一种管道清淤堵仿生蛇形机器人
本发明涉及管理管道疏通,更进一步涉及一种管道清淤堵仿生蛇形机器人。
背景技术:
1、管道清淤方式主要采用三种方式:箱涵清淤机器人,高压水射流,吸污车,但是三种方式均存在一定缺陷:箱涵清淤机器人,利用履带在管道内移动,仅能应用于大型管道、河道等地方,作业范围要求大;高压水射流、吸污车清淤方式对于复杂的管道例如u型管道或者是s型管道清淤效果差,甚至会有有无法清理或是导致管道破裂的风险。
2、传统的清淤方法一方面无法高效清理复杂管道的淤堵问题,另一方面无法满足大规模应用的要求。对于本领域的技术人员来说,如何在复杂管道内移动,针对复杂管道进行高效清理淤堵,是目前需要解决的技术问题。
技术实现思路
1、本发明提供一种管道清淤堵仿生蛇形机器人,能够实现蠕动行走与蜿蜒转向,更好地适应管道内部复杂曲折的路线,具有更加广泛的适用性,具体方案如下:
2、一种管道清淤堵仿生蛇形机器人,包括:
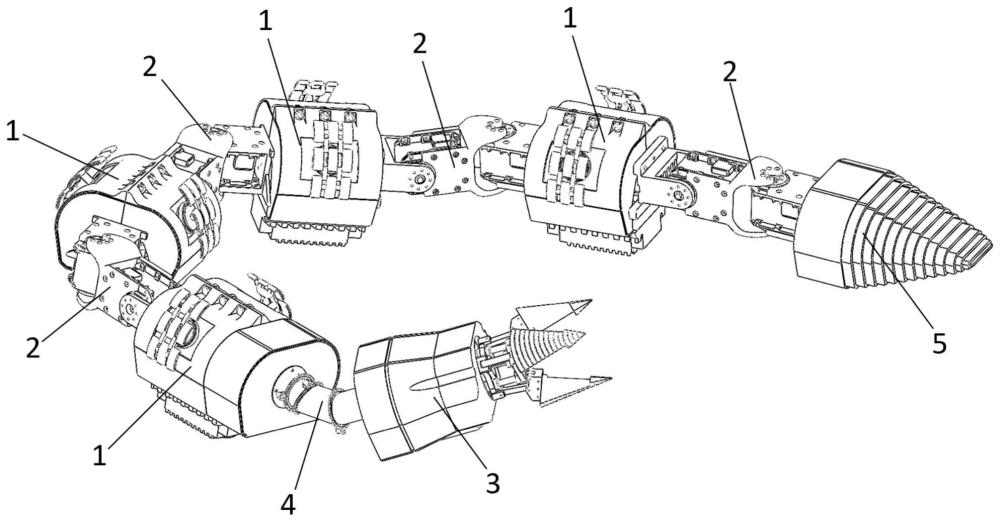
3、蠕动动力装置,包括蠕动基壳、蠕动动力组件、蠕动脚,所述蠕动动力组件安装于所述蠕动基壳、用于带动所述蠕动脚往复摆动,用以实现蠕动行走;
4、蜿蜒动力装置,包括第一连接块、中间过渡块、第二连接块、蜿蜒驱动器,所述第一连接块与所述中间过渡块转动连接、并通过一个所述蜿蜒驱动器驱动旋转,所述中间过渡块与所述第二连接块转动连接、并通过一个所述蜿蜒驱动器驱动旋转,以使所述第一连接块和所述第二连接块产生至少两个垂直维度的转动;相邻的两个所述蠕动动力装置分别安装于所述第一连接块和所述第二连接块;
5、作业装置,安装于所述蠕动动力装置或所述蜿蜒动力装置;其包括作业基壳、作业动力组件、作业钻爪,所述作业动力组件安装于所述作业基壳、用于带动所述作业钻爪转动,用以实现旋转清淤。
6、可选地,所述蠕动动力组件包括蠕动动力电机、第一连杆、第二连杆、第三连杆,所述第一连杆、所述第二连杆、所述第三连杆依次首尾铰接,所述蠕动动力电机用于驱动所述第一连杆旋转,所述第一连杆围绕一端转动,另一端通过所述第二连杆带动所述第三连杆摆动;
7、所述第三连杆带动所述蠕动脚摆动。
8、可选地,所述蠕动动力装置包括设置于所述蠕动动力组件和所述蠕动脚之间的换向组件,所述换向组件用于调转所述蠕动脚的方向;
9、所述换向组件包括载荷轴承、转动座、换向电机,所述蠕动动力组件安装于所述载荷轴承的内圈,所述转动座安装于所述载荷轴承的外圈;所述换向电机安装于所述载荷轴承的内圈,用于通过齿轮驱动所述转动座旋转。
10、可选地,还包括随动装置,所述随动装置包括底板连杆和底板缓冲器,所述底板连杆的两端和所述底板缓冲器的两端分别铰接于所述换向组件与所述蠕动脚;
11、所述底板连杆为刚性件,所述底板缓冲器能够弹性伸缩。
12、可选地,所述蠕动脚包括腕部主体、伸缩驱动器、腕部底板,所述伸缩驱动器安装于所述腕部主体;
13、所述腕部底板设置啮合齿、所述伸缩驱动器通过齿轮啮合于所述啮合齿,以使所述腕部底板相对于所述腕部主体滑移伸缩。
