一种带垃圾疏通装置的水池清洁机器人的制作方法
本技术涉及水池清洁领域,特别是涉及水池清洁机器人。
背景技术:
1、随着社会经济的发展和人们生活水平的不断提高,人们对文化娱乐设施的要求更高,游泳作为一项健身运动受到越来越多的人欢迎,泳池在使用中池底会积累污渍,需要进行清洗。由于人工清理泳池费时费力,所以现有的泳池常用水池清洁机器人进行清洁。
2、目前,部分水池清洁机器人,利用抽水机构从底部进水口把垃圾和水吸入进水口103,通过滤网将垃圾过滤后留存在垃圾收纳容器中,达到水池清洁的目的。然而,在实际使用中,有时由于吸起的垃圾体积较大或粘性较高,可能在进水口处产生堵塞,使得机器人无法继续清洁泳池,需要人手动对进水口进行疏通,费时费力。
技术实现思路
1、基于此,本实用新型的目的在于,提供一种带垃圾疏通装置的水池清洁机器人,其具有能方便的对泳池机器人进水口的垃圾进行疏通的优点。
