一种坝体表面污损附着物清除机器人的制作方法
本发明涉及一种污损附着物清除机器人,属于水利工程。
背景技术:
1、水坝是一种拦截江河渠道以抬高水位或调节流量的挡水建筑物,它用于可形成水库,抬高水位、调节径流、集中水头,用于防洪、供水、灌溉、水利发电、改善航运等,水坝是水利工程中重要的大型建筑设施之一;水坝的坝体表面由于常年被水流反复浸润,因此有大量污损附着物,如果不及时清理,会使坝体表面受到侵蚀产生露点,严重危害水坝的正常运行;目前,坝体表面污损附着物的清除工作都是由水利工作人员进行人工清除,不仅增加人力物力的消耗,而且存在较大安全隐患。
技术实现思路
1、本发明为解决坝体表面污损附着物的清除工作都是由水利工作人员进行人工清除,不仅增加人力物力的消耗,而且存在较大安全隐患的问题,进而提出一种坝体表面污损附着物清除机器人。
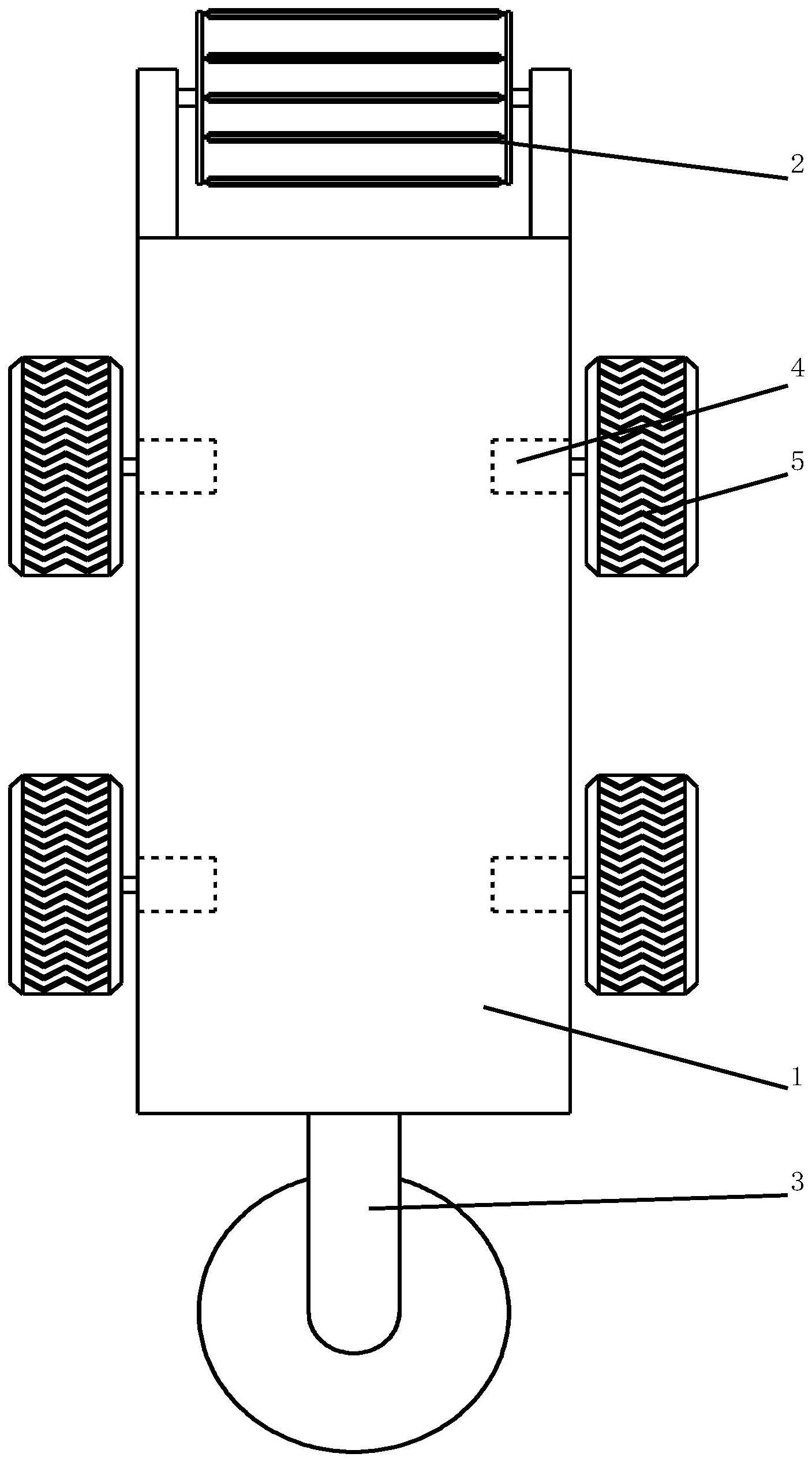
2、本发明为解决上述问题采取的技术方案是:本发明包括主体、刮扫机构、清洗刷机构、重心调节机构、四个驱动电机和四个防滑轮;主体前部的两侧对称设有两个驱动电机,主体后部的两侧对称设有两个驱动电机,每个驱动电机的电机轴上均同轴固定套装一个防滑轮,刮扫机构安装在主体的前端,清洗刷机构安装在主体的后端,所述重心调节机构安装在主体内。
3、进一步的,刮扫机构包括主轴、副轴、驱动组件、左侧框、右侧框、左支臂、右支臂、两个第一高度调节组件和多个活动刮扫组件;左支臂和右支臂并排平行设置在主体的前端,左支臂的后端通过一个所述第一高度调节组件与主体的前端面连接,右支臂的后端通过另一个第一高度调节组件与主体的前端面连接,左侧框和右侧框并排设置在左支臂与右支臂之间,左侧框外表面的中部通过副轴与左支臂前端的内测转动连接,右侧框外表面的中部通过主轴与右支臂前端的内侧面转动连接,所述驱动驱动组件安装在右支臂内,所述驱动组件与主轴连接,多个所述活动刮扫组件沿圆周方向均布设置在左侧框与右侧框之间,所述活动刮扫组件的左端与左侧框的内侧面连接,所述活动刮扫组件的右端与右侧框的内侧面连接。
4、进一步的,所述驱动组件包括刮扫驱动电机、传动轴、主齿轮和从动齿轮;驱动电机固定安装在右支臂内,传动轴的后端与驱动电机的电机轴同轴固定连接,主齿轮同轴固定套装在传动轴的前端,从动齿轮同轴固定套装在主轴上,从动齿轮与主齿轮啮合。
5、进一步的,所述第一高度调节组件包括第一电动推杆和第一缓冲单元;第一电动推杆的固定端与主体的前端面转动连接,第一电动推杆的伸缩端与所述第一缓冲单元转动连接,左支臂的后端与主体的前端面转动连接,右支臂的后端与主体的前端转动连接。
