一种吸油烟机及其工作方法与流程
本发明涉及一种吸油烟机及其工作方法。
背景技术:
1、升降吸油烟机是一种集烟腔可以升降的吸油烟机。通过改变集烟腔的位置,可以在吸油烟时,减小集烟腔与锅具之间的距离来提高抽吸效果。同时还能够在非工作时,将集烟腔缩回,减少烟机占用的空间,便于用户使用厨房空间。但是升降吸油烟机在使用中存在一个问题:集烟腔下降过程中容易出现碰撞到锅具的情况发生,影响烹饪的安全。
2、授权公告号为cn115823635b(申请号为202310105371.5)的中国发明专利《一种升降烟机及其升降控制方法》,其中公开的升降烟机包括外壳组件、集烟罩、升降机构和风机,升降烟机还包括倾斜检测器和控制器,倾斜检测器用于检测前方障碍物的距离,倾斜检测器安装在集烟罩下,倾斜检测器的检测方向与铅垂线具有夹角,升降机构及倾斜检测器均与控制器连接。通过倾斜检测器检测集烟罩与锅具最高点的距离,根据检测到的距离以及预设的安全距离,确定集烟罩最终下降的高度,能够有效避免集烟罩撞击锅具,提高升降烟机的使用安全性。该升降控制方法中仍然存在一些问题,一个问题为:计算过程中存在夹角计算,但是倾斜检测器安装后,其与铅垂线之间的夹角无法准确获取,即检测夹角存在经度问题,从而直接影响计算结果以及对碰撞判断的准确性。另一个问题为:利用倾斜检测器检测锅具的最高点位置时,基于其工作原理,检测的是锅具外侧边缘对应的最高点距离,但是如该发明专利说明书附图的图4显示,由于锅具放置在升降集烟罩的运动范围外,即使集烟罩下降至低于锅具最高点的位置,也不会发生碰撞锅具的问题,而基于该升降控制方法会出现碰撞误判的情况,进而导致了因碰撞误判的结果而限制集烟罩的活动范围,使得集烟罩无法达到最好的油烟抽吸效果。
技术实现思路
1、本发明所要解决的第一个技术问题是针对上述现有技术提供一种能够准确判断集烟罩与锅具是否接触碰撞,避免碰撞误判的吸油烟机。
2、本发明所要解决的第二个技术问题是针对上述现有技术提供一种前述吸油烟机的工作方法,简单、准确地实现集烟罩与锅具是否接触碰撞的判断。
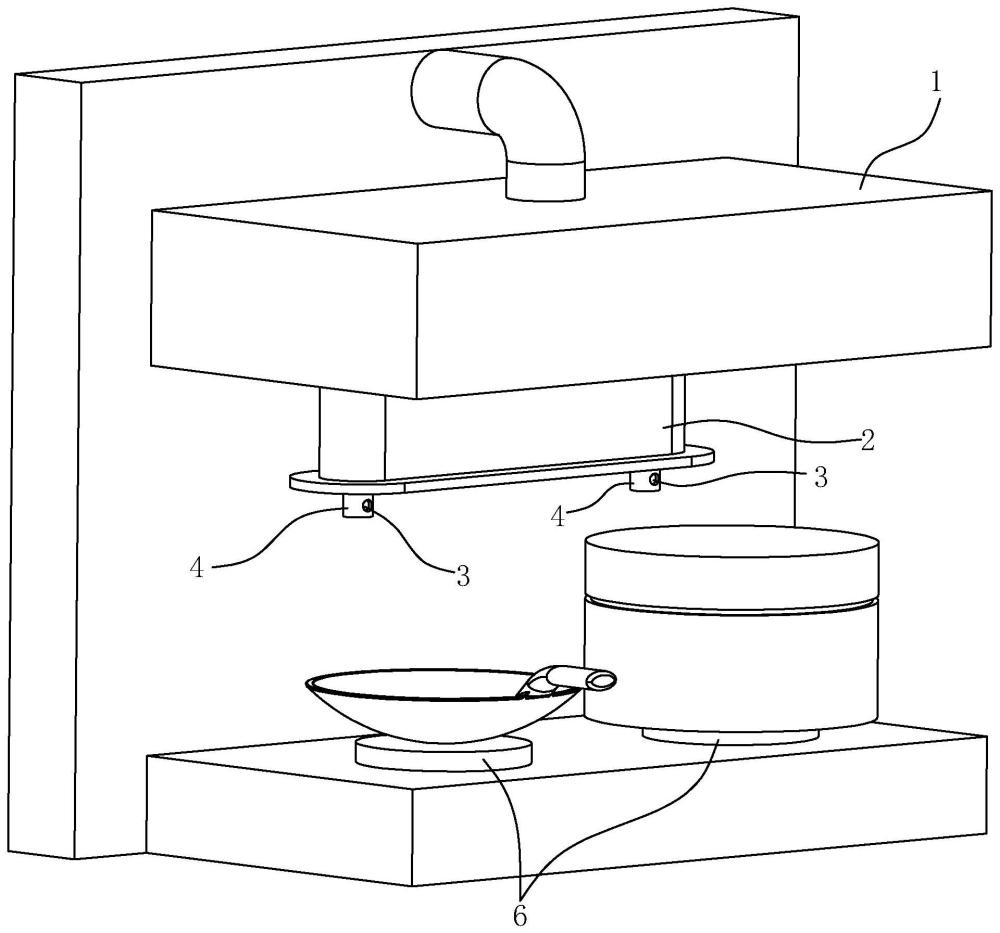
3、本发明解决上述第一个技术问题所采用的技术方案为:一种吸油烟机,包括机壳,控制器,可升降设置在机壳上的集烟罩,设置在机壳内且与集烟罩驱动连接的第一升降驱动机构,其特征在于:还包括对应于每个灶具放置位设置的距离检测器,所述距离检测器设置在集烟罩下表面的后部,所述距离检测器的检测方向水平向前且与灶具放置位的中心相对,所述控制器分别与第一升降驱动机构、距离检测器电信号连接。
