设备控制系统、方法及存储介质与流程
本申请涉及激光加工头控制,具体涉及一种设备控制系统、方法及存储介质。
背景技术:
1、相关技术中,激光清洗头的控制信号可以通过控制板经由xy2-100协议传输至振镜电机驱动板,再由振镜电机驱动板输出相应的控制信号至振镜电机。
2、然而,xy-100协议比较复杂,对控制器的性能要求比较高,使得设备研发成本提高。
3、因此,如何降低控制方式的复杂性以及对控制的性能要求、设备研发成本,是当前激光加工头控制技术领域亟需解决地技术问题。
技术实现思路
1、本申请提供一种设备控制系统、方法及存储介质,旨在解决如何降低控制方式的复杂性以及对控制的性能要求、设备研发成本的技术问题。
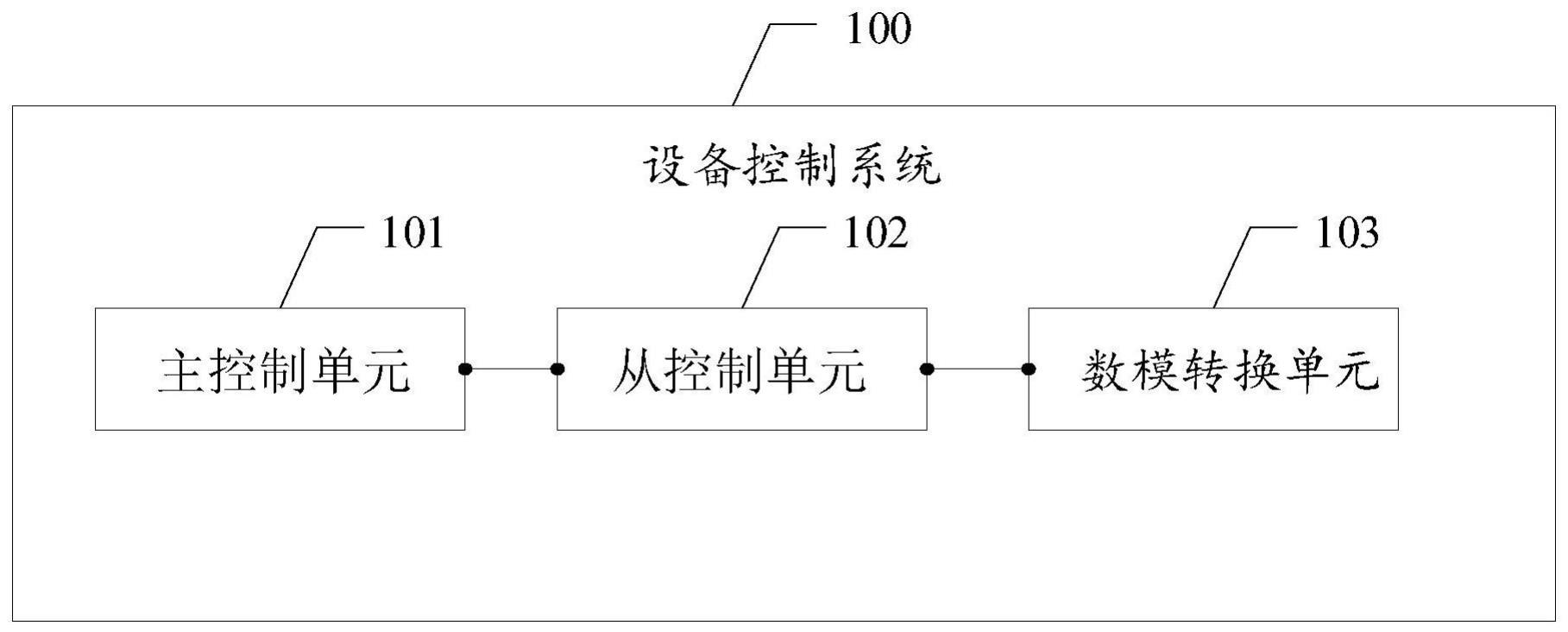
2、一方面,本申请提供一种设备控制系统,包括:
3、主控制单元,所述主控制单元用于获取激光清洗器的振镜电机的电机工作参数;
4、从控制单元,与所述主控制单元相连接,所述从控制单元用于接收由所述主控制单元发送的电机工作参数,并基于所述电机工作参数生成初始三角波控制信号;
5、数模转换单元,与所述从控制单元相连接,所述数模转换单元用于接收所述初始三角波控制信号,并基于所述初始三角波控制信号生成目标三角波控制信号,所述目标三角波控制信号用于控制所述振镜电机的运动。
6、另一方面,本申请提供一种设备控制方法,所述方法包括:
7、通过主控制单元获取激光清洗器的振镜电机的电机工作参数;
8、通过从控制单元接收由所述主控制单元发送的电机工作参数,并基于所述电机工作参数生成初始三角波控制信号;
9、通过数模转换单元接收所述初始三角波控制信号,并基于所述初始三角波控制信号生成目标三角波控制信号,所述目标三角波控制信号用于控制所述振镜电机的运动。
10、另一方面,本申请还提供一种计算机设备,所述计算机设备包括:
11、一个或多个处理器;
12、存储器;以及
13、一个或多个应用程序,其中所述一个或多个应用程序被存储于所述存储器中,并配置为由所述处理器执行以实现所述的设备控制方法。
14、另一方面,本申请还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器进行加载,以执行所述的设备控制方法中的步骤。
15、本申请实施例提供的设备控制系统,具体包括主控制单元,所述主控制单元用于获取激光清洗器的振镜电机的电机工作参数;从控制单元,与所述主控制单元相连接,所述从控制单元用于接收由所述主控制单元发送的电机工作参数,并基于所述电机工作参数生成初始三角波控制信号;数模转换单元,与所述从控制单元相连接,所述数模转换单元用于接收所述初始三角波控制信号,并基于所述初始三角波控制信号生成目标三角波控制信号,所述目标三角波控制信号用于控制所述振镜电机的运动。