一种清洗装置的制作方法
本技术属于清洗设备,具体涉及一种清洗装置。
背景技术:
1、本部分的陈述仅仅是提供了与本实用新型相关的背景技术信息,不必然构成在先技术。
2、对于橡胶制品的模具成型面,随着硫化次数的增加,其表面不断附着胶垢、油污等污物,对产品质量产生各种不良影响。因此,需要及时清洗模具表面、去除污物,以确保持续生产的产品质量。目前已知的模具表面清洗方法有介质喷射清洗、超声波清洗等。
3、介质喷射清洗包括喷砂和喷射干冰清洗等,喷砂清洗容易损伤模具表面,降低其使用寿命,而喷射干冰清洗则会产生较大的环境噪音、且要求模具处于高温状态时才可达到最优清洗效果。超声波清洗仅适用于表面油污的清洗,无法去除紧密附着的胶垢、铁锈等。
4、同时,模具成型面属于自由曲面,形状种类繁多,大多清洗设备只能对单一形状模具进行清洗,或者购买多套设备,设备单独或同时使用,成本高且效率较低。同时,对于轮胎模具领域,轮胎模具需要清洗的部件包括花纹块和侧板,现有技术中的清洗设备无法满足这两类部件的同时在线清洗。
技术实现思路
1、本实用新型为了解决上述技术问题或者至少部分地解决上述技术问题,提出了一种清洗装置,本实用新型提供了至少两种类型的模具的清洗单元,且清洗机器人能够在不同的清洗单元之间行走、配合,不同清洗单元可以协同清洗,减少了机器人等位时间,降低了投入成本,提高了工作效率。
2、根据一些实施例,本实用新型采用如下技术方案:
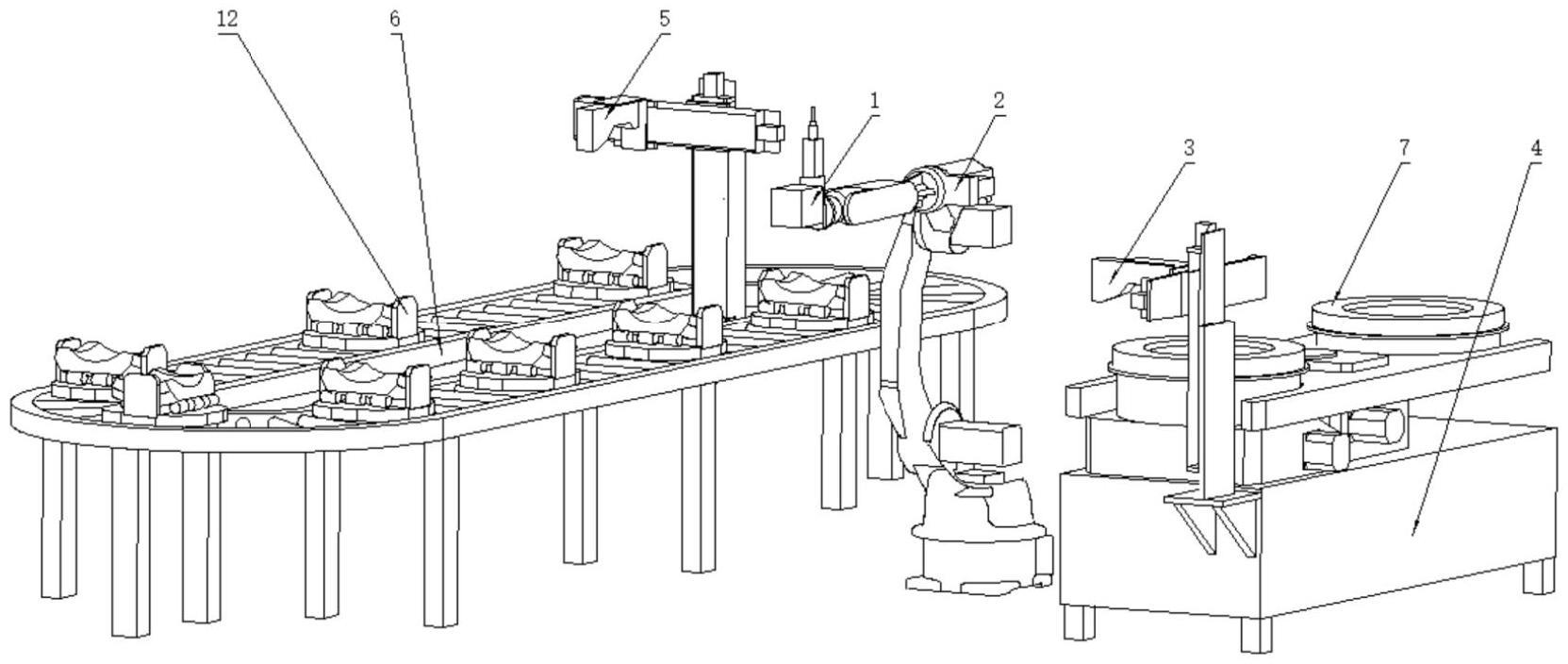
3、一种清洗装置,包括块清洗单元、片清洗单元及清洗机器人,其中:
4、所述块清洗单元、片清洗单元并排设置,所述清洗机器人设置于两个清洗单元之间;
5、所述块清洗单元包括输送线,所述输送线上设置有多个用于定位块形模具的夹紧工装,输送线上设置有第一传感器;
6、所述片清洗单元包括两个并排设置的、用于定位片形模具的模具工位,所述片清洗单元上设置有第二传感器;
7、所述清洗机器人包括行走机构和机械臂,所述机械臂上设置有清洗头,所述机械臂可带动所述清洗头进行多轴运动。
8、作为可选择的实施方式,所述输送线为环形,所述输送线连接有第三驱动机构,驱动各夹紧工装沿着所述环形运动,以到达清洗机器人在输送线的可作业区域。
9、作为可选择的实施方式,所述输送线上设置有调节机构,所述调节机构上设置第一传感器,通过调节机构,使第一传感器具有水平和竖直方向上移动的自由度。
10、所述调节机构为可移动模组。
11、作为可选择的实施方式,所述片清洗单元设置有作业平台,所述作业平台上设置有交换手臂,两个模具工位并排设置于交换手臂上,所述交换手臂连接有用于驱动所述交换手臂沿中心水平旋转的第一驱动机构。
12、作为可选择的实施方式,至少一模具工位设置有用于驱动所述模具工位沿其轴心水平旋转的第二驱动机构。
13、作为进一步限定的实施方式,所述交换手臂上设置有水平两个方向上移动的移动机构,所述移动机构上设置第二传感器。