4、为了吸油烟机的美观性,同时也为了提高距离检测器的使用寿命,所述距离检测器可升降地嵌设在集烟罩上。
5、方便安装地,所述集烟罩的下表面上嵌设有可升降的安装座,所述集烟罩内设有与安装座驱动连接的第二升降驱动机构,所述第二升降驱动机构与控制器电信号连接。
6、可选择地,所述距离传感器为红外距离传感器、激光距离传感器、超声波距离传感器或雷达距离传感器。
7、为了吸油烟机的美观性,同时为了提高集烟罩下降距离的范围,提高油烟抽吸效果,所述集烟罩在竖直方向上扁平地设置在机壳的后部。
8、本发明解决上述第二个技术问题所采用的技术方案为:一种吸油烟机的工作方法,其特征在于:所述吸油烟机采用如前述的吸油烟机;
9、吸油烟机的工作方法包括以下步骤:集烟罩向下运动时,控制器实时获取距离检测器的检测值,并根据检测值计算距离检测器距离前方障碍物的距离l;
10、将l与预设的距离阈值l0进行比较;
11、如果l≤l0,则判断存在碰撞锅具的风险,同时控制器控制集烟罩停止向下运动。
12、作为改进,如果l>l1,则判断用户站立在吸油烟机前方,l1为距离检测器(3)距离灶具所在台面前侧边缘的水平距离。
13、优选地,当检测到用户站立在吸油烟机前方时,控制器控制吸油烟机启动吸油烟机的人机交互功能。
14、优选地,所述距离阈值l0为距离检测器与灶具放置位中心所在的沿左右方向延伸的竖直平面之间的水平距离;或者
15、所述距离阈值l0为距离检测器与集烟罩前侧所在的沿左右方向延伸的竖直平面之间的水平距离。
16、作为改进,所述距离检测器可升降地嵌设在集烟罩上,当集烟罩向下运动时,控制距离检测器下移而露出在集烟罩下方。
17、与现有技术相比,本发明的优点在于:本发明中的吸油烟机,设置了位于集烟罩下方的距离检测器。基于其工作方法,通过距离检测器在水平方向上的距离检测,能够提前预判是否存在集烟罩碰撞锅具的风险,并且判断时,是基于障碍物后侧作为判断基准,因此避免了无碰撞风险下的碰撞误判,保证吸油烟机可靠运行。
技术特征:
1.一种吸油烟机,包括机壳(1),控制器,可升降设置在机壳(1)上的集烟罩(2),设置在机壳(1)内且与集烟罩(2)驱动连接的第一升降驱动机构,其特征在于:还包括对应于每个灶具放置位(5)设置的距离检测器(3),所述距离检测器(3)设置在集烟罩(2)下表面的后部,所述距离检测器(3)的检测方向水平向前且与灶具放置位(5)的中心相对,所述控制器分别与第一升降驱动机构、距离检测器(3)电信号连接。
