一种管道激光除漆机器人
1.本实用新型涉及激光除漆领域,具体为一种管道激光除漆机器人。
背景技术:
2.野外管道除漆面临着交通不便、电力不通、环境恶劣、操作危险等问题,传统的野外管道除漆方式多为人工除漆,不仅费时费力、质量差、效率低;而且操作人员的安全性不易保障、人工成本高,因此,迫切需要一种可实现自动除漆的机器人来替代人工除漆,实现野外管道除漆的智能化、自动化,保障除漆的效率和人员的安全性。
技术实现要素:
3.针对现有技术的不足,本实用新型公开了一种管道激光除漆机器人,采用激光除漆快速除去管道上的油漆,提高了除漆效率。
4.本专利的目的是这样实现的:一种管道激光除漆机器人,其特征在于,包括机器人主体、机械臂和激光除漆装置,所述机器人主体与所述机械臂固定连接,所述激光除漆装置与所述机械臂活动连接。
5.作为优选,所述机器人主体包括信号接收装置、驱动装置、弹簧、橡胶式履带、轮对、机器人框架、伸缩轴,所述信号接收装置固定在所述驱动装置上,安装在所述机器人框架上的所述驱动装置用于驱动所述轮对与所述橡胶式履带在管道上运动,所述弹簧固定在所述伸缩轴上,安装在所述机器人框架上的所述伸缩轴通过信号接受装置可自动调节轮对的角度,使管道激光除漆越障机器人在不同直径大小的管道上平稳爬行。
6.作为优选,所述机械臂包括基座、螺杆、螺母、气缸、第一连接杆、第二连接杆、第三连接杆、操作臂,所述基座被所述螺杆和所述螺母固定在所述机器人主体上,所述气缸和所述基座相连接,所述第一连接杆安装在所述气缸上,所述第二连接杆与所述第一连接杆固定连接,所述第三连接杆与所述第二连接杆活动连接,所述操作臂安装在所述第三连接杆上。
7.作为优选,所述激光除漆装置包括连接端、除漆装置框架、半圆弧齿轮导轨、滑槽、传动装置、电机、激光除漆头、滑轮、齿轮,所述连接端固定在所述除漆装置框架上,所述半圆弧齿轮导轨和所述滑槽安装在所述除漆装置框架上,所述传动装置与所述电机相连接,带动所述齿轮和所述滑轮运动,所述齿轮在所述半圆弧齿轮导轨上运动,所述滑轮在所述滑槽上运动,所述激光除漆头固定在所述传动装置的表面。
8.有益效果:本实用新型可实现在管道上移动且越障,操作人员可远程操控,实现对管道的激光自动除漆,具有智能化、除漆效率高、安全性好等优点。
附图说明
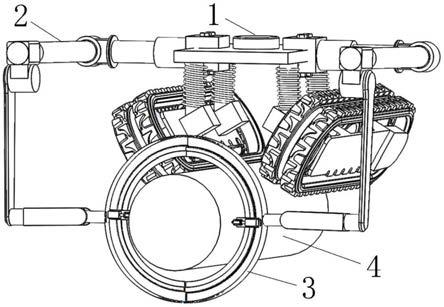
9.图1为本实用新型一种管道激光除漆机器人的整体结构示意图;
10.图2为本实例机器人主体左视图;
11.图3为本实例机器人主体结构示意图;
12.图4为本实例机械臂的结构示意图;
13.图5为本实例激光除漆装置的结构示意图;
14.图6为本实例激光除漆装置的部分结构示意图;
15.现在结合附图对本实用新型做进一步的说明。
16.附图标记:
17.1、机器人;2、机械臂;3、激光除漆装置;4、管道;101、信号接收装置; 102、驱动装置;103、弹簧;104、橡胶式履带;105、轮对;106、机器人框架; 107、伸缩轴;201、基座;202、螺杆;203、螺母;204、气缸;205、第一连接杆;206、第二连接杆;207、第三连接杆;208、操作臂;301、连接端;302、除漆装置框架;303、半圆弧齿轮导轨;304、滑槽;305、传动装置;306、电机;307、激光除漆头;308、滑轮;309、齿轮;
具体实施方式
18.下面将结合本发明实施例中附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部实施例
19.下面结合附图1-6和具体实施例对本实用新型进一步说明。
20.如图1所示,本实施例提供的一种管道激光除漆机器人,包括机器人主体1、机械臂2和激光除漆装置3。如图2和图3所示,机器人主体1包括信号接收装置101、驱动装置102、弹簧103、橡胶式履带104、轮对105、机器人框架106、伸缩轴107,信号接收装置101固定于驱动装置102上,安装于机器人框架106 上的驱动装置102用于驱动轮对105与橡胶式履带104在管道4上运动,弹簧 103固定于伸缩轴107上,安装于机器人框架106上的伸缩轴107通过信号接受装置101可自动调节轮对105的角度,使管道激光除漆机器人在不同直径大小的管道4上平稳爬行。
