分置式斯特林制冷机控制器、控制方法、制冷机及热成像系统与流程
本发明属于制冷机,具体涉及一种分置式斯特林制冷机控制器、控制方法、制冷机及热成像系统。
背景技术:
1、分置式斯特林制冷机由于采用压缩机与膨胀机分离的结构方式,冷指远离了振动较大的压缩机端,振动对红外探测器的影响减小,并且其采用双活塞对置方式进行驱动,使得压缩机动子的动量得到平衡,结构简化,噪声和振动也大幅减小,从而提高了制冷机的可靠性。随着大面阵红外焦平面探测器的发展,红外热成像系统对大制冷量的分置式斯特林制冷机需求增加,这加速推动了大功率分置式斯特林制冷机驱动控制电路的发展。
2、分置式斯特林制冷机驱动控制器的功能即是通过控制模块、驱动模块和温度反馈等实现分置式斯特林制冷机的驱动和温度控制。电路的工作原理是采用交流电机的调幅调频调速原理,由处理器控制程序产生spwm波,通过电压提升和功率转换后生成两路功率驱动波,交替的通过直线电机的两组对置线圈,在线圈中产生同频反相的电磁推力,带动制冷机做功。
3、振动是影响机械制冷机应用和可靠性的一项关键因素,应用对振动指标、机械结构、功耗、可靠性等有严格要求,被动减振结构简单但效果有限,所以普遍采用主动减振技术。主动减振系统包括减振器、振动传感器和控制器,其核心是控制算法。现有技术中,分置式斯特林制冷机在高过载、高振动等要求较高的场合的应用依然具有局限性,且存在因撞缸而失效的问题,可靠性有待提高。
技术实现思路
1、为解决现有技术中的不足,本发明提供一种分置式斯特林制冷机控制器、控制方法、制冷机及热成像系统,能使分置式斯特林制冷机应用于对过载、振动等要求高的场合,并可完全避免分置式斯特林制冷机因撞缸带来的失效,大大提高分置式斯特林制冷机的可靠性。
2、为达到上述目的,本发明所采用的技术方案是:
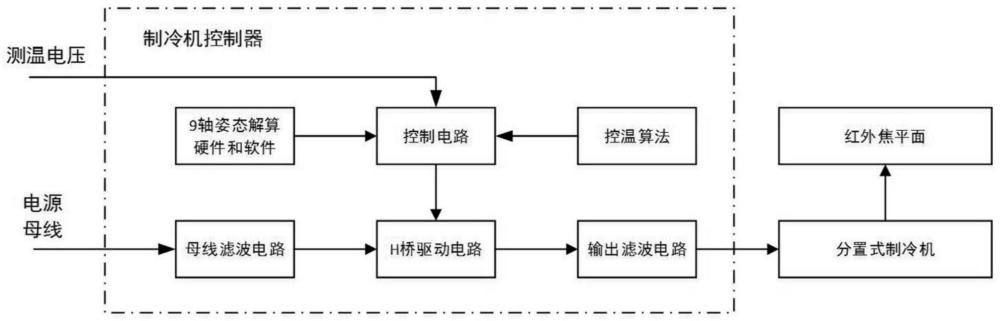
3、第一方面,提供一种分置式斯特林制冷机控制器,包括:用于感知分置式斯特林制冷机运行状态的九轴姿态解算模块,所述九轴姿态解算模块的输出端与控制电路的其中之一输入端连接;所述控制电路的其中之二输入端用于接收测温电压;所述控制电路的输出端与h桥驱动电路的其中之一输入端连接,从而驱动所述h桥驱动电路。
4、进一步地,还包括控温算法模块,所述控温算法模块与所述控制电路的其中之三输入端连接。
5、进一步地,还包括母线滤波电路,所述h桥驱动电路的其中之二输入端通过所述母线滤波电路与电源母线连接。
6、进一步地,还包括输出滤波电路,所述h桥驱动电路的输出端通过所述输出滤波电路与分置式斯特林制冷的控制端连接。
7、进一步地,所述分置式斯特林制冷机运行状态包括分置式斯特林制冷机和控制器组装姿态、振动频率、幅度和方向。
8、第二方面,提供一种分置式斯特林制冷机,所述分置式斯特林制冷机配置有第一方面所述的分置式斯特林制冷机控制器。
9、第三方面,提供一种分置式斯特林制冷机控制方法,基于第一方面所述的分置式斯特林制冷机控制器,所述方法包括:基于九轴姿态解算模块获取分置式斯特林制冷机和控制器组装姿态、振动频率、幅度和方向,并进行实时计算,获得姿态解算结果;根据姿态解算结果、分置式斯特林制冷机特性、测温电压和控温算法,驱动h桥驱动电路。
10、第四方面,提供一种红外热成像系统,所述红外热成像系统配置有第二方面所述的分置式斯特林制冷机。
11、与现有技术相比,本发明所达到的有益效果:本发明通过用于感知分置式斯特林制冷机运行状态的九轴姿态解算模块的输出端与控制电路的其中之一输入端连接;控制电路的其中之二输入端用于接收测温电压;控制电路的输出端与h桥驱动电路的其中之一输入端连接,从而驱动h桥驱动电路,能使分置式斯特林制冷机应用于对过载、振动等要求高的场合。
技术特征:
1.一种分置式斯特林制冷机控制器,其特征在于,包括:
2.根据权利要求1所述的分置式斯特林制冷机控制器,其特征在于,还包括控温算法模块,所述控温算法模块与所述控制电路的其中之三输入端连接。
3.根据权利要求1所述的分置式斯特林制冷机控制器,其特征在于,还包括母线滤波电路,所述h桥驱动电路的其中之二输入端通过所述母线滤波电路与电源母线连接。
4.根据权利要求1所述的分置式斯特林制冷机控制器,其特征在于,还包括输出滤波电路,所述h桥驱动电路的输出端通过所述输出滤波电路与分置式斯特林制冷的控制端连接。
5.根据权利要求1所述的分置式斯特林制冷机控制器,其特征在于,所述分置式斯特林制冷机运行状态包括分置式斯特林制冷机和控制器组装姿态、振动频率、幅度和方向。
6.一种分置式斯特林制冷机,其特征在于,所述分置式斯特林制冷机配置有权利要求1~5任一项所述的分置式斯特林制冷机控制器。
7.一种分置式斯特林制冷机控制方法,其特征在于,基于权利要求1~5任一项所述的分置式斯特林制冷机控制器,所述方法包括:
8.一种红外热成像系统,其特征在于,所述红外热成像系统配置有权利要求6所述的分置式斯特林制冷机。
技术总结
本发明公开了一种分置式斯特林制冷机控制器、控制方法、制冷机及热成像系统,分置式斯特林制冷机控制器,包括:用于感知分置式斯特林制冷机运行状态的九轴姿态解算模块,所述九轴姿态解算模块的输出端与控制电路的其中之一输入端连接;所述控制电路的其中之二输入端用于接收测温电压;所述控制电路的输出端与H桥驱动电路的其中之一输入端连接,从而驱动所述H桥驱动电路。本发明能使分置式斯特林制冷机应用于对过载、振动等要求高的场合,并可完全避免分置式斯特林制冷机因撞缸带来的失效,大大提高分置式斯特林制冷机的可靠性。
技术研发人员:张勇,路晓,言行果
受保护的技术使用者:中国兵器工业集团第二一四研究所苏州研发中心
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!