2.根据权利要求1所述的吸油烟机,其特征在于:所述距离检测器(3)可升降地嵌设在集烟罩(2)上。
3.根据权利要求2所述的吸油烟机,其特征在于:所述集烟罩(2)的下表面上嵌设有可升降的安装座(4),所述集烟罩(2)内设有与安装座(4)驱动连接的第二升降驱动机构,所述第二升降驱动机构与控制器电信号连接。
4.根据权利要求1所述的吸油烟机,其特征在于:所述距离传感器为红外距离传感器、激光距离传感器、超声波距离传感器或雷达距离传感器。
5.根据权利要求1至4任一项所述的吸油烟机,其特征在于:所述集烟罩(2)在竖直方向上扁平地设置在机壳(1)的后部。
6.一种吸油烟机的工作方法,其特征在于:所述吸油烟机采用如权利要求1至5任一项所述的吸油烟机;
7.根据权利要求6所述的工作方法,其特征在于:如果l>l1,则判断用户站立在吸油烟机前方,l1为距离检测器(3)距离灶具所在台面前侧边缘的水平距离。
8.根据权利要求7所述的工作方法,其特征在于:当检测到用户站立在吸油烟机前方时,控制器控制吸油烟机启动吸油烟机的人机交互功能。
9.根据权利要求6所述的工作方法,其特征在于:所述距离阈值l0为距离检测器(3)与灶具放置位(5)中心所在的沿左右方向延伸的竖直平面之间的水平距离;或者
10.根据权利要求6所述的工作方法,其特征在于:所述距离检测器(3)可升降地嵌设在集烟罩(2)上,当集烟罩(2)向下运动时,控制距离检测器(3)下移而露出在集烟罩(2)下方。
技术总结
本发明涉及一种吸油烟机,包括机壳,控制器,集烟罩,设置在机壳内且与集烟罩驱动连接的第一升降驱动机构,对应于每个灶具放置位设置的距离检测器,距离检测器设置在集烟罩下表面的后部,距离检测器的检测方向水平向前且与灶具放置位的中心相对,控制器分别与第一升降驱动机构、距离检测器电信号连接。本发明还涉及该吸油烟机的工作方法,集烟罩向下运动时,控制器实时获取距离检测器的检测值,并根据检测值计算距离检测器距离前方障碍物的距离L;将L与预设的距离阈值L0进行比较;如果L≤L0,则判断存在碰撞锅具的风险,同时控制器控制集烟罩停止向下运动。该吸油烟机及其工作方法能够准确判断集烟罩与锅具是否接触碰撞,避免碰撞误判。
技术研发人员:姚长标,郑军妹
受保护的技术使用者:宁波方太厨具有限公司
技术研发日:
技术公布日:2025/3/3
- 还没有人留言评论。精彩留言会获得点赞!