储罐内壁清洗设备的制作方法
本领域涉及lng储罐领域,具体涉及储罐自动清洗领域。
背景技术:
1、大型lng储罐内罐直径可达84m,储罐本体施工完成后需要进行灌水进行水压试验。在试验结束后的排水过程中,需要对罐壁及罐内管道、管道支架、加强圈进行清洗。
2、目前lng储罐内壁清洗均采用制作临时浮伐人工清洗,该清洗工作为密闭空间水面作业,施工作业环境差、劳动强度高,且存在一定的安全风险。
3、由于储罐本体施工完成后,罐内处于一密闭环境,从储罐外部较难检测到罐内设备的运行状态,因此增加了工作的不可预知性,且水位高度可达二十多米,也增加了工作人员的安全风险。
技术实现思路
1、本发明的一个目的是提供一种储罐内壁清洗设备,能够安全可靠的实现内壁的自动清洗。
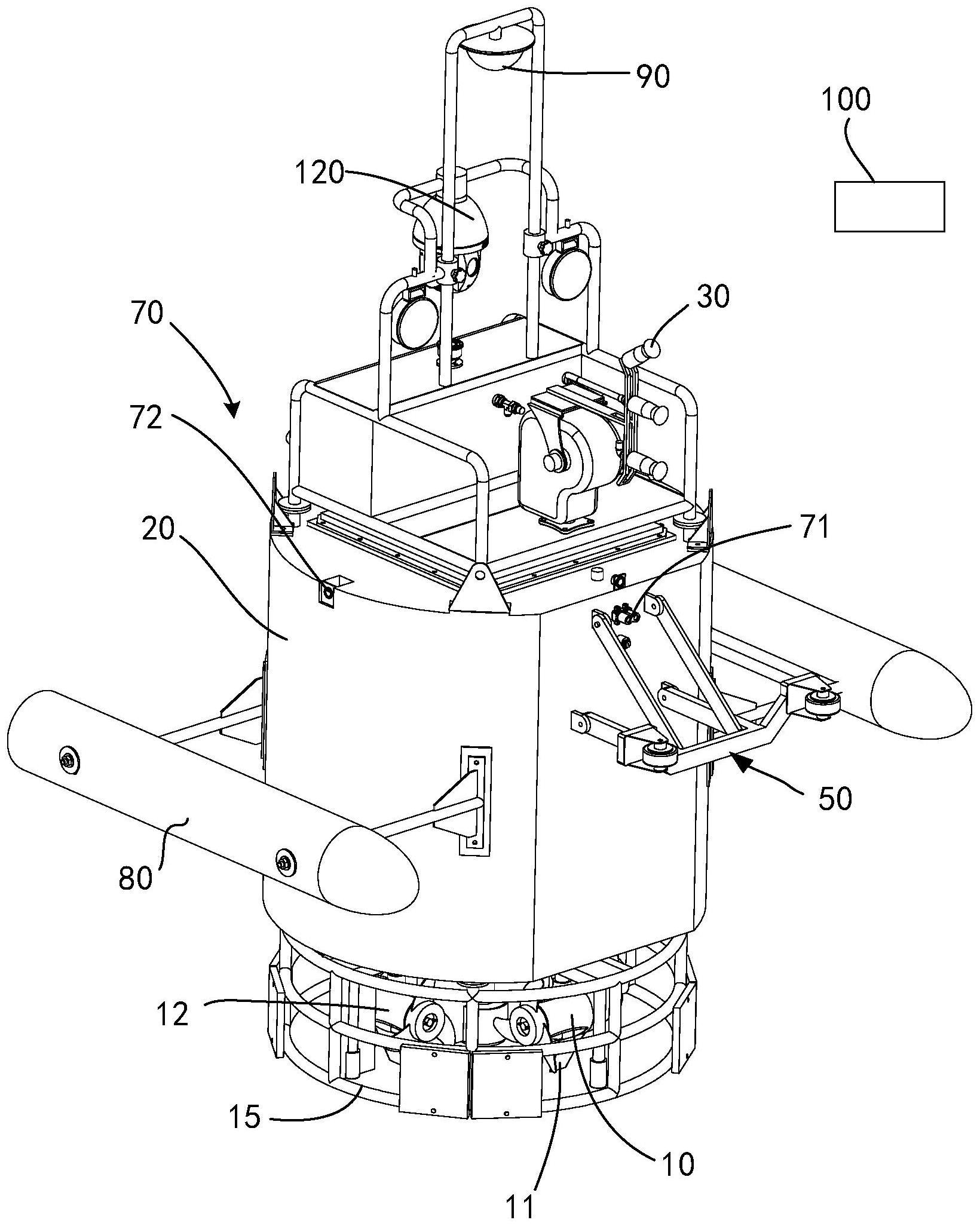
2、为实现上述目的的储罐内壁清洗设备用于清洗lng储罐内壁,该设备包括舱体、清洗系统、动力系统和控制系统。
3、清洗系统设置在所述舱体上,用于清洗储罐内壁;动力系统设置在所述舱体上,用于推动所述舱体沿罐壁移动,包括主推进器组件和从推进器组件,所述主推进器组件的推进方向与所述从推进器组件的推进方向正交,所述主推进器组件用于提供行进动力,所述从推进器组件用于凭借与所述主推进器组件的主推进方向正交的从推进方向实现所述舱体贴紧储罐内壁的移动;控制系统用于控制所述动力系统和所述清洗系统。
4、在一个或多个实施例中,该储罐内壁清洗设备还包括多个浮筒,所述多个浮筒环绕所述舱体侧壁设置。
5、在一个或多个实施例中,所述储罐内壁清洗设备还包括电子罗盘,所述电子罗盘能够向所述控制系统传递信号。
6、在一个或多个实施例中,该储罐内壁清洗设备还包括避障感知系统,所述避障感知系统包括多个超声波障碍物传感器,分别环绕所述舱体设置。
7、在一个或多个实施例中,所述避障感知系统还包括激光测距仪和超声波水深传感器。
8、在一个或多个实施例中,所述储罐内壁清洗设备还包括远程控制中心,所述远程控制中心与所述控制系统双向信号连接,并能够接收人工操作指令。
9、在一个或多个实施例中,所述控制系统被配置成,能够收集所述避障感知系统和清洗系统的数据信息,并能够综合来自所述远程控制中心的外部指令和所述数据信息进行分析运算并作出反馈指令。
10、在一个或多个实施例中,该储罐内壁清洗设备还包括摄像系统。
11、在一个或多个实施例中,该储罐内壁清洗设备还包括导向轮组件,所述导向轮组件设置在所述舱体外周,包括由舱体外周向外延伸的滚轮。
