一种基于物联网的市政管道垃圾清理机器人的制作方法
本发明涉及垃圾清理机器人领域,特别涉及一种基于物联网的市政管道垃圾清理机器人。
背景技术:
1、市政管道包括:给水管道、排水管道、燃气管道、热力管道、电力电缆管道,市政管道的应用十分广泛,尤其涉及到给水管道和排水管道,管道长期使用,内部残留大量的青苔和一些泥沙垃圾,如果长期不清理,会造成管道的排水或给水性能变差,容易造成堵塞的现象,而给水管道对人类的影响较大,给水管道主要为城市输送供应生活用水、生产用水、消防用水和市政绿化及喷洒用水,如果给水管道内部残留大量杂质和青苔,长期会影响使用者的身体健康安全,因此需要对这些管道的内部垃圾进行清理,从而保障管道干净,但是现有的清理方式比较单一,很多采用化学药剂以及清理设备进行清理,清理效果差,管道内部还是残留很多垃圾残留物,对于较长管道不能实现彻底清理,市场上也有清理机器人,但是现有的机器人都是针对特有直径管道进行清理,不能对不同直径的管道进行快速清理,不能对管壁上的青苔和杂质进行快速铲除与清扫,不能对清理的杂质和垃圾输送到管道外,不能通过物联网进行操控,功能单一,灵活性差,不便人们使用,为此提供一种基于物联网的市政管道垃圾清理机器人。
技术实现思路
1、针对上述问题,本发明提供了一种基于物联网的市政管道垃圾清理机器人,来解决背景技术上的问题。
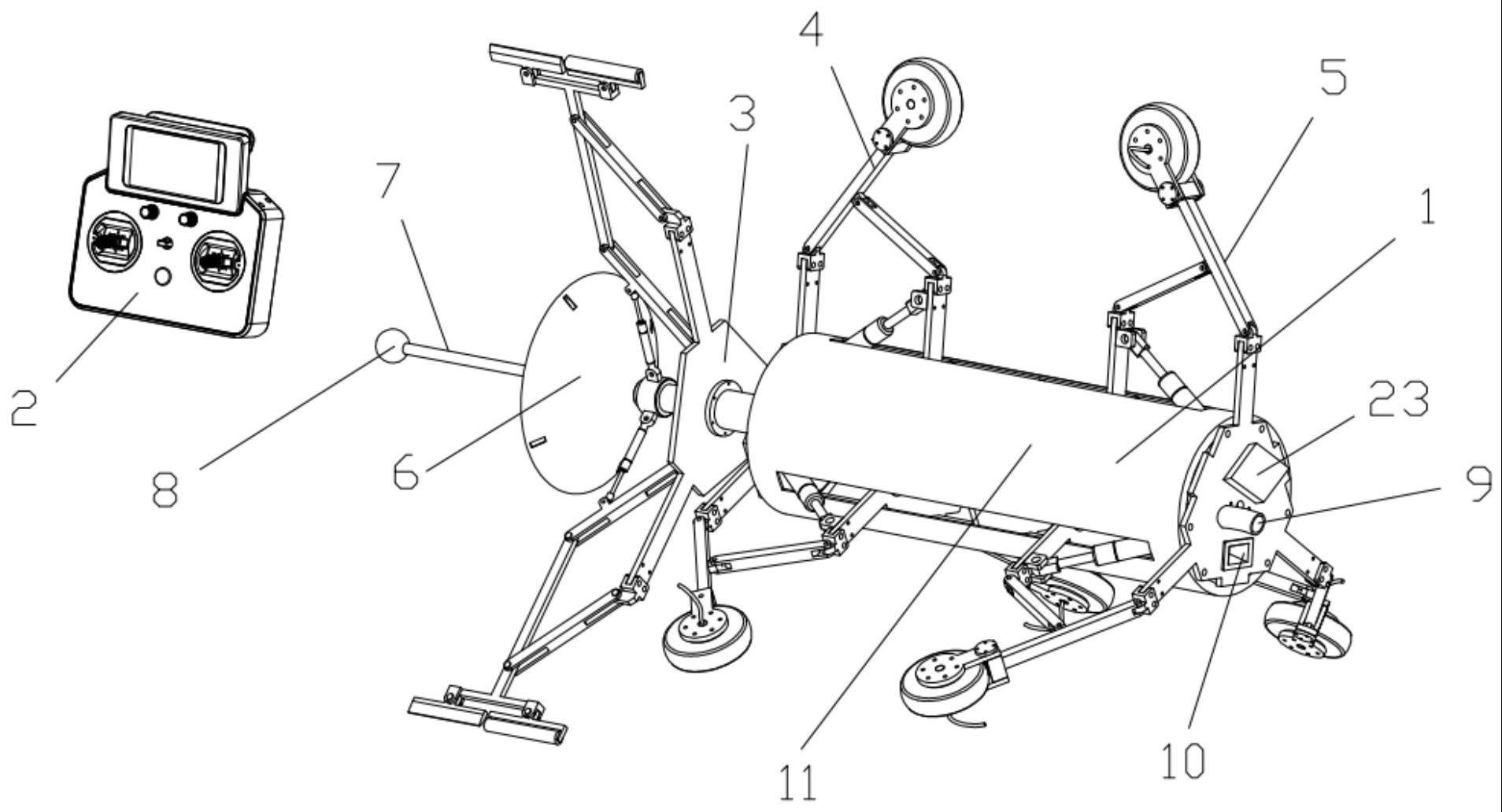
2、本发明所使用的技术方案是:一种基于物联网的市政管道垃圾清理机器人,包括机器人本体和无线遥控器,所述机器人本体包括外壳和内架,所述内架的一端连接有第一端板,所述第一端板上安装有第一驱动轮调节机构,所述内架的另一端连接有第二端板,所述第二端板上安装有第二驱动轮调节机构,所述内架的内部安装有第四驱动电机安装板,所述第四驱动电机安装板的中部两侧均安装有第四驱动电机,所述第四驱动电机上连接有丝杆,所述第一端板的一侧安装有第一驱动电机,所述第二端板的内侧上安装有蓄电池,所述第二端板的外侧上安装有电源连接插座和控制盒,所述第一端板的一侧连接有垃圾清理机构,所述垃圾清理机构的中部安装有进料管,所述进料管的一端焊接有垃圾收集斗,所述垃圾收集斗的一侧焊接有连接杆固定架,所述连接杆固定架的一侧中部焊接有连接杆,所述连接杆的一端安装有微型摄像头,所述连接杆固定架的另一侧中部安装有第二驱动电机,所述第二驱动电机上连接有绞龙。
3、作为本发明的一种优选技术方案,所述无线遥控器上安装有显示器和操控手柄。
4、作为本发明的一种优选技术方案,所述第一驱动轮调节机构和第二驱动轮调节机构均由活动板、第一臂杆活动连接头、第二连接头、第二电动伸缩杆、第三臂杆、驱动轮安装架、驱动轮、驱动电机、第四臂杆和丝杆螺纹套构成。
5、作为本发明的一种优选技术方案,所述第三臂杆通过第一臂杆活动连接头分别与第一端板和第二端板相连,所述第一端板和第二端板上通过第二连接头与第二电动伸缩杆相连,所述第二电动伸缩杆的一端通过第二连接头与活动板相连,活动板通过第一臂杆活动连接头与第四臂杆相连,所述第四臂杆与第三臂杆的中部通过连接头相连。
