MBBR脉冲式曝气控制方法和系统与流程
本发明涉及污水处理技术,尤其涉及了mbbr脉冲式曝气控制方法和系统。
背景技术:
1、生化处理是大多数传统污水处理工艺的核心,我国大多数市政污水处理场都采用生化处理技术处理城市居民的生活污水。
2、近年来,随着排放标准的提升,污水处理过程中能源和碳源的消耗量也增加了。当前我国污水处理厂在污水处理过程中消耗的能源较大,特别是在曝气等生化处理阶段存在着较大的能耗。由于污水处理厂存在着能源消耗大及运行成本高的问题,这对城市污水处理厂的建设和发展起到了较大的阻碍作用。
3、移动床生物膜反应器:是一种高效的污水处理技术,它利用生物膜的过滤作用来净化废水。
4、mbbr系统由两个主要部分组成:生物膜和反应器。生物膜是由膜元件和膜支撑层组成的,膜元件由微纤维滤膜或膜孔组成,膜支撑层是由织物或其他材料制成的,膜元件和膜支撑层之间形成了一个微小的空隙,称为膜隙。膜隙内的水流动,在膜隙内的污物被分离出来。而悬浮填料是一种活性生物载体,其表面便于各种微生物附着从而形成生物膜。
技术实现思路
1、本发明针对现有技术中悬浮填料容易在池面形成大面积堆积,然后覆盖池面导致好氧池的溶解氧浓度降低,有机物和氨氮转化效率低的问题,提供了mbbr脉冲式曝气控制方法和系统。
2、为了解决上述技术问题,本发明通过下述技术方案得以解决:
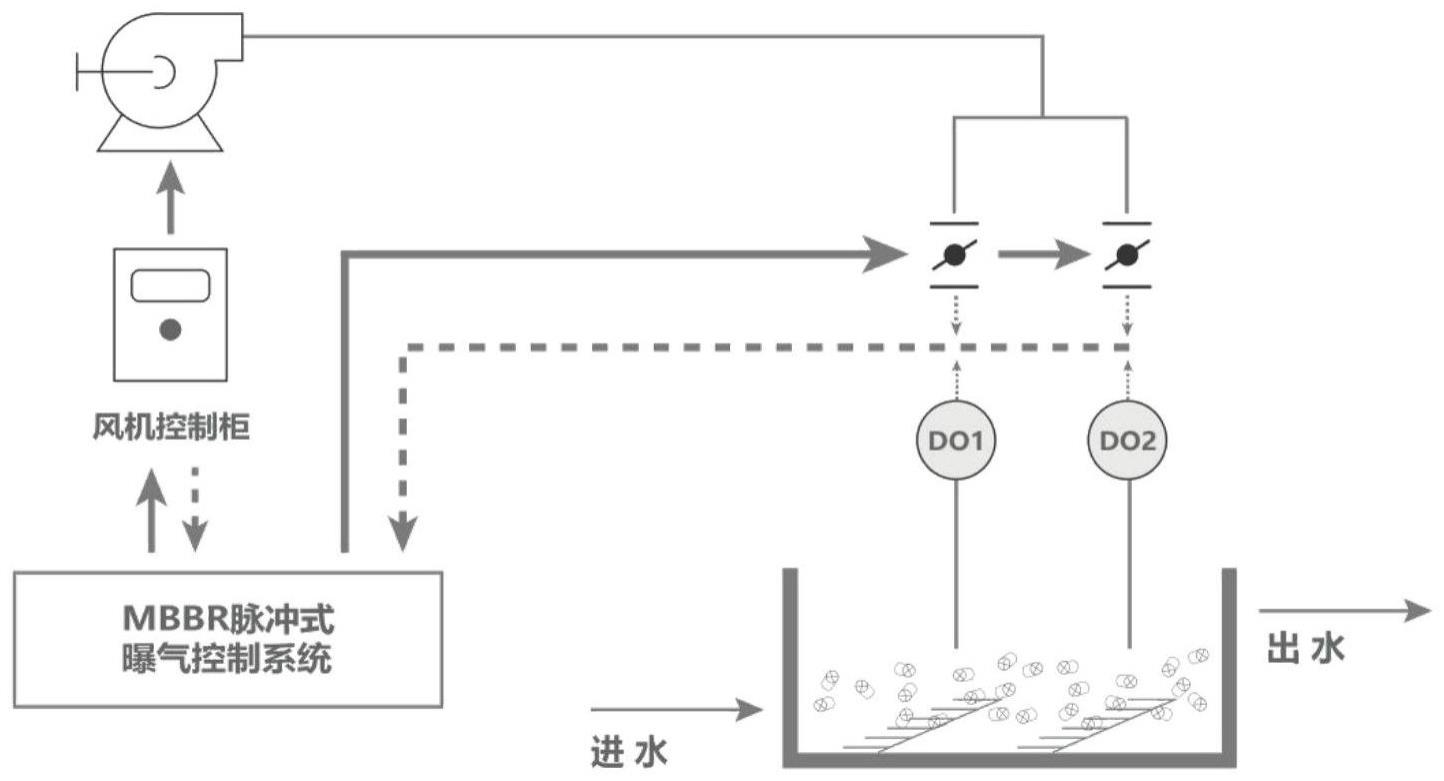
3、mbbr脉冲式曝气控制方法,包括多个mbbr池,风机控制系统和脉冲式曝气系统,其方法包括:
4、mbbr池数据库的构建,对mbbr池内的参数进行数据库的构建;mbbr池内的参数包括风机控制系统的状态点位数据,脉冲式曝气系统mbbr池控制状态点位数据及溶解氧浓度点位数据,风机控制系统风机运行状态点位数据、mbbr池曝气单元阀门的状态点位数据;
5、mbbr池控制方式的切换,对mbbr池的控制方式通过人工控制切换为非人工控制;
6、曝气执行单元的切换,对于mbbr池在非人工控制的方式下进行曝气执行单元的切换;
7、风机控制系统风机导叶的调整,通过溶解氧浓度点位数据的平均值确定风机控制系统风机导叶动作;
8、
9、其中,n为算法控制池的个数,[domin,domax]为mbbr池do的需求控制范围,do的需求控制范围为5-10mg/l,则domin为5mg/l,domax为10mg/l,kp表示比例系数;
10、风机控制系统风机导叶的决策动作的确定,通过风机控制系统风机导叶的风压确定风机控制系统风机导叶的决策动作;
11、mbbr池曝气单元阀门动作调整及风机控制系统风机动作调整,通过对mbbr池曝气单元阀门动作调整及风机控制系统风机动作调整从而进行脉冲式曝气控制。
12、作为优选,对于曝气执行单元的切换完成后,还包括曝气执行单元切换时间的确定,通过随机审查取值区间在[a,b]内服从均匀分布的一个时间t,t秒之后执行下一次切换动作,t服从的概率分布为:
13、
14、作为优选,曝气执行单元的切换包括:从mbbr池数据库读取当前时间点mbbr池控制标志位数组p,遍历mbbr池控制标志位数组p,假设遍历到mbbr池编号为i,且该mbbr池处于算法控制状态,则将循环矩阵的第i行第0列对应的曝气单元打开,将第i行最后一列对应的曝气单元关闭,遍历结束之后,并将循环矩阵c乘以循环位移矩阵。
