一种用于转轮除湿系统的除湿控制方法
本发明涉及除湿,尤其涉及一种用于转轮除湿系统的除湿控制方法。
背景技术:
1、转轮除湿技术是一种可以利用太阳能、工业废热、地热以及船舶废热等进行热驱动除湿的高效环保的除湿技术,已在空调领域获得较多应用。转轮的除湿过程可以分为处理过程和再生过程,本质上是水蒸气在吸附剂中的吸附和脱附过程。在处理过程中,转轮中的吸附剂将空气中的水蒸气吸附并释放出吸附热,使得空气温度升高,吸附热的存在会阻碍吸附过程的进行。在再生过程中,转轮中的吸附剂吸收高温空气中的热量得到脱附热,并将其在处理过程中吸附的水蒸气从吸附剂中脱附,脱附热的存在会阻碍脱附过程的进行。
2、在工作过程中,转轮通过不断转动来保持处理过程和再生过程的连续进行。转轮的工作过程受到众多变量的影响,如处理空气以及再生空气的流量、温度和湿度都会影响其工作性能,且这些影响并非线性关系,甚至还存在耦合关系,如吸附和脱附过程的热质耦合。此外,转轮的除湿过程还具有时滞的特点。当工况变化时,原先处于稳定工作的除湿转轮无法快速再次获得稳定工况,有时甚至转动多圈后方能获得稳定的工况。由此,可见转轮除湿过程具有多变量、非线性、强耦合和大时滞的特点。
3、对于转轮的除湿过程,常规的控制通常采用的是简单的转速增减或者结合普通的pid控制。由于转轮的除湿过程具有多变量、非线性、强耦合和大时滞的特点,常规的控制往往需要较长的时间和较多的调节过程才能获取匹配的工况,无法在较短时间内实现对转轮的除湿控制。
技术实现思路
1、为了解决上述问题,本发明提出了一种用于转轮除湿系统的除湿控制方法。
2、具体方案如下:
3、一种用于转轮除湿系统的除湿控制方法,包括以下步骤:
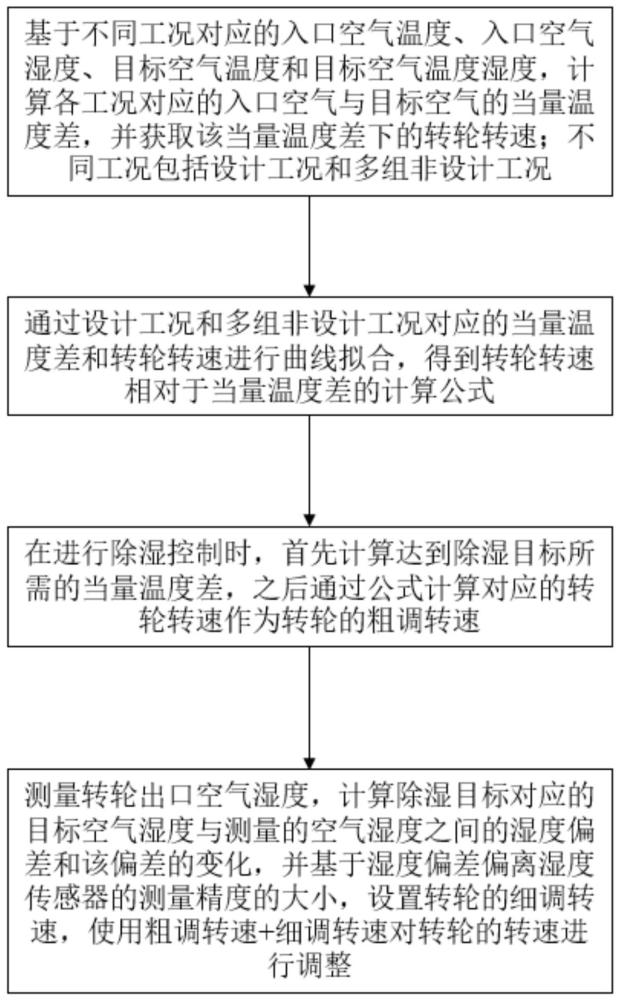
4、s1:基于不同工况对应的入口空气温度、入口空气湿度、目标空气温度和目标空气温度湿度,计算各工况对应的入口空气与目标空气的当量温度差,并获取该当量温度差下的转轮转速;不同工况包括设计工况和多组非设计工况;
5、s2:通过设计工况和多组非设计工况对应的当量温度差和转轮转速进行曲线拟合,得到转轮转速相对于当量温度差的计算公式;
6、s3:在进行除湿控制时,首先计算达到除湿目标所需的当量温度差,之后通过步骤s2的计算公式计算对应的转轮转速作为转轮的粗调转速;
7、s4:测量转轮出口空气湿度,计算除湿目标对应的目标空气湿度与测量的空气湿度之间的湿度偏差和该偏差的变化,并基于湿度偏差偏离湿度传感器的测量精度的大小,设置转轮的细调转速,使用粗调转速+细调转速对转轮的转速进行调整。
8、进一步的,空气的当量温度的计算公式为:
9、
10、其中, tt表示空气的当量温度, t表示空气的温度, h表示空气的湿度, qw表示水蒸气在吸附剂的吸附热, cpa表示空气的比热。
11、进一步的,用于曲线拟合的工况包括一组设计工况和三组非设计工况,对应的拟合函数为一元三次方程。
12、进一步的,基于湿度偏差偏离湿度传感器的测量精度的大小,设置转轮的细调转速的方法为:当湿度偏差偏离测量精度越大,细调转速的取值范围越大;当湿度偏差偏离测量精度越小,细调转速的取值范围越小。
13、进一步的,基于湿度偏差偏离湿度传感器的测量精度的大小,设置转轮的细调转速时分为三种工况:
14、工况1:湿度偏差满足|△ h|≤|a*eh|,其中,△ h表示湿度偏差,eh表示测量精度,a表示系数;
15、工况2:湿度偏差满足2*|a*eh|≥|△ h|>|a*eh|;
16、工况3:湿度偏差满足|△ h|>2*|a*eh|;
17、当处于工况1时,不进行转速调整;当处于工况3时,细调转速的取值范围大于工况2时细调转速的取值范围。
18、进一步的,当处于工况2时,除了考虑偏差△ h之外,还考虑偏差的变化e1,分为以下三种情况:
19、情况一:△ h>0,e1≥0,此时将转轮的转速调整为n-△n0,n表示转轮的粗调转速,△n0为工况2对应的细调转速的取值范围内的最大值;
20、情况二:△ h<0,e1≤0,此时将转轮的转速调整为n+△n0;
21、情况三:△ h×e1<0,此时利用pid控制对转轮的转速进行调整,调整范围限定在±△n0之内。
22、进一步的,当处于工况3时,将转轮的转速调整为n+1.5△n0或n-1.5△n0。
23、本发明采用如上技术方案,采用“粗调”+“细调”的控制方案,提高了转轮除湿控制的响应速度和稳定性。
技术特征:
1.一种用于转轮除湿系统的除湿控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的用于转轮除湿系统的除湿控制方法,其特征在于:空气的当量温度的计算公式为:
3.根据权利要求1所述的用于转轮除湿系统的除湿控制方法,其特征在于:用于曲线拟合的工况包括一组设计工况和三组非设计工况,对应的拟合函数为一元三次方程。
4.根据权利要求1所述的用于转轮除湿系统的除湿控制方法,其特征在于:基于湿度偏差偏离湿度传感器的测量精度的大小,设置转轮的细调转速的方法为:当湿度偏差偏离测量精度越大,细调转速的取值范围越大;当湿度偏差偏离测量精度越小,细调转速的取值范围越小。
5.根据权利要求4所述的用于转轮除湿系统的除湿控制方法,其特征在于:基于湿度偏差偏离湿度传感器的测量精度的大小,设置转轮的细调转速时分为三种工况:
6.根据权利要求5所述的用于转轮除湿系统的除湿控制方法,其特征在于:当处于工况2时,除了考虑偏差△h之外,还考虑偏差的变化e1,分为以下三种情况:
7.根据权利要求6所述的用于转轮除湿系统的除湿控制方法,其特征在于:当处于工况3时,将转轮的转速调整为n+1.5△n0或n-1.5△n0。
技术总结
本发明涉及一种用于转轮除湿系统的除湿控制方法,该方法包括:以转轮进口空气状态与目标空气状态的当量温度差为前馈控制的依据,基于设计工况和非设计工况的参数拟合转速与当量温度差之间的关系函数,得到转轮转速相对于当量温度差的计算式,作为转轮转速的粗调的根据,使转轮转速快速接近能够满足除湿量的转速。根据目标湿度与转轮出口湿度之间的偏差和该偏差的变化率,细调转轮的转速;基于湿度偏差偏离湿度传感器的测量精度的大小,对不同的偏差范围设置了不同的控制策略,在偏差较大时设置较大的变化范围,实现偏差的快速减小;在偏差较小时设置较小的变化范围,提高控制的稳定性。本发明提高了转轮除湿控制的响应速度和稳定性。
技术研发人员:郑超瑜,李鹏杰,章根斌,郑国杰,丁德锋,朱子文,林华建,陈庆鹏
受保护的技术使用者:集美大学
技术研发日:
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!