14、可选地,所述蠕动动力装置还包括侧边支撑装置,所述侧边支撑装置包括滑动外伸装置和支撑架,所述外伸装置安装于所述蠕动基壳,用于驱动所述支撑架沿径向移动,所述支撑架能够顶在管道内壁实现支撑。
15、可选地,所述支撑架包括支架座、伸缩支杆、铰接块,若干所述铰接块相互铰接形成阵列,所述铰接块通过所述伸缩支杆连接于所述支架座;
16、所述支架座安装于所述滑动外伸装置。
17、可选地,所述滑动外伸装置包括外伸驱动器、齿条杆、外伸缓冲件,所述外伸驱动器安装于所述蠕动基壳,所述齿条杆滑动插装于所述蠕动基壳,所述外伸驱动器通过齿轮啮合于所述齿条杆实现驱动;
18、所述外伸缓冲件套装于所述齿条杆,用于对所述支撑架提供缓冲。
19、可选地,所述第一连接块与所述中间过渡块之间、所述中间过渡块与所述第二连接块之间分别设置限位转动盘。
20、可选地,所述作业装置还包括开合驱动件,所述开合驱动件包括开合支座、开合滑座、开合拉杆、伸缩轴杆;所述开合支座能够由所述作业动力组件驱动旋转;
21、所述伸缩轴杆安装于所述开合支座、用于驱动所述开合滑座移动,所述开合拉杆的一端铰接于所述开合滑座;
22、所述作业钻爪包括至少设置两个,每个所述作业钻爪铰接于所述开合支座,所述开合拉杆的另一端铰接于所述作业钻爪;当所述开合滑座移动时,通过所述开合拉杆驱动所述作业钻爪闭合与张开;
23、所述作业钻爪闭合时能够拼接形成锥形钻头,所述作业钻爪张开时能够实现扩张清堵;
24、作业钻爪分别设置轴向压力传感器与径向压力传感器。
25、可选地,所述作业动力组件包括设置于作业基壳当中的作业电机和作业齿轮,所述作业齿轮用于啮合驱动所述开合支座旋转。
26、可选地,还包括设置于所述作业装置和所述蠕动动力装置之间的矢量连接装置,所述矢量连接装置包括矢量连接件、矢量脖和矢量驱动器,所述矢量脖至少设置两段,所述矢量连接件和所述矢量脖相对转动连接,所述矢量脖上设置外齿,每个所述矢量驱动器对应一个所述矢量脖,并与所述矢量脖上的外齿啮合传动,使所述矢量脖转动;
27、两个所述矢量脖之间的转轴、所述矢量连接件与所述矢量脖之间的转轴存在夹角,用于调节所述作业装置的朝向。
28、可选地,还包括安装于所述蜿蜒动力装置的尾部装置,所述尾部装置与所述作业装置分别位于两端;
29、所述尾部装置的外形横截面朝向端部渐缩。
30、可选地,所述作业装置和所述尾部装置分别设置识别装置,所述识别装置包括距离传感器和/或摄像探头。
31、可选地,所述蜿蜒动力装置的外部罩设安装螺纹管,所述螺纹管位于所述作业装置与所述蠕动动力装置之间、两个所述蠕动动力装置之间、所述蠕动动力装置与所述尾部装置之间。