6、作为本发明的一种优选技术方案,所述第三臂杆的一端安装有驱动轮安装架,所述驱动轮安装架上安装有第三驱动电机,所述第三驱动电机上安装有驱动轮,所述驱动轮上设有防滑钉。
7、作为本发明的一种优选技术方案,所述活动板的中部安装有丝杆螺纹套,所述丝杆螺纹套与丝杆通过螺纹相连。
8、作为本发明的一种优选技术方案,所述垃圾清理机构由伸缩臂安装板、第一臂杆、第二臂杆、刮刀固定架、毛刷、刮刀、第二臂杆活动连接头、第一电动伸缩杆、第一轴承、套筒、齿轮盘、第二轴承和进料管构成。
9、作为本发明的一种优选技术方案,所述伸缩臂安装板的中部焊接有套筒,所述套筒的一端连接有第一轴承,所述套筒的另一端连接有第二轴承,所述第一轴承和第二轴承均焊接在进料管上,所述进料管焊接在内架上,所述进料管的一端连接有垃圾输送管,所述套筒上焊接有齿轮盘,所述齿轮盘上的齿轮与第一驱动电机转轴上的齿轮啮合。
10、作为本发明的一种优选技术方案,所述伸缩臂安装板上通过第二臂杆活动连接头分别安装有第一臂杆和第二臂杆,所述第一臂杆的一端安装有刮刀固定架,所述刮刀固定架上安装有毛刷和刮刀,所述第一臂杆上还通过第二臂杆活动连接头与第一电动伸缩杆相连,所述第一电动伸缩杆通过第二臂杆活动连接头安装在第一轴承上。
11、作为本发明的一种优选技术方案,所述蓄电池与控制盒电性连接,所述控制盒分别与微型摄像头、第一驱动电机、第四驱动电机、第二驱动电机、第一电动伸缩杆、第二电动伸缩杆和第三驱动电机电性连接,所述控制盒通过无线网络与无线遥控器相连,所述微型摄像头通过无线网络与无线遥控器上的显示器相连,所述微型摄像头采用夜视摄像头。
12、作为本发明的一种优选技术方案,所述外壳上设有与活动板相匹配的滑槽,所述电源连接插座上连接有电源线。
13、综上,与现有技术相比,本发明的有益效果是:该机器人可以在不同直径的市政管道内行走;具有管道内部拍摄回传功能可以直观的看到管道内部的情况,该机器人连接有电源线,实时给机器人供电,机器人内部也有蓄电池,防止外接电源断电无法进行控制,该机器人防滑性能好,不会在管道内出现打滑空转的现象;该机器人采用可以展开的机械臂以及防滑的驱动轮,让机器人在市政管道内能进行稳定的行走,该机器人在行走的时候能对管道内壁的垃圾和青苔进行清理,机器人身上安装有软管,机器人将管道内壁的垃圾进行清理后,利用传送机构将垃圾通过软管输送出去,垃圾不会堆积在机器人的前方,造成堵塞的现象,该机器人身上的铲刀在工作的时候能旋转,能对管壁的任何位置进行清理,还搭配了毛刷,对铲过后的内部进行扫刷,达到再次清理的目的,整体灵活性强,适应性能强。
技术特征:
1.一种基于物联网的市政管道垃圾清理机器人,包括机器人本体(1)和无线遥控器(2),其特征在于:所述机器人本体(1)包括外壳(11)和内架(12),所述内架(12)的一端连接有第一端板(20),所述第一端板(20)上安装有第一驱动轮调节机构(4),所述内架(12)的另一端连接有第二端板(21),所述第二端板(21)上安装有第二驱动轮调节机构(5),所述内架(12)的内部安装有第四驱动电机安装板(13),所述第四驱动电机安装板(13)的中部两侧均安装有第四驱动电机(15),所述第四驱动电机(15)上连接有丝杆(16),所述第一端板(20)的一侧安装有第一驱动电机(14),所述第二端板(21)的内侧上安装有蓄电池(22),所述第二端板(21)的外侧上安装有电源连接插座(10)和控制盒(23),所述第一端板(20)的一侧连接有垃圾清理机构(3),所述垃圾清理机构(3)的中部安装有进料管(313),所述进料管(313)的一端焊接有垃圾收集斗(6),所述垃圾收集斗(6)的一侧焊接有连接杆固定架(24),所述连接杆固定架(24)的一侧中部焊接有连接杆(7),所述连接杆(7)的一端安装有微型摄像头(8),所述连接杆固定架(24)的另一侧中部安装有第二驱动电机(18),所述第二驱动电机(18)上连接有绞龙(19)。
2.根据权利要求1所述的一种基于物联网的市政管道垃圾清理机器人,其特征在于:所述无线遥控器(2)上安装有显示器(201)和操控手柄(202)。
3.根据权利要求1所述的一种基于物联网的市政管道垃圾清理机器人,其特征在于:所述第一驱动轮调节机构(4)和第二驱动轮调节机构(5)均由活动板(401)、第一臂杆活动连接头(402)、第二连接头(403)、第二电动伸缩杆(404)、第三臂杆(405)、驱动轮安装架(406)、驱动轮(407)、驱动电机(408)、第四臂杆(409)和丝杆螺纹套(410)构成。
4.根据权利要求3所述的一种基于物联网的市政管道垃圾清理机器人,其特征在于:所述第三臂杆(405)通过第一臂杆活动连接头(402)分别与第一端板(20)和第二端板(21)相连,所述第一端板(20)和第二端板(21)上通过第二连接头(403)与第二电动伸缩杆(404)相连,所述第二电动伸缩杆(404)的一端通过第二连接头(403)与活动板(401)相连,活动板(401)通过第一臂杆活动连接头(402)与第四臂杆(409)相连,所述第四臂杆(409)与第三臂杆(405)的中部通过连接头相连。
5.根据权利要求3所述的一种基于物联网的市政管道垃圾清理机器人,其特征在于:所述第三臂杆(405)的一端安装有驱动轮安装架(406),所述驱动轮安装架(406)上安装有第三驱动电机(408),所述第三驱动电机(408)上安装有驱动轮(407),所述驱动轮(407)上设有防滑钉。
6.根据权利要求3所述的一种基于物联网的市政管道垃圾清理机器人,其特征在于:所述活动板(401)的中部安装有丝杆螺纹套(410),所述丝杆螺纹套(410)与丝杆(16)通过螺纹相连。
7.根据权利要求1所述的一种基于物联网的市政管道垃圾清理机器人,其特征在于:所述垃圾清理机构(3)由伸缩臂安装板(301)、第一臂杆(302)、第二臂杆(303)、刮刀固定架(304)、毛刷(305)、刮刀(306)、第二臂杆活动连接头(307)、第一电动伸缩杆(308)、第一轴承(309)、套筒(310)、齿轮盘(311)、第二轴承(312)和进料管(313)构成。
