时间为25分钟时,气泵工作功率为:85%*p1;
27、s3中设定时间为30分钟时,气泵工作功率为:80%*p1。
28、所述二氧化氯固体药剂为片状,每片药剂重量为1g。
29、所述药剂投放机构包括存储二氧化氯固体片剂的圆柱壳体投放机构、用于带动圆柱壳体投放机构定角度旋转的电机,所述圆柱壳体投放机构每旋转九十度能够投放一片药剂,所述圆柱壳体投放机构外圆周设有四个凸起,位于圆柱壳体投放机构外侧安装有微动开关,所述凸起每经过一次微动开关,所述微动开关向控制器发送一次计数信息。
30、所述控制器连接有控制显示屏、和/或语音控制播报模块、和/或app控制模块、和/或定时启动模块。
31、本发明提出的一种气态二氧化氯空气消毒机器人工作方法,有益效果在于:二氧化氯固体药剂投入水中形成二氧化氯水溶液,二氧化氯游离在液体中,通过气泵、风扇将二氧化氯因子释放到空气中,二氧化氯因子在空气中主动捕杀病菌,并且空气中的二氧化氯因子做布朗运动,实现对空间内全方位主动消毒,对环境彻底消毒处理,提高消毒效率。
技术特征:
1.一种气态二氧化氯空气消毒机器人工作方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种气态二氧化氯空气消毒机器人工作方法,其特征在于,所述工作模式包括人机共存模式,机器人接收控制指令进入人机共存模式:
3.根据权利要求2所述的一种气态二氧化氯空气消毒机器人工作方法,其特征在于,定义:气泵最大功率为p1;风扇最大功率为p2;s3中风扇工作的功率为:80%*p2或90%*p2;
4.根据权利要求3所述的一种气态二氧化氯空气消毒机器人工作方法,其特征在于,s3中设定时间为30-60分钟时,风扇工作的功率为:80%*p2,s3中设定时间为90-120分钟时,气泵每运行8分钟就会暂停运行2分钟,且气泵暂停工作的时间段中风扇工作的功率为:90%*p2。
5.根据权利要求1-4任一项所述的一种气态二氧化氯空气消毒机器人工作方法,其特征在于,所述工作模式包括强力模式,机器人接收控制指令进入强力模式:
6.根据权利要求5所述的一种气态二氧化氯空气消毒机器人工作方法,其特征在于,定义:气泵最大功率为p1;风扇最大功率为p2;s3中风扇工作的功率为:90%*p2;
7.根据权利要求1或2或3或4或6所述的一种气态二氧化氯空气消毒机器人工作方法,其特征在于,所述二氧化氯固体药剂为片状,每片药剂重量为1g。
8.根据权利要求7所述的一种气态二氧化氯空气消毒机器人工作方法,其特征在于,所述药剂投放机构(4)包括存储二氧化氯固体片剂的圆柱壳体投放机构、用于带动圆柱壳体投放机构定角度旋转的电机,所述圆柱壳体投放机构每旋转九十度能够投放一片药剂,所述圆柱壳体投放机构外圆周设有四个凸起(6),位于圆柱壳体投放机构外侧安装有微动开关(5),所述凸起每经过一次微动开关,所述微动开关向控制器发送一次计数信息。
9.根据权利要求1或2或3或4或6或8所述的一种气态二氧化氯空气消毒机器人工作方法,其特征在于,所述控制器连接有控制显示屏、和/或语音控制播报模块、和/或app控制模块、和/或定时启动模块。
技术总结
本发明涉及消毒机器人技术领域,尤其是一种气态二氧化氯空气消毒机器人工作方法,包括S1,机器人通电处于待机状态;S2,机器人接收控制指令进入工作模式;S3,控制器控制风扇进入设定功率工作,通过第二水泵抽取主水箱1内设定体积的液体进入反应池,通过药剂投放机构向反应池投放设定剂量的二氧化氯固体药剂,通过气泵向反应池内的液体中释放气体,风扇及气泵工作至设定时间;S4,机器人工作至设定时间后,控制器控制风扇低速运转或关闭,关闭气泵,通过第一水泵抽取反应池中全部的液体进入主水箱,机器人进入所述待机状态。通过本方法实现对空间内全方位主动消毒,对环境彻底消毒处理,提高消毒效率。
技术研发人员:徐又敬,陈欣
受保护的技术使用者:安徽逸天科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!