21.如图4和图5所示,所述机械臂2包括基座201、螺杆202、螺母203、气缸204、第一连接杆205、第二连接杆206、第三连接杆207、操作臂208,基座201被螺杆202和螺母203固定在机器人主体1上,气缸204和基座201相连接,第一连接杆205安装在气缸204上,第二连接杆206与第一连接杆205 固定连接,第三连接杆207与第二连接杆206活动连接,操作臂208安装在第三连接杆207上。
22.如图6所示,所述激光除漆装置3包括连接端301、除漆装置框架302、半圆弧齿轮导轨303、滑槽304、传动装置305、电机306、激光除漆头307、滑轮 308、齿轮309,连接端301固定在除漆装置框架302上,半圆弧齿轮导轨303 和滑槽304安装在除漆装置框架302上,传动装置305与电机306相连接,带动齿轮309和滑轮308运动,齿轮309在半圆弧齿轮导轨303上运动,滑轮308 在滑槽304上运动,激光除漆头307固定在传动装置305的表面。
23.使用时,将管道激光除漆机器人放在管道4上,机器人主体1上的信号接收装置101接收工作指令,伸缩轴107开始自动调节轮对105的角度,驱动装置102驱动轮对105与橡胶式履带104在管道4上爬行,气缸204推动第一连接杆205,带动第二连接杆206和第三连接杆207,使激光除漆装置3嵌套在管道4上,自动旋转操作臂208,使激光除漆装置3处于最佳除漆位置,电机306 开始启动,传动装置305带动齿轮309和滑轮308,分别在半圆弧齿轮轨道303 和滑槽304上同步做旋转运动,激光除漆头307围绕管道4进行除漆。
24.以上的仅是本实用新型的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本实用新型构思的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围。
技术特征:
1.一种管道激光除漆机器人,包括机器人主体、机械臂和激光除漆装置,其特征在于:所述机器人主体与所述机械臂固定连接,所述激光除漆装置与所述机械臂活动连接;所述机器人主体包括信号接收装置、驱动装置、弹簧、橡胶式履带、轮对、机器人框架、伸缩轴,所述信号接收装置固定在所述驱动装置上,安装在所述机器人框架上的所述驱动装置用于驱动所述轮对与所述橡胶式履带在管道上运动,所述弹簧固定在所述伸缩轴上,安装在所述机器人框架上的所述伸缩轴通过信号接受装置可自动调节轮对的角度,使管道激光除漆越障机器人在不同直径大小的管道上平稳爬行;所述机械臂包括基座、螺杆、螺母、气缸、第一连接杆、第二连接杆、第三连接杆、操作臂,所述基座被所述螺杆和所述螺母固定在所述机器人主体上,所述气缸和所述基座相连接,所述第一连接杆安装在所述气缸上,所述第二连接杆与所述第一连接杆固定连接,所述第三连接杆与所述第二连接杆活动连接,所述操作臂安装在所述第三连接杆上;所述激光除漆装置包括连接端、除漆装置框架、半圆弧齿轮导轨、滑槽、传动装置、电机、激光除漆头、滑轮、齿轮,所述连接端固定在所述除漆装置框架上,所述半圆弧齿轮导轨和所述滑槽安装在所述除漆装置框架上,所述传动装置与所述电机相连接,带动所述齿轮和所述滑轮运动,所述齿轮在所述半圆弧齿轮导轨上运动,所述滑轮在所述滑槽上运动,所述激光除漆头固定在所述传动装置的表面。
技术总结
本实用新型公开了一种管道激光除漆机器人,包括机器人主体、机械臂和激光除漆装置。机器人主体上的信号接收装置接收工作指令,伸缩轴开始自动调节轮对的角度,驱动装置驱动轮对与橡胶式履带在管道上爬行,气缸推动第一连接杆,带动第二连接杆和第三连接杆,使激光除漆装置嵌套在管道上,自动旋转操作臂,使激光除漆装置处于最佳除漆位置,电机开始启动,传动装置带动齿轮和滑轮,分别在半圆弧齿轮轨道和滑槽上同步做旋转运动,激光除漆头围绕管道进行除漆。本实用新型可实现在管道上移动,操作人员可远程操控,对管道进行激光自动除漆,具有智能化、除漆效率高、安全性好等优点。安全性好等优点。安全性好等优点。
技术研发人员:谷大鹏 唐仲鹏 刘轲 陈素文 李志 刘锦图
受保护的技术使用者:燕山大学
技术研发日:2021.11.30
技术公布日:2022/4/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1