12、在一个或多个实施例中,该储罐内壁清洗设备还包括供电系统,所述供电系统包括主电池和副电池,所述副电池被设置成能够在所述主电池用尽后自动开启供电。
13、在一个或多个实施例中,所述清洗系统包括喷枪基座和多个喷枪,所述多个喷枪设置在所述喷枪基座上,所述喷枪基座能够旋转。
14、在一个或多个实施例中,所述清洗系统还包括电动钢丝刷。
15、在一个或多个实施例中,所述舱体的外周面呈弧面和/或平面。
16、在一个或多个实施例中,所述舱体还包括探照灯。
17、在一个或多个实施例中,该储罐内壁清洗设备包括自动巡航清洗模式,
18、在所述自动巡航清洗模式下,所述主推进器组件和所述从推进器组件的推进参数为恒定,凭借环形罐壁对所述舱体的持续阻挡实现所述储罐内壁清洗设备贴紧所述罐壁的环形运行。
19、在一个或多个实施例中,该储罐内壁清洗设备包括手动遥控清洗模式,在所述手动遥控清洗模式下,所述动力系统的推进参数由所述远程控制中心输入的人工操作指令实时控制。
20、上述储罐内壁清洗设备凭借主推进器组件和从推进器组件的配合,实现舱体在具有一定深度的储罐内的贴罐壁安全移动,并凭借避障感知系统实时探测清洗船周围障碍物的距离,有效避免误操作造成设备损坏,还可以通过控制中心控制储罐内壁清洗设备的整体运行。
21、因此,使用上述储罐内壁清洗设备可以取代人工清洗的环节,降低了工作人员长时间在罐内作业的劳动强度,也降低了在罐内壁进行清洗的风险。
技术特征:
1.储罐内壁清洗设备,用于清洗lng储罐内壁,其特征在于,包括:
2.如权利要求1所述的储罐内壁清洗设备,其特征在于,该储罐内壁清洗设备还包括多个浮筒(80),所述多个浮筒(80)环绕所述舱体(20)侧壁设置。
3.如权利要求1所述的储罐内壁清洗设备,其特征在于,所述储罐内壁清洗设备还包括电子罗盘(60),所述电子罗盘(60)能够向所述控制系统(40)传递信号。
4.如权利要求1所述的储罐内壁清洗设备,其特征在于,该储罐内壁清洗设备还包括避障感知系统(70),所述避障感知系统包括多个超声波障碍物传感器(72),分别环绕所述舱体(20)设置,并与所述控制系统(40)信号连接。
5.如权利要求4所述的储罐内壁清洗设备,其特征在于,所述避障感知系统(70)还包括激光测距仪(71)和超声波水深传感器(73)。
6.如权利要求4所述的储罐内壁清洗设备,其特征在于,所述储罐内壁清洗设备还包括远程控制中心(100),所述远程控制中心(100)与所述控制系统(40)双向信号连接,并能够接收人工操作指令。