32、本发明提供一种管道清淤堵仿生蛇形机器人,通过设置蠕动动力装置,借助蠕动动力组件带动蠕动脚往复摆动,实现蠕动行走,可以实现在管道内的移动,模拟脚部运动的形式到达管道内的淤堵位置;蜿蜒动力装置第一连接块与中间过渡块转动连接、并通过一个蜿蜒驱动器驱动旋转,中间过渡块与第二连接块转动连接、并通过一个蜿蜒驱动器驱动旋转,第一连接块和第二连接块产生至少两个垂直维度的转动,从而适应于管道内部弯曲部分,通过性更好。当到达淤堵位置时,作业装置的作业动力组件带动作业钻爪转动,用以实现旋转清淤。本发明通过蠕动动力装置和蜿蜒动力装置的组合,实现蠕动行走与蜿蜒转向,能够适应管道内部复杂曲折的路线,具有更加广泛的适用性。
技术特征:
1.一种管道清淤堵仿生蛇形机器人,其特征在于,包括:
2.根据权利要求1所述的管道清淤堵仿生蛇形机器人,其特征在于,所述蠕动动力组件(12)包括蠕动动力电机(121)、第一连杆(122)、第二连杆(123)、第三连杆(124),所述第一连杆(122)、所述第二连杆(123)、所述第三连杆(124)依次首尾铰接,所述蠕动动力电机(121)用于驱动所述第一连杆(122)旋转,所述第一连杆(122)围绕一端转动,另一端通过所述第二连杆(123)带动所述第三连杆(124)摆动;
3.根据权利要求2所述的管道清淤堵仿生蛇形机器人,其特征在于,所述蠕动动力装置(1)包括设置于所述蠕动动力组件(12)和所述蠕动脚(13)之间的换向组件(14),所述换向组件(14)用于调转所述蠕动脚(13)的方向;
4.根据权利要求3所述的管道清淤堵仿生蛇形机器人,其特征在于,还包括随动装置(15),所述随动装置(15)包括底板连杆(151)和底板缓冲器(152),所述底板连杆(151)的两端和所述底板缓冲器(152)的两端分别铰接于所述换向组件(14)与所述蠕动脚(13);
5.根据权利要求3所述的管道清淤堵仿生蛇形机器人,其特征在于,所述蠕动脚(13)包括腕部主体(131)、伸缩驱动器(132)、腕部底板(133),所述伸缩驱动器(132)安装于所述腕部主体(131);
6.根据权利要求1所述的管道清淤堵仿生蛇形机器人,其特征在于,所述蠕动动力装置(1)还包括侧边支撑装置(16),所述侧边支撑装置(16)包括滑动外伸装置(161)和支撑架(162),所述外伸装置(161)安装于所述蠕动基壳(11),用于驱动所述支撑架(162)沿径向移动,所述支撑架(162)能够顶在管道内壁实现支撑。
7.根据权利要求6所述的管道清淤堵仿生蛇形机器人,其特征在于,所述支撑架(162)包括支架座(1621)、伸缩支杆(1622)、铰接块(1623),若干所述铰接块(1623)相互铰接形成阵列,所述铰接块(1623)通过所述伸缩支杆(1622)连接于所述支架座(1621);
8.根据权利要求7所述的管道清淤堵仿生蛇形机器人,其特征在于,所述滑动外伸装置(161)包括外伸驱动器(1611)、齿条杆(1612)、外伸缓冲件(1613),所述外伸驱动器(1611)安装于所述蠕动基壳(11),所述齿条杆(1612)滑动插装于所述蠕动基壳(11),所述外伸驱动器(1611)通过齿轮啮合于所述齿条杆(1612)实现驱动;