6、进一步的,所述第一缓冲单元包括第一平板、两个第一螺柱、两个第一螺母和两个第一弹簧;第一平板的上表面与第一电动推杆的伸缩端转动连接,两个第一螺柱并排设置,且第一螺柱的轴线与第一平板的下表面垂直,第一螺柱的上部插装在第一平板下表面的通孔内,且第一螺柱能沿所述通孔上下直线移动,第一螺母套装在第一螺柱上,且第一螺母位于第一平板的上表面,第一弹簧套装在第一螺柱上,且第一弹簧位于第一平板的下表面,第一螺柱的下端与左支臂或右支臂的上表面固定连接。
7、进一步的,所述活动刮扫组件包括刮扫辊和刮扫轴,刮扫轴的左端与左侧框的内侧面固定连接,刮扫轴的右端与右侧框的内侧面固定连接,刮扫辊套装在刮扫轴上,且刮扫辊能以刮扫轴为轴线转动。
8、进一步的,清洗刷机构包括第二高度调节组件、清洗刷悬臂、清洗刷电机、电机壳和清洗刷;清洗刷悬臂的前端与主体的后端面转动连接,电机壳固定安装在清洗刷悬臂的后端,清洗刷电机固定安装在电机壳内,且清洗刷电机的电机轴朝下,清洗刷固定套装在清洗刷电机的电机轴上,清洗刷悬臂通过所述第二高度调节组件与主体的后端连接。
9、进一步的,所述第二高度调节组件包括第二电动推杆、第二平板、两个第二螺柱、两个第二螺母和两个第二弹簧;第二电动推杆的固定端与主体的后端面转动连接,第二电动推杆的伸缩端与第二平板的上表面转动连接,两个第二螺柱并排设置,第二螺柱的轴线与第二平板的下表面垂直,第二螺柱的上部插装在第二平板上的通孔内,第二螺柱能沿所述通孔上下直线移动,第二螺母套装在第二螺柱的上端,且第二螺母位于第二平板的上表面,第二螺柱的下端与清洗刷悬臂固定连接,第二弹簧套装在第二螺柱上,且第二弹簧位于第二平板的下表面与清洗刷悬臂之间。
10、进一步的,所述重心调节机构包括丝杠、丝杠电机、丝杠螺母、配重组件、两个支架和两个导向光杆;两个支架沿主体的方向并排固定在主体内,丝杠的一端与一个支架转动连接,丝杠的另一端与另一个支架转动连接,丝杠电机固定安装在支架上,丝杠电机的电机轴与丝杠的端部同轴固定连接,两个导向光杆对称设置丝杠的两侧,导向光杆的两端分别与两个支架固定连接,所述配重组件的两端分别与两个导向光杆滑动连接,丝杠螺母固定安装在所述配重组件上,丝杠螺母套装在丝杠上。
11、进一步的,所述配重组件包括底板、两个配重螺柱、两个锁紧螺母、两个导向板和多个配重块;丝杠螺母固定在底板上表面的中部,两个配重螺柱对称设置在丝杠螺母的两侧,配重螺柱的下端与底板的上表面固定连接,且配重螺柱的轴线与底板的上表面垂直,多个配重块套装在配重螺柱上,锁紧螺母套装在配重螺柱上,且锁紧螺母位于配重块的上表面,两个导向板对称设置在底板的两端,且导向板与底板的端部固定连接,导向板套装在导向光杆上,且导向板能沿导向光杆往复直线移动。
12、本发明的有益效果是:
13、1、本发明替代了人工清除坝体表面污损附着物,不仅降低了人力物力的消耗,而且避免了工作人员在坝体表面作业产生的安全隐患;
14、2、本发明设有重心调节机构,由于坝体表面具有一定坡度,机器作业过程中容易发生翻车现象,在人工操控下,使配重块沿主体内前后移动,以此调节主体重心位置,提高主体运行的稳定性,避免发生翻车现象;
