一种用于激光清洗的高速旋转反射镜同步控制系统及方法
本发明涉及一种激光清洗系统及方法,具体涉及一种用于激光清洗的高速旋转反射镜同步控制系统及方法。
背景技术:
1、激光清洗需要实现大功率激光光束的摆扫来实现大面积清洗,可以用于船体、机体、车体等表面的除漆工作。传统系统采用摆镜来实现光束的摆扫,利用摆镜来实现光束摆扫,由于摆镜采用往复运动,摆扫过程中需要加减速,导致扫描过程不是匀速运行,从而导致工作面能量不均匀。传统摆镜在工作过程中存在周期性的加减速工作,导致电机功率大。扫描速度范围较小,无法覆盖不同功率和清洗面的使用要求。
技术实现思路
1、本发明的目的是解决现有激光清洗采用摆镜的方法,存在激光清洗过程非匀速运行导致激光作用于清洗工作面的能量不均匀使清洗质量下降、摆镜周期性的加减速工作使电机功率大导致可靠性差,以及扫描速度可调范围小导致使用受限的技术问题,而提供一种用于激光清洗的高速旋转反射镜同步控制系统及方法。
2、本发明的技术解决方案是:
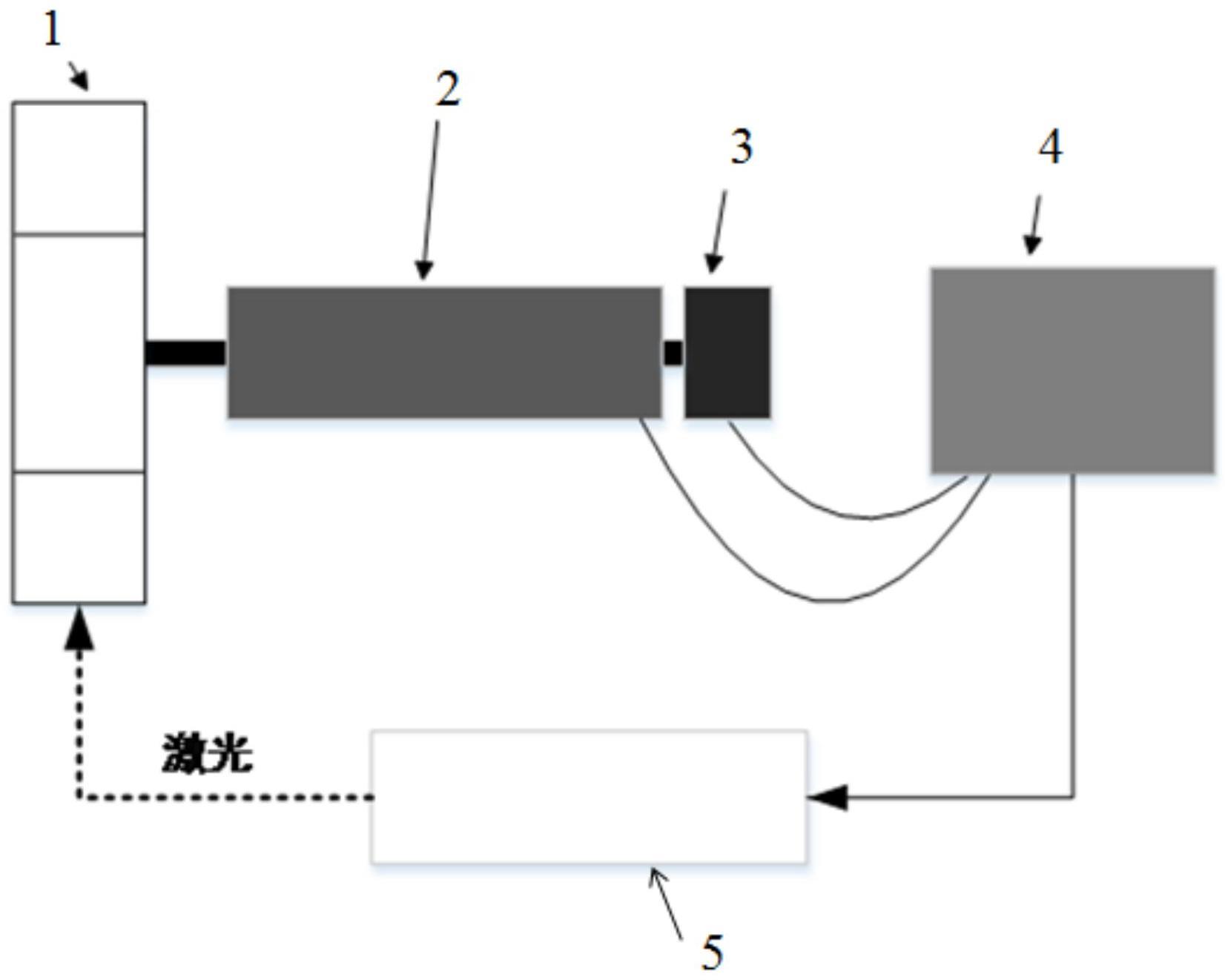
3、一种用于激光清洗的高速旋转反射镜同步控制系统,其特殊之处在于:包括旋转反射镜、电机、光电编码器、控制装置和激光器;
4、所述电机为双输出端电机;
5、所述旋转反射镜为正多棱柱旋转反射镜,其设置在电机的一个输出端上,电机可用于带动旋转反射镜旋转;
6、所述激光器设置于旋转反射镜的一侧,其所产生并出射的激光光束能够入射至所述旋转反射镜的其中一个反射面上,并能够经该其中一个反射面反射至清洗工作面;
7、定义:旋转反射镜的所述其中一个反射面所处位置为反射面工作位置,则在正多棱柱旋转反射镜旋转时,相邻反射面之间的棱柱线所处位置既为前一反射面离开反射面工作位置时的尾端位置,同时又是后一反射面进入反射面工作位置时的初始位置;
8、所述光电编码器设置在电机的另一个输出端上,光电编码器用于测量判断旋转反射镜的实时位置;
9、所述控制装置分别与电机、光电编码器和激光器电连接,用于控制电机转速,同时根据光电编码器测量判断得到的旋转反射镜位置,控制激光器的开关,使激光光束入射到旋转反射镜中位于反射面工作位置的反射面上,并反射至清洗工作面进行清洗操作。
10、进一步地,所述电机的转速调整范围为500rpm~5000rpm。
11、进一步地,所述旋转反射镜为正八棱柱旋转反射镜。
12、进一步地,所述电机为高速无刷电机。
13、同时,本发明还提供了一种用于激光清洗的高速旋转反射镜同步控制方法,采用上述的一种用于激光清洗的高速旋转反射镜同步控制系统,其特殊之处在于,包括以下步骤:
14、1)采用控制装置按照清洗需要设置电机的转速、激光器的工作参数,使激光器产生的激光光束入射至旋转反射镜位于反射面工作位置的其中一个反射面上,并反射至清洗工作面;
15、2)打开电机,通过电机带动旋转反射镜旋转,使旋转反射镜上位于反射面工作位置的某一个反射面反射的激光光束入射至清洗工作面进行清洗操作;
16、3)待清洗工作面达到预设清洗要求后,关闭电机、光电编码器及激光器,完成激光清洗工作。
17、进一步地,步骤1)中,所述旋转反射镜采用正八棱柱旋转反射镜;
18、将正八棱柱旋转反射镜的反射面工作位置设置为0°-45°位置,其中0°所在位置为正八棱柱旋转反射镜旋转时,某一反射面刚进入反射面工作位置时的初始位置,45°所在位置为正八棱柱旋转反射镜旋转时,某一反射面离开反射面工作位置时的尾端位置;正八棱柱旋转反射镜中相邻反射面之间的棱柱线所处位置既为前一反射面离开反射面工作位置时的45°尾端位置,同时又是后一反射面进入反射面工作位置时的0°初始位置。
19、进一步地,步骤2)具体为:
20、打开电机,通过电机带动旋转反射镜旋转,使旋转反射镜上位于反射面工作位置的某一个反射面反射的激光光束入射至清洗工作面,同时采用控制装置控制激光器的开关状态,进行清洗操作;
21、所述采用控制装置控制激光器的开关状态具体为:当光电编码器返回的信号显示激光光束入射在正八棱柱旋转反射镜的前一反射面的42°-45°位置,以及在后一反射面的0°-3°位置区域,则关闭激光器,停止输出激光;当光电编码器返回的信号显示激光光束入射在正八棱柱旋转反射镜的同一反射面的3°-42°位置区域,则打开激光器,持续输出激光。
22、进一步地,所述采用控制装置控制激光器的开关状态具体为:
23、控制装置当光电编码器返回的信号显示激光光束入射在正八棱柱旋转反射镜的前一反射面的42.5°-45°位置,以及在后一反射面的0°-2.5°位置区域,则停止输出激光,当光电编码器返回的信号显示激光光束入射在正八棱柱旋转反射镜的同一反射面的2.5°-42.5°位置区域则持续输出激光。
24、本发明的有益效果:
25、1、本发明一种用于激光清洗的高速旋转反射镜同步控制系统,采用旋转反射镜来实现激光光束的扫描反射,扫描过程速度一致性好,可一直保持匀速旋转,能量可均匀作用在清洗工作面上,从而使激光光束匀速的扫过清洗工作面,保证清洗的稳定和可靠性,提升清洗质量。
26、2、本发明一种用于激光清洗的高速旋转反射镜同步控制系统,旋转反射镜工作时一直保持匀速工作即可完成激光光束在清洗工作面的扫描,相较于摆镜方法中长时间加减速运动,具有电机工作电流小,可靠性高,整体系统功耗小的优点。
