一种自动化高空作业清洗装置
1.本发明涉及一种自动化高空作业清洗装置。
背景技术:
2.现有技术中,各类商业广场上的高空牌匾在进行清理时,往往需要作业人员搭建脚手架后由人工爬至脚手架上进行高空作业,人工劳动强度大,且存在一定的安全隐患。
技术实现要素:
3.本发明主要解决的技术问题是提供一种自动化高空作业清洗装置,结构简单、合理、可靠,采用集成式设置,移动方便,自动化程度高,无作业风险,有效降低劳动强度,提高作业效率。
4.为解决上述技术问题,本发明采用的一个技术方案是:提供一种自动化高空作业清洗装置,包括板车、控制面板、液压升降机、作业平台、多轴机器人和清洁模组,所述板车上表面对应固定设置有控制面板和液压升降机,所述作业平台固定设置于液压升降机的升降平台上,所述多轴机器人固定设置于作业平台上表面中间,所述多轴机器人的活动端端部设置有真空吸头,所述作业平台的上表面边沿对应设置有储藏工位,所述清洁模组设置于作业平台的储藏工位上,所述清洁模组上还对应设置有吸板与真空吸头对应吸附连接。
5.在本发明一个较佳实施例中,所述板车底部设置有多个地脚螺栓。
6.在本发明一个较佳实施例中,所述板车一侧铰接设置有拖车连杆。
7.在本发明一个较佳实施例中,所述储藏工位设置有多个,包括第一储藏工位、第二储藏工位和第三储藏工位。
8.在本发明一个较佳实施例中,所述清洁模组包括带水箱的清水喷淋头、带清洁剂的泡沫喷淋头和清洁刮板。
9.在本发明一个较佳实施例中,所述带水箱的清水喷淋头、带清洁剂的泡沫喷淋头和清洁刮板上分别设置有吸板。
10.在本发明一个较佳实施例中,所述带水箱的清水喷淋头、带清洁剂的泡沫喷淋头和清洁刮板分别对应设置于第一储藏工位、第二储藏工位和第三储藏工位上。
11.本发明的有益效果是:本发明指出的一种自动化高空作业清洗装置,结构简单、合理、可靠,采用集成式设置,移动方便,自动化程度高,无作业风险,有效降低劳动强度,提高作业效率。
附图说明
12.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
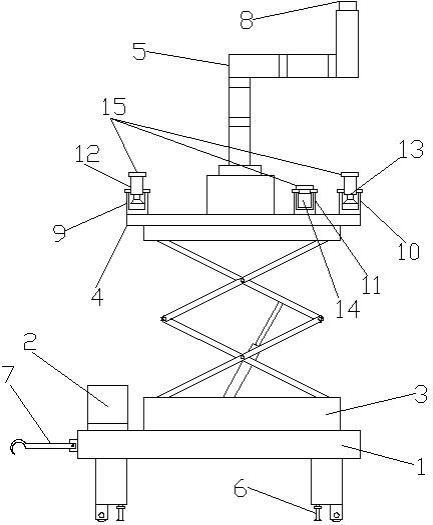
图1是本发明一种自动化高空作业清洗装置一较佳实施例的结构示意图。
具体实施方式
13.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
14.请参阅图1所示,本发明实施例包括:一种自动化高空作业清洗装置,包括板车1、控制面板2、液压升降机3、作业平台4、多轴机器人5和清洁模组。
15.其中,板车1可方便移动,可便于工作人员移动至作业处进行高空作业。
16.所述板车1底部设置有多个地脚螺栓6,在移动至作业位置后固定地脚螺栓6,保证板车1的固定稳定,以保证作业时的稳定性和安全性。
17.所述板车1一侧铰接设置有拖车连杆7,板车1可通过拖车连杆7固定在汽车或其他交通工具后部,随车通行,无需搬运,降低劳动强度。
18.所述板车1上表面对应固定设置有控制面板2和液压升降机3,控制面板2用于各部件参数的设定和控制,液压升降机3用于高度调节。
19.所述作业平台4固定设置于液压升降机3的升降平台上,随液压升降机3进行升降,方便不同高度的作业。
20.所述多轴机器人5固定设置于作业平台4上表面中间,多轴机器人5根据工作人员设定参数对作业面进行有序的清理作业。
21.所述多轴机器人5的活动端端部设置有真空吸头8,用于吸附作业工具。