15、3、本发明的刮扫机构能够先行对坝体表面的强力污损附着物进行刮扫,随后清洗刷机构将残留的污损附着物清扫干净,这种刮扫和清洗刷配合的方式,使的本发明能够将坝体的污损附着物以及顽固污损附着物彻底清理干净;
16、4、本发明采用远程遥控的方式进行坝体表面污损附着物的清除,不仅减轻了工作人员的负担,也避免了工作人员在坝体表面发生危险。
技术特征:
1.一种坝体表面污损附着物清除机器人,其特征在于:所述一种坝体表面污损附着物清除机器人包括主体(1)、刮扫机构(2)、清洗刷机构(3)、重心调节机构、四个驱动电机(4)和四个防滑轮(5);主体(1)前部的两侧对称设有两个驱动电机(4),主体(1)后部的两侧对称设有两个驱动电机(4),每个驱动电机(4)的电机轴上均同轴固定套装一个防滑轮(5),刮扫机构(2)安装在主体(1)的前端,清洗刷机构(3)安装在主体(1)的后端,所述重心调节机构安装在主体(1)内。
2.根据权利要求1所述的一种坝体表面污损附着物清除机器人,其特征在于:刮扫机构(2)包括主轴(201)、副轴(202)、驱动组件、左侧框(203)、右侧框(204)、左支臂(205)、右支臂(206)、两个第一高度调节组件和多个活动刮扫组件;左支臂(205)和右支臂(206)并排平行设置在主体(1)的前端,左支臂(205)的后端通过一个所述第一高度调节组件与主体(1)的前端面连接,右支臂(206)的后端通过另一个第一高度调节组件与主体(1)的前端面连接,左侧框(203)和右侧框(204)并排设置在左支臂(205)与右支臂(206)之间,左侧框(203)外表面的中部通过副轴(202)与左支臂(205)前端的内测转动连接,右侧框(204)外表面的中部通过主轴(201)与右支臂(206)前端的内侧面转动连接,所述驱动驱动组件安装在右支臂(206)内,所述驱动组件与主轴(201)连接,多个所述活动刮扫组件沿圆周方向均布设置在左侧框(203)与右侧框(204)之间,所述活动刮扫组件的左端与左侧框(203)的内侧面连接,所述活动刮扫组件的右端与右侧框(204)的内侧面连接。
3.根据权利要求2所述的一种坝体表面污损附着物清除机器人,其特征在于:所述驱动组件包括刮扫驱动电机(207)、传动轴(208)、主齿轮(209)和从动齿轮(2010);驱动电机(207)固定安装在右支臂(206)内,传动轴(208)的后端与驱动电机(207)的电机轴同轴固定连接,主齿轮(209)同轴固定套装在传动轴(208)的前端,从动齿轮(2010)同轴固定套装在主轴(201)上,从动齿轮(2010)与主齿轮(209)啮合。