9.根据权利要求1所述的管道清淤堵仿生蛇形机器人,其特征在于,所述第一连接块(21)与所述中间过渡块(22)之间、所述中间过渡块(22)与所述第二连接块(23)之间分别设置限位转动盘(25)。
10.根据权利要求1所述的管道清淤堵仿生蛇形机器人,其特征在于,所述作业装置(3)还包括开合驱动件(34),所述开合驱动件(34)包括开合支座(341)、开合滑座(342)、开合拉杆(343)、伸缩轴杆(344);所述开合支座(341)能够由所述作业动力组件(32)驱动旋转;
11.根据权利要求10所述的管道清淤堵仿生蛇形机器人,其特征在于,所述作业动力组件(32)包括设置于作业基壳(31)当中的作业电机(321)和作业齿轮(322),所述作业齿轮(322)用于啮合驱动所述开合支座(341)旋转。
12.根据权利要求1所述的管道清淤堵仿生蛇形机器人,其特征在于,还包括设置于所述作业装置(3)和所述蠕动动力装置(1)之间的矢量连接装置(4),所述矢量连接装置(4)包括矢量连接件(41)、矢量脖(42)和矢量驱动器(43),所述矢量脖(42)至少设置两段,所述矢量连接件(41)和所述矢量脖(42)相对转动连接,所述矢量脖(42)上设置外齿,每个所述矢量驱动器(43)对应一个所述矢量脖(42),并与所述矢量脖(42)上的外齿啮合传动,使所述矢量脖(42)转动;
13.根据权利要求1所述的管道清淤堵仿生蛇形机器人,其特征在于,还包括安装于所述蜿蜒动力装置(2)的尾部装置(5),所述尾部装置(5)与所述作业装置(3)分别位于两端;
14.根据权利要求13所述的管道清淤堵仿生蛇形机器人,其特征在于,所述作业装置(3)和所述尾部装置(5)分别设置识别装置(6),所述识别装置(6)包括距离传感器(61)和/或摄像探头(62)。
15.根据权利要求13所述的管道清淤堵仿生蛇形机器人,其特征在于,所述蜿蜒动力装置(2)的外部罩设安装螺纹管(7),所述螺纹管(7)位于所述作业装置(3)与所述蠕动动力装置(1)之间、两个所述蠕动动力装置(1)之间、所述蠕动动力装置(1)与所述尾部装置(5)之间。
技术总结
本发明公开一种管道清淤堵仿生蛇形机器人,涉及管理管道疏通技术领域,借助蠕动动力组件带动蠕动脚往复摆动,实现蠕动行走,可以实现在管道内的移动,模拟脚部运动的形式到达管道内的淤堵位置;蜿蜒动力装置第一连接块与中间过渡块转动连接、并通过一个蜿蜒驱动器驱动旋转,中间过渡块与第二连接块转动连接、并通过一个蜿蜒驱动器驱动旋转,第一连接块和第二连接块产生至少两个垂直维度的转动,从而适应于管道内部弯曲部分,通过性更好。当到达淤堵位置时,作业装置的作业动力组件带动作业钻爪转动,实现旋转清淤。通过蠕动动力装置和蜿蜒动力装置的组合,实现蠕动行走与蜿蜒转向,能够适应管道内部复杂曲折的路线,具有更加广泛的适用性。
技术研发人员:赵颖,田硕彤,张熙雷,王月强,李云伍
受保护的技术使用者:西南大学
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!