27、3、本发明一种用于激光清洗的高速旋转反射镜同步控制系统,旋转反射镜的扫描速度大范围可调,其转速调整范围为500rpm~5000rpm,由于系统工作时只需要保持匀速旋转,因此针对不同功率和清洗面要求,可以方便的实现旋转反射镜的速度调节。
28、4、本发明一种用于激光清洗的高速旋转反射镜同步控制方法,具有简单、高效,清洗质量稳定可靠的优点。
29、5、本发明一种用于激光清洗的高速旋转反射镜同步控制方法,使用本发明系统可以控制在两个反射面交界的区域关断激光输出,避免激光在反射面交界处产生不规则反射,造成激光能量浪费以及设备不正常发热。
技术特征:
1.一种用于激光清洗的高速旋转反射镜同步控制系统,其特征在于:包括旋转反射镜(1)、电机(2)、光电编码器(3)、控制装置(4)和激光器(5);
2.根据权利要求1所述的一种用于激光清洗的高速旋转反射镜同步控制系统,其特征在于:
3.根据权利要求2所述的一种用于激光清洗的高速旋转反射镜同步控制系统,其特征在于:
4.根据权利要求3所述的一种用于激光清洗的高速旋转反射镜同步控制系统,其特征在于:
5.一种用于激光清洗的高速旋转反射镜同步控制方法,采用权利要求1-4任一所述的一种用于激光清洗的高速旋转反射镜同步控制系统,其特征在于,包括以下步骤:
6.根据权利要求5所述的一种用于激光清洗的高速旋转反射镜同步控制方法,其特征在于:
7.根据权利要求6所述的一种用于激光清洗的高速旋转反射镜同步控制方法,其特征在于,步骤2)具体为:
8.根据权利要求7所述的一种用于激光清洗的高速旋转反射镜同步控制方法,其特征在于:
技术总结
本发明涉及一种激光清洗系统及方法,具体涉及一种用于激光清洗的高速旋转反射镜同步控制系统及方法。解决了采用摆镜进行激光清洗,存在清洗工作面能量不均匀使清洗质量下降、电机可靠性差以及扫描速度可调范围小导致使用受限的技术问题。本发明系统包括旋转反射镜、带双输出端的电机、光电编码器、控制装置和激光器;旋转反射镜和光电编码器分别设置在电机的两个输出端上,电机用于带动旋转反射镜旋转;光电编码器用于判断旋转反射镜的实时位置;控制装置用于控制电机转速,同时根据光电编码器测量判断得到的旋转反射镜位置,控制激光器的开关,使激光光束入射到旋转反射镜中位于反射面工作位置的反射面上,并反射至清洗工作面进行清洗操作。
技术研发人员:王海涛,吕涛,姜凯,曹钰
受保护的技术使用者:中国科学院西安光学精密机械研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!