8.根据权利要求7所述的一种基于物联网的市政管道垃圾清理机器人,其特征在于:所述伸缩臂安装板(301)的中部焊接有套筒(310),所述套筒(310)的一端连接有第一轴承(309),所述套筒(310)的另一端连接有第二轴承(312),所述第一轴承(309)和第二轴承(312)均焊接在进料管(313)上,所述进料管(313)焊接在内架(12)上,所述进料管(313)的一端连接有垃圾输送管(9),所述套筒(310)上焊接有齿轮盘(311),所述齿轮盘(311)上的齿轮与第一驱动电机(14)转轴上的齿轮啮合。
9.根据权利要求7所述的一种基于物联网的市政管道垃圾清理机器人,其特征在于:所述伸缩臂安装板(301)上通过第二臂杆活动连接头(307)分别安装有第一臂杆(302)和第二臂杆(303),所述第一臂杆(302)的一端安装有刮刀固定架(304),所述刮刀固定架(304)上安装有毛刷(305)和刮刀(306),所述第一臂杆(302)上还通过第二臂杆活动连接头(307)与第一电动伸缩杆(308)相连,所述第一电动伸缩杆(308)通过第二臂杆活动连接头(307)安装在第一轴承(309)上。
10.根据权利要求1所述的一种基于物联网的市政管道垃圾清理机器人,其特征在于:所述蓄电池(22)与控制盒(23)电性连接,所述控制盒(23)分别与微型摄像头(8)、第一驱动电机(14)、第四驱动电机(15)、第二驱动电机(18)、第一电动伸缩杆(308)、第二电动伸缩杆(404)和第三驱动电机(408)电性连接,所述控制盒(23)通过无线网络与无线遥控器(2)相连,所述微型摄像头(8)通过无线网络与无线遥控器(2)上的显示器(201)相连,所述微型摄像头(8)采用夜视摄像头。
11.根据权利要求1所述的一种基于物联网的市政管道垃圾清理机器人,其特征在于:所述外壳(11)上设有与活动板(401)相匹配的滑槽(17),所述电源连接插座(10)上连接有电源线。
技术总结
本发明公开了一种基于物联网的市政管道垃圾清理机器人,包括机器人本体和无线遥控器,机器人本体包括外壳和内架,内架的一端连接有第一端板,第一端板上安装有第一驱动轮调节机构,内架的另一端连接有第二端板,该机器人可以在不同直径的市政管道内行走;具有管道内部拍摄回传功能可以直观的看到管道内部的情况,该机器人连接有电源线,实时给机器人供电,机器人内部也有蓄电池,防止外接电源断电无法进行控制,该机器人防滑性能好,不会在管道内出现打滑空转的现象;该机器人身上的铲刀在工作的时候能旋转,能对管壁的任何位置进行清理,还搭配了毛刷,对铲过后的内部进行扫刷,达到再次清理的目的,整体灵活性强,适应性能强。
技术研发人员:吴鹏,杨涛,闫春华,李季,蒋自超,储徐灿,刘悦,郭永刚,张航
受保护的技术使用者:安徽建工建设投资集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!