本申请实施例通过主控制单元获取激光清洗器的振镜电机的电机工作参数,然后通过从控制单元接收由所述主控制单元发送的电机工作参数,并基于所述电机工作参数生成初始三角波控制信号,再通过数模转换单元接收所述初始三角波控制信号,并基于所述初始三角波控制信号生成目标三角波控制信号,已通过目标三角波控制信号控制所述振镜电机的运动,实现了无须进行pid参数整定,并可对目标三角波控制信号进行个性化定制输出,避免重复的实验,降低了控制方式的复杂性、对控制的性能要求以及设备研发成本。
技术特征:
1.一种设备控制系统,其特征在于,包括:
2.根据权利要求1所述的设备控制系统,其特征在于,所述初始三角波控制信号包括多个阶梯,每个所述阶梯的长度表征阶梯步停时间,每个所述阶梯的高度表征阶梯步进电压;
3.根据权利要求2所述的设备控制系统,其特征在于,所述电机工作参数包括电机幅面、电机摆动频率,所述电压数据包括电压幅值和阶梯步近电压;
4.根据权利要求3所述的设备控制系统,其特征在于,所述基于所述电机幅面,确定所述电压幅值,包括:
5.根据权利要求3所述的设备控制系统,其特征在于,所述基于所述电机摆动频率,确定所述阶梯步近电压,包括:
6.根据权利要求2所述的设备控制系统,其特征在于,所述振镜电机包括n个振镜电机;
7.根据权利要求1所述的设备控制系统,其特征在于,所述设备控制系统还包括设备驱动板,所述设备驱动板与所述数模转换单元相连接,所述设备驱动板用于接收由所述数模转换单元发送的三角波控制信号,以控制所述振镜电机的运动。
8.根据权利要求1所述的设备控制系统,其特征在于,所述主控制单元和所述从控制单元之间采用spi总线的通信方式,所述spi总线用于对所述电机工作参数进行累加和校验处理。
9.一种设备控制方法,其特征在于,所述方法包括:
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序被处理器进行加载,以执行权利要求9所述的设备控制方法中的步骤。
技术总结
本申请提供一种设备控制系统、方法及存储介质,设备控制系统包括主控制单元,主控制单元用于获取激光清洗器的振镜电机的电机工作参数;从控制单元,与主控制单元相连接,从控制单元用于接收由主控制单元发送的电机工作参数,并基于电机工作参数生成初始三角波控制信号;数模转换单元,与从控制单元相连接,所述数模转换单元用于接收初始三角波控制信号,并基于初始三角波控制信号生成目标三角波控制信号,目标三角波控制信号用于控制振镜电机的运动。本申请实施例实现了无须进行PID参数整定,并可对目标三角波控制信号进行个性化定制输出,避免重复的实验,降低了控制方式的复杂性、对控制的性能要求以及设备研发成本。
技术研发人员:严国鹏,黄荣,施建宏,闫大鹏
受保护的技术使用者:武汉锐科光纤激光技术股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!