7.如权利要求6所述的储罐内壁清洗设备,其特征在于,所述控制系统(40)被配置成,能够收集所述避障感知系统(70)和清洗系统(30)的数据信息,并能够综合来自所述远程控制中心(100)的外部指令和所述数据信息进行分析运算并作出反馈指令。
8.如权利要求1所述的储罐内壁清洗设备,其特征在于,该储罐内壁清洗设备还包括摄像系统(120)。
9.如权利要求1所述的储罐内壁清洗设备,其特征在于,该储罐内壁清洗设备还包括导向轮组件(50),所述导向轮组件(50)设置在所述舱体(20)外周,包括由舱体外周向外延伸的滚轮(51)。
10.如权利要求1所述的储罐内壁清洗设备,其特征在于,该储罐内壁清洗设备还包括供电系统(110),所述供电系统包括主电池和副电池,所述副电池被设置成能够在所述主电池用尽后自动开启供电。
11.如权利要求1所述的储罐内壁清洗设备,其特征在于,所述清洗系统(30)包括喷枪基座(33)和多个喷枪(31),所述多个喷枪(31)设置在所述喷枪基座(33)上,所述喷枪基座(33)能够旋转。
12.如权利要求11所述的储罐内壁清洗设备,其特征在于,所述清洗系统(30)还包括电动钢丝刷(37)。
13.如权利要求1所述的储罐内壁清洗设备,其特征在于,所述舱体(20)的外周面呈弧面和/或平面。
14.如权利要求1所述的储罐内壁清洗设备,其特征在于,所述舱体(20)还包括探照灯(90)。
15.如权利要求1所述的储罐内壁清洗设备,其特征在于,该储罐内壁清洗设备包括自动巡航清洗模式,
16.如权利要求6所述的储罐内壁清洗设备,其特征在于,该储罐内壁清洗设备包括手动遥控清洗模式,
技术总结
提供一种用于清洗LNG储罐内壁的储罐内壁清洗设备,包括舱体、清洗系统、动力系统和控制系统,清洗系统设置在舱体上,用于清洗储罐内壁;动力系统设置在舱体上,用于推动舱体沿罐壁移动,包括主推进器组件和从推进器组件,主推进器组件的推进方向与从推进器组件的推进方向正交,主推进器组件用于提供行进动力,从推进器组件用于凭借与主推进器组件的主推进方向正交的从推进方向实现舱体贴紧储罐内壁的移动;控制系统用于控制动力系统和清洗系统。上述储罐内壁清洗设备能够实现对LNG储罐内壁的自动清洗。
技术研发人员:陈金强,王树昂,赵飞,宁敦超,陈华桥,郭鹏亮,郑恒,孔凡波
受保护的技术使用者:中国核工业第五建设有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!