15、作为优选,mbbr池控制方式的切换,从mbbr池数据库读取当前时间点t和上一个时间点t-1,mbbr池控制标志位数组p,然后遍历mbbr池控制标志位数组p,对t和t-1两个时刻的mbbr池控制标志位数组p,如果mbbr池控制标志位数组p元素值由false变为true,则表示mbbr池控制标志位数组p元素对应的mbbr池由非人工控制状态转为人工控制状态,则先关闭所有曝气单元,然后把常开曝气单元打开。
16、作为优选,风机控制系统风机导叶的决策动作的确定,当风压高于pmax时,将所有导叶的开度下调,则
17、
18、式中,p表示当前风机风压。
19、作为优选,风机控制系统风机动作调整通过程序配置进行约束。
20、为了解决上述技术问题,本申请还提供了mbbr脉冲式曝气控制系统,包括多个mbbr池,风机控制系统和脉冲式曝气系统,其特征在于,通过mbbr脉冲式曝气控制方法实现的系统,还包括:
21、mbbr池数据库的构建模块,对mbbr池内的参数进行数据库的构建;mbbr池内的参数包括风机控制系统的状态点位数据,脉冲式曝气系统曝气单元的控制状态点位数据及溶解氧浓度点位数据,风机控制系统风机运行状态点位数据、mbbr池曝气单元阀门的状态点位数据;
22、mbbr池控制方式的切换模块,对mbbr池的控制方式通过人工控制切换为非人工控制;
23、曝气执行单元的切换模块,对于mbbr池在非人工控制的方式下进行曝气执行单元的切换;
24、风机控制系统风机导叶的调整模块,通过溶解氧浓度点位数据的平均值确定风机控制系统风机导叶动作;
25、风机控制系统风机导叶的决策动作的确定模块,通过风机控制系统风机导叶的风压确定风机控制系统风机导叶的决策动作;
26、mbbr池曝气单元阀门动作调整及风机控制系统风机动作调整模块,通过对mbbr池曝气单元阀门动作调整及风机控制系统风机动作调整从而进行脉冲式曝气控制。
27、为了解决上述技术问题,本申请还提供了一种计算机可读存储介质,其所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如mbbr脉冲式曝气控制方法的步骤。
28、为了解决上述技术问题,本申请还提供了一种电子设备,其特征在于,包括:存储器,用于存储计算机程序;处理器,用于执行所述计算机程序时实现mbbr脉冲式曝气控制方法的步骤。
29、本发明由于采用了以上技术方案,具有显著的技术效果:
30、本发明为mbbr池的曝气工艺段控制算法,通过对好氧池池底等间隔分布的曝气单元的开关进行特定的逻辑控制,使mbbr填料产生较好的流动性,不仅能有效减少mbbr填料在池面以及出水口堆积,解决了因为池面被覆盖导致的好氧池溶解氧浓度降低的问题,而且使得活性污泥均匀分布在整个池体当中,更好的利用好氧池容积,使得有机物降解和氨氮转化效率更高;
31、本发明有效利用了污水的流动方向,以脉冲式助推增加填料的动能,使得填料在出水口附近发生更激烈的碰撞,从而冲散堆积的填料。
32、本发明除常开曝气单元以外的曝气单元执行时间长度具有随机性,使得填料更难进入堆积稳态。
33、本发明将距离出水口最近的曝气单元设置为常开模式,有效缓解出水口堆积问题。