4.根据权利要求1或2所述的一种坝体表面污损附着物清除机器人,其特征在于:所述第一高度调节组件包括第一电动推杆(2011)和第一缓冲单元;第一电动推杆(2011)的固定端与主体(1)的前端面转动连接,第一电动推杆(2011)的伸缩端与所述第一缓冲单元转动连接,左支臂(205)的后端与主体(1)的前端面转动连接,右支臂(206)的后端与主体(1)的前端转动连接。
5.根据权利要求4所述的一种坝体表面污损附着物清除机器人,其特征在于:所述第一缓冲单元包括第一平板(2012)、两个第一螺柱(2013)、两个第一螺母(2014)和两个第一弹簧(2015);第一平板(2012)的上表面与第一电动推杆(2011)的伸缩端转动连接,两个第一螺柱(2013)并排设置,且第一螺柱(2013)的轴线与第一平板(2012)的下表面垂直,第一螺柱(2013)的上部插装在第一平板(2012)下表面的通孔内,且第一螺柱(2013)能沿所述通孔上下直线移动,第一螺母(2014)套装在第一螺柱(2013)上,且第一螺母(2014)位于第一平板(2012)的上表面,第一弹簧(2015)套装在第一螺柱(2013)上,且第一弹簧(2015)位于第一平板(2012)的下表面,第一螺柱(2013)的下端与左支臂(205)或右支臂(206)的上表面固定连接。
6.根据权利要求2所述的一种坝体表面污损附着物清除机器人,其特征在于:所述活动刮扫组件包括刮扫辊(2016)和刮扫轴(2017),刮扫轴(2017)的左端与左侧框(203)的内侧面固定连接,刮扫轴(2017)的右端与右侧框(204)的内侧面固定连接,刮扫辊(2016)套装在刮扫轴(2017)上,且刮扫辊(2016)能以刮扫轴(2017)为轴线转动。
7.根据权利要求1所述的一种坝体表面污损附着物清除机器人,其特征在于:清洗刷机构(3)包括第二高度调节组件、清洗刷悬臂(301)、清洗刷电机(302)、电机壳(303)和清洗刷(304);清洗刷悬臂(301)的前端与主体(1)的后端面转动连接,电机壳(303)固定安装在清洗刷悬臂(301)的后端,清洗刷电机(302)固定安装在电机壳(303)内,且清洗刷电机(302)的电机轴朝下,清洗刷(304)固定套装在清洗刷电机(302)的电机轴上,清洗刷悬臂(301)通过所述第二高度调节组件与主体(1)的后端连接。
8.根据权利要求7所述的一种坝体表面污损附着物清除机器人,其特征在于:所述第二高度调节组件包括第二电动推杆(305)、第二平板(306)、两个第二螺柱(307)、两个第二螺母(308)和两个第二弹簧(309);第二电动推杆(305)的固定端与主体(1)的后端面转动连接,第二电动推杆(305)的伸缩端与第二平板(306)的上表面转动连接,两个第二螺柱(307)并排设置,第二螺柱(307)的轴线与第二平板(306)的下表面垂直,第二螺柱(307)的上部插装在第二平板(306)上的通孔内,第二螺柱(307)能沿所述通孔上下直线移动,第二螺母(308)套装在第二螺柱(307)的上端,且第二螺母(308)位于第二平板(306)的上表面,第二螺柱(307)的下端与清洗刷悬臂(301)固定连接,第二弹簧(309)套装在第二螺柱(307)上,且第二弹簧(309)位于第二平板(306)的下表面与清洗刷悬臂(301)之间。
