一种智能化冰箱的抓手多级伸缩取料机构的制作方法
本技术涉及取料机构的,特别是涉及一种智能化冰箱的抓手多级伸缩取料机构。
背景技术:
1、目前主要是人工方式进行样本的低温冰箱存储作业及管理,传统存储方式需要打开冰箱门对冰箱内部的温度及湿度环境影响,现有的智能化冰箱内的取料机构不能随意转动角度以及实现升降操作,需要对智能化冰箱内的取料机构进行改造升级,降低人工成本,提高生产作业的自动化程度。
技术实现思路
1、本实用新型针对现有技术的不足,本实用新型提供一种智能化冰箱的抓手多级伸缩取料机构,二级伸缩板和三级伸缩板同时滑动伸缩,便于对试管架的托取和运输,为使用带来极大的便利。
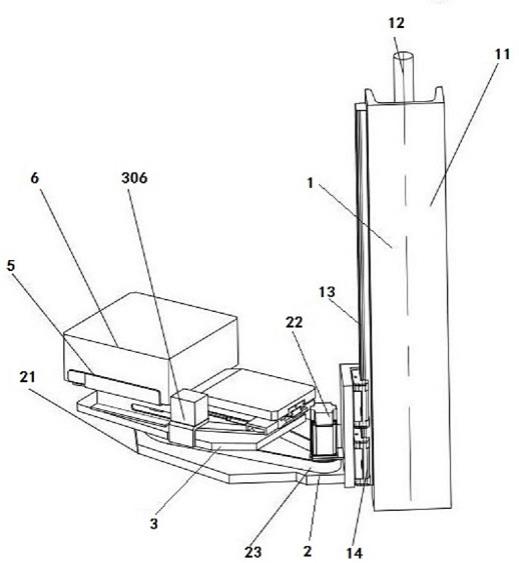
2、为解决上述技术问题,本实用新型采用的一个技术方案是一种智能化冰箱的抓手多级伸缩取料机构,包括:抓手升降驱动机构、设置于抓手升降驱动机构上的旋转驱动机构以及设置于旋转驱动机构上的多级取料机构,所述旋转驱动机构用于驱动多级取料机构旋转以方便抓手获取不同方向的试管架,所述多级取料机构包括一级转台板、二级伸缩板、三级伸缩板以及摆臂驱动组件,所述二级伸缩板与一级转台板之间通过第一滑轨实现滑动连接,所述三级伸缩板与二级转台板之间通过第二滑轨实现滑动连接,所述二级伸缩板的两侧分别设置有链轮链条组件,所述摆臂驱动组件包括设置于一级转台板的摆臂驱动电机以及摆臂,所述摆臂的一端与摆臂驱动电机相连接,另一端设置于所述二级伸缩板下方的滑槽内,所述摆臂驱动电机可驱动所述二级伸缩板及三级伸缩板的伸出和缩进运动。
3、在本实用新型一个较佳实施例中,所述链轮链条组件包括呈对角设置于二级伸缩板两侧边的链轮以及绕设于链轮上的链条a,所述链条a的一端与一级转台板相连接,所述链条a的另一端与三级伸缩板相连接。
4、在本实用新型一个较佳实施例中,所述抓手升降驱动机构包括升降立柱、设置于升降立柱上的滚珠丝杠模组以及设置于升降立柱侧边的导向滑轨以及与滑轨上的滑块相连接的固定板,所述滚珠丝杠模组与固定板相连接且可驱动所述固定板做升降运动。
5、在本实用新型一个较佳实施例中,所述旋转驱动机构包括与固定板相连接的底板、设置于底板上的转台驱动电机,所述转台驱动电机用于驱动多级取料机构旋转运动以抓手获取不同方向的试管架。
6、在本实用新型一个较佳实施例中,所述转台驱动电机的输出端通过皮带与设置于多级取料机构下方的转轴相连接。
7、本实用新型的有益效果是:本实用的智能化冰箱的抓手多级伸缩取料机构,抓手安装在多级取料机构上,依次伸出二级伸缩板和三级伸缩板,能够实现在智能冰箱内双深抓取试管架,便于对试管架的托取和运输,使用方便,可以实现全自动的生物样本低温存取操作,为使用带来极大的便利。
技术特征:
1.一种智能化冰箱的抓手多级伸缩取料机构,其特征在于,包括:抓手升降驱动机构、设置于抓手升降驱动机构上的旋转驱动机构以及设置于旋转驱动机构上的多级取料机构,所述旋转驱动机构用于驱动多级取料机构旋转以方便抓手获取不同方向的试管架,所述多级取料机构包括一级转台板、二级伸缩板、三级伸缩板以及摆臂驱动组件,所述二级伸缩板与一级转台板之间通过第一滑轨实现滑动连接,所述三级伸缩板与二级转台板之间通过第二滑轨实现滑动连接,所述二级伸缩板的两侧分别设置有链轮链条组件,所述摆臂驱动组件包括设置于一级转台板的摆臂驱动电机以及摆臂,所述摆臂的一端与摆臂驱动电机相连接,另一端设置于所述二级伸缩板下方的滑槽内,所述摆臂驱动电机可驱动所述二级伸缩板及三级伸缩板的伸出和缩进运动。
2.根据权利要求1所述的一种智能化冰箱的抓手多级伸缩取料机构,其特征在于,所述链轮链条组件包括呈对角设置于二级伸缩板两侧边的链轮以及绕设于链轮上的链条a,所述链条a的一端与一级转台板相连接,所述链条a的另一端与三级伸缩板相连接。
3.根据权利要求1所述的一种智能化冰箱的抓手多级伸缩取料机构,其特征在于,所述抓手升降驱动机构包括升降立柱、设置于升降立柱上的滚珠丝杠模组以及设置于升降立柱侧边的导向滑轨以及与滑轨上的滑块相连接的固定板,所述滚珠丝杠模组与固定板相连接且可驱动所述固定板做升降运动。
4.根据权利要求3所述的一种智能化冰箱的抓手多级伸缩取料机构,其特征在于,所述旋转驱动机构包括与固定板相连接的底板、设置于底板上的转台驱动电机,所述转台驱动电机用于驱动多级取料机构旋转运动以抓取不同方向的试管架。
5.根据权利要求4所述的一种智能化冰箱的抓手多级伸缩取料机构,其特征在于,所述转台驱动电机的输出端通过皮带与设置于多级取料机构下方的转轴相连接。
技术总结
本技术公开了一种智能化冰箱的抓手多级伸缩取料机构,包括:抓手升降驱动机构、旋转驱动机构及多级取料机构,多级取料机构包括一级转台板、二级伸缩板、三级伸缩板以及摆臂驱动组件,二级伸缩板与一级转台板之间通过第一滑轨实现滑动连接,三级伸缩板与二级转台板之间通过第二滑轨实现滑动连接,二级伸缩板的两侧分别设置有链轮链条组件,摆臂驱动组件包括设置于一级转台板的摆臂驱动电机及摆臂,摆臂的一端与摆臂驱动电机相连接,另一端设置于二级伸缩板下方的滑槽内,摆臂驱动电机可驱动二级伸缩板及三级伸缩板的伸出和缩进运动,本技术的多级伸缩取料机构,二级伸缩板和三级伸缩板同时滑动伸缩,便于对试管架的托取和运输。
技术研发人员:肖阳
受保护的技术使用者:上海葆能生物科技有限公司
技术研发日:20221202
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!