22.所述作业平台4的上表面边沿对应设置有多个储藏工位,包括第一储藏工位9、第二储藏工位10和第三储藏工位11,用于放置不同的作业工具。
23.所述清洁模组包括带水箱的清水喷淋头12、带清洁剂的泡沫喷淋头13和清洁刮板14,所述带水箱的清水喷淋头12、带清洁剂的泡沫喷淋头13和清洁刮板14分别对应设置于第一储藏工位9、第二储藏工位10和第三储藏工位11上,带水箱的清水喷淋头12用于对作业面进行喷淋湿润及后期的清洗,带清洁剂的泡沫喷淋头13用于多喷淋湿润后的作业面喷洒清洁泡沫以方便作业面的清洁,所述清洁刮板14用于对清洗后的作业面进行去水刮除,保证作业面的干净整洁。
24.所述带水箱的清水喷淋头12、带清洁剂的泡沫喷淋头13和清洁刮板14上分别设置有吸板15,多轴机器人5根据作业顺序依次吸附各清洁模组的部件,更换时各清洁模组的部件有序放至初始位置。
25.综上所述,本发明指出的一种自动化高空作业清洗装置,结构简单、合理、可靠,采用集成式设置,移动方便,自动化程度高,无作业风险,有效降低劳动强度,提高作业效率。
26.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
技术特征:
1.一种自动化高空作业清洗装置,其特征在于,包括板车、控制面板、液压升降机、作业平台、多轴机器人和清洁模组,所述板车上表面对应固定设置有控制面板和液压升降机,所述作业平台固定设置于液压升降机的升降平台上,所述多轴机器人固定设置于作业平台上表面中间,所述多轴机器人的活动端端部设置有真空吸头,所述作业平台的上表面边沿对应设置有储藏工位,所述清洁模组设置于作业平台的储藏工位上,所述清洁模组上还对应设置有吸板与真空吸头对应吸附连接。2.根据权利要求1所述的自动化高空作业清洗装置,其特征在于,所述板车底部设置有多个地脚螺栓。3.根据权利要求1所述的自动化高空作业清洗装置,其特征在于,所述板车一侧铰接设置有拖车连杆。4.根据权利要求1所述的自动化高空作业清洗装置,其特征在于,所述储藏工位设置有多个,包括第一储藏工位、第二储藏工位和第三储藏工位。5.根据权利要求4所述的自动化高空作业清洗装置,其特征在于,所述清洁模组包括带水箱的清水喷淋头、带清洁剂的泡沫喷淋头和清洁刮板。6.根据权利要求5所述的自动化高空作业清洗装置,其特征在于,所述带水箱的清水喷淋头、带清洁剂的泡沫喷淋头和清洁刮板上分别设置有吸板。7.根据权利要求6所述的自动化高空作业清洗装置,其特征在于,所述带水箱的清水喷淋头、带清洁剂的泡沫喷淋头和清洁刮板分别对应设置于第一储藏工位、第二储藏工位和第三储藏工位上。
技术总结
本发明公开了一种自动化高空作业清洗装置,包括板车、控制面板、液压升降机、作业平台、多轴机器人和清洁模组,所述板车上表面对应固定设置有控制面板和液压升降机,所述作业平台固定设置于液压升降机的升降平台上,所述多轴机器人固定设置于作业平台上表面中间,所述多轴机器人的活动端端部设置有真空吸头,所述作业平台的上表面边沿对应设置有储藏工位,所述清洁模组设置于作业平台的储藏工位上,所述清洁模组上还对应设置有吸板与真空吸头对应吸附连接。本发明结构简单、合理、可靠,采用集成式设置,移动方便,自动化程度高,无作业风险,有效降低劳动强度,提高作业效率。提高作业效率。提高作业效率。
技术研发人员:董小丹
受保护的技术使用者:沙洲职业工学院
技术研发日:2022.04.28
技术公布日:2022/7/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1