9.根据权利要求1所述的一种坝体表面污损附着物清除机器人,其特征在于:所述重心调节机构包括丝杠(6)、丝杠电机(7)、丝杠螺母(8)、配重组件、两个支架(9)和两个导向光杆(10);两个支架(9)沿主体(1)的方向并排固定在主体(1)内,丝杠(6)的一端与一个支架(9)转动连接,丝杠(6)的另一端与另一个支架(9)转动连接,丝杠电机(7)固定安装在支架(9)上,丝杠电机(9)的电机轴与丝杠(6)的端部同轴固定连接,两个导向光杆(10)对称设置丝杠(6)的两侧,导向光杆(10)的两端分别与两个支架(9)固定连接,所述配重组件的两端分别与两个导向光杆(10)滑动连接,丝杠螺母(8)固定安装在所述配重组件上,丝杠螺母(8)套装在丝杠(6)上。
10.根据权利要求9所述的一种坝体表面污损附着物清除机器人,其特征在于:所述配重组件包括底板(11)、两个配重螺柱(12)、两个锁紧螺母(13)、两个导向板(14)和多个配重块(15);丝杠螺母(8)固定在底板(11)上表面的中部,两个配重螺柱(12)对称设置在丝杠螺母(8)的两侧,配重螺柱(12)的下端与底板(11)的上表面固定连接,且配重螺柱(12)的轴线与底板(11)的上表面垂直,多个配重块(15)套装在配重螺柱(12)上,锁紧螺母(13)套装在配重螺柱(12)上,且锁紧螺母(13)位于配重块(15)的上表面,两个导向板(14)对称设置在底板(11)的两端,且导向板(14)与底板(11)的端部固定连接,导向板(14)套装在导向光杆(10)上,且导向板(14)能沿导向光杆(10)往复直线移动。
技术总结
一种坝体表面污损附着物清除机器人,它涉及一种污损附着物清除机器人。本发明为了解决坝体表面污损附着物的清除工作都是由水利工作人员进行人工清除,不仅增加人力物力的消耗,而且存在较大安全隐患的问题。本发明包括主体、刮扫机构、清洗刷机构、重心调节机构、四个驱动电机和四个防滑轮;主体前部的两侧对称设有两个驱动电机,主体后部的两侧对称设有两个驱动电机,每个驱动电机的电机轴上均同轴固定套装一个防滑轮,刮扫机构安装在主体的前端,清洗刷机构安装在主体的后端,所述重心调节机构安装在主体内。本发明属于水利工程技术领域。
技术研发人员:刘强,刘西军,占晓明,程武伟,薛阳,吕骥
受保护的技术使用者:浙江华东测绘与工程安全技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!