技术特征:
1.mbbr脉冲式曝气控制方法,包括多个mbbr池,风机控制系统和脉冲式曝气系统,其方法包括:
2.根据权利要求1所述的mbbr脉冲式曝气控制方法,其特征在于,对于曝气执行单元的切换完成后,还包括曝气执行单元切换时间的确定,通过随机生成取值区间在[a,b]内服从均匀分布的一个时间t,t秒之后执行下一次切换动作,t服从的概率分布为:
3.根据权利要求1所述的mbbr脉冲式曝气控制方法,其特征在于,曝气执行单元的切换包括:从mbbr池数据库读取当前时间点mbbr池控制标志位数组p,遍历mbbr池控制标志位数组p,假设遍历到mbbr池编号为i,且该mbbr池处于算法控制状态,则将循环矩阵的第i行第0列对应的曝气单元打开,将第i行最后一列对应的曝气单元关闭,遍历结束之后,并将循环矩阵c乘以循环位移矩阵。
4.根据权利要求1所述的mbbr脉冲式曝气控制方法,其特征在于,mbbr池控制方式的切换,从mbbr池数据库读取当前时间点t和上一个时间点t-1的mbbr池控制标志位数组p,然后遍历mbbr池控制标志位数组p,对t和t-1两个时刻的mbbr池控制标志位数组p进行比较,如果mbbr池控制标志位数组p元素值由false变为true,则表示mbbr池控制标志位数组p元素对应的mbbr池由非人工控制状态转为人工控制状态,则先关闭所有曝气单元,然后把常开曝气单元打开。
5.根据权利要求1所述的mbbr脉冲式曝气控制方法,其特征在于,风机控制系统风机导叶的决策动作的确定,当风压高于pmax时,将所有导叶的开度下调,则
6.根据权利要求1所述的mbbr脉冲式曝气控制方法,其特征在于,风机控制系统风机动作调整通过程序配置进行约束。
7.mbbr脉冲式曝气控制系统,包括多个mbbr池,风机控制系统和脉冲式曝气系统,其特征在于,通过权利要求1-6任一所述的mbbr脉冲式曝气控制方法实现的系统,还包括:
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的mbbr脉冲式曝气控制方法的步骤。
9.一种电子设备,其特征在于,包括:存储器,用于存储计算机程序;处理器,用于执行所述计算机程序时实现如权利要求1至6任一项所述的mbbr脉冲式曝气控制方法的步骤。
技术总结
本发明涉及污水处理技术,公开了MBBR脉冲式曝气控制方法和系统,其方法包括,对于MBBR池在非人工控制的方式下进行曝气执行单元的切换;通过溶解氧浓度点位数据的平均值确定风机控制系统风机导叶动作;风机控制系统风机导叶的决策动作的确定,通过风机控制系统风机导叶的风压确定风机控制系统风机导叶的决策动作;MBBR池曝气单元阀门动作调整及风机控制系统风机动作调整,通过对MBBR池曝气单元阀门动作调整及风机控制系统风机动作调整从而进行脉冲式曝气控制。本发明有效利用了污水的流动方向,以脉冲式助推增加填料的动能,使得填料在出水口附近发生更激烈的碰撞,从而冲散堆积的填料,还通过曝气单元切换时间的随机性来使得填料更难以进入稳定状态。
技术研发人员:王娇,顾象天,傅衡成,邹德扬,郭慧
受保护的技术使用者:浙江数翰科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!