14、作为可选择的实施方式,所述清洗头为激光清洗头、干冰清洗头、喷砂清洗头中一种。
15、作为可选择的实施方式,所述清洗机器人被配置为在块清洗单元的输送线旋转,更换下一夹紧工装时,移动至片清洗单元一侧进行片形模具的清洗。
16、作为可选择的实施方式,所述清洗机器人被配置为在片清洗单元旋转更换待清洗的模具工位时,移动至块清洗单元一侧进行块形模具的清洗。
17、与现有技术相比,本实用新型的有益效果为:
18、本实用新型具备自动扫描、检测待清洗特征的功能,可在无待清洗工件数字模型的状态下,完成各类模具不同特征表面的清洗工作,具有高度自动化。
19、为使本实用新型的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种清洗装置,其特征是,包括块清洗单元、片清洗单元及清洗机器人,其中:
2.如权利要求1所述的一种清洗装置,其特征是,所述输送线为环形,所述输送线连接有第三驱动机构,驱动各夹紧工装沿着所述环形运动,以到达清洗机器人在输送线的可作业区域。
3.如权利要求1或2所述的一种清洗装置,其特征是,所述输送线上设置有调节机构,所述调节机构上设置第一传感器,通过调节机构,使第一传感器具有水平和竖直方向上移动的自由度。
4.如权利要求1所述的一种清洗装置,其特征是,所述片清洗单元设置有作业平台,所述作业平台上设置有交换手臂,两个模具工位并排设置于交换手臂上,所述交换手臂连接有用于驱动所述交换手臂沿中心水平旋转的第一驱动机构。
5.如权利要求1或4所述的一种清洗装置,其特征是,至少一模具工位设置有用于驱动所述模具工位沿其轴心水平旋转的第二驱动机构。
6.如权利要求4所述的一种清洗装置,其特征是,所述交换手臂上设置有水平两个方向上移动的移动机构,所述移动机构上设置第二传感器。
7.如权利要求1所述的一种清洗装置,其特征是,所述清洗头为激光清洗头、干冰清洗头、喷砂清洗头中一种。
技术总结
本技术提供了一种清洗装置,包括块清洗单元、片清洗单元及清洗机器人,块清洗单元、片清洗单元并排设置,所述清洗机器人设置于两个清洗单元之间;块清洗单元包括输送线,所述输送线上设置有多个用于定位块形模具的夹紧工装,输送线上设置有第一传感器;片清洗单元包括两个并排设置的、用于定位片形模具的模具工位,所述片清洗单元上设置有第二传感器;清洗机器人包括行走机构和机械臂,机械臂上设置有清洗头,机械臂可带动清洗头进行多轴运动。本技术提供了至少两种类型的模具的清洗单元,且清洗机器人能够在不同的清洗单元之间行走、配合,不同清洗单元可以协同清洗,减少了机器人等位时间,降低了投入成本,提高了工作效率。
技术研发人员:刘群,滕松瑶,张少坤,宋盼盼,李处来
受保护的技术使用者:山东豪迈数控机床有限公司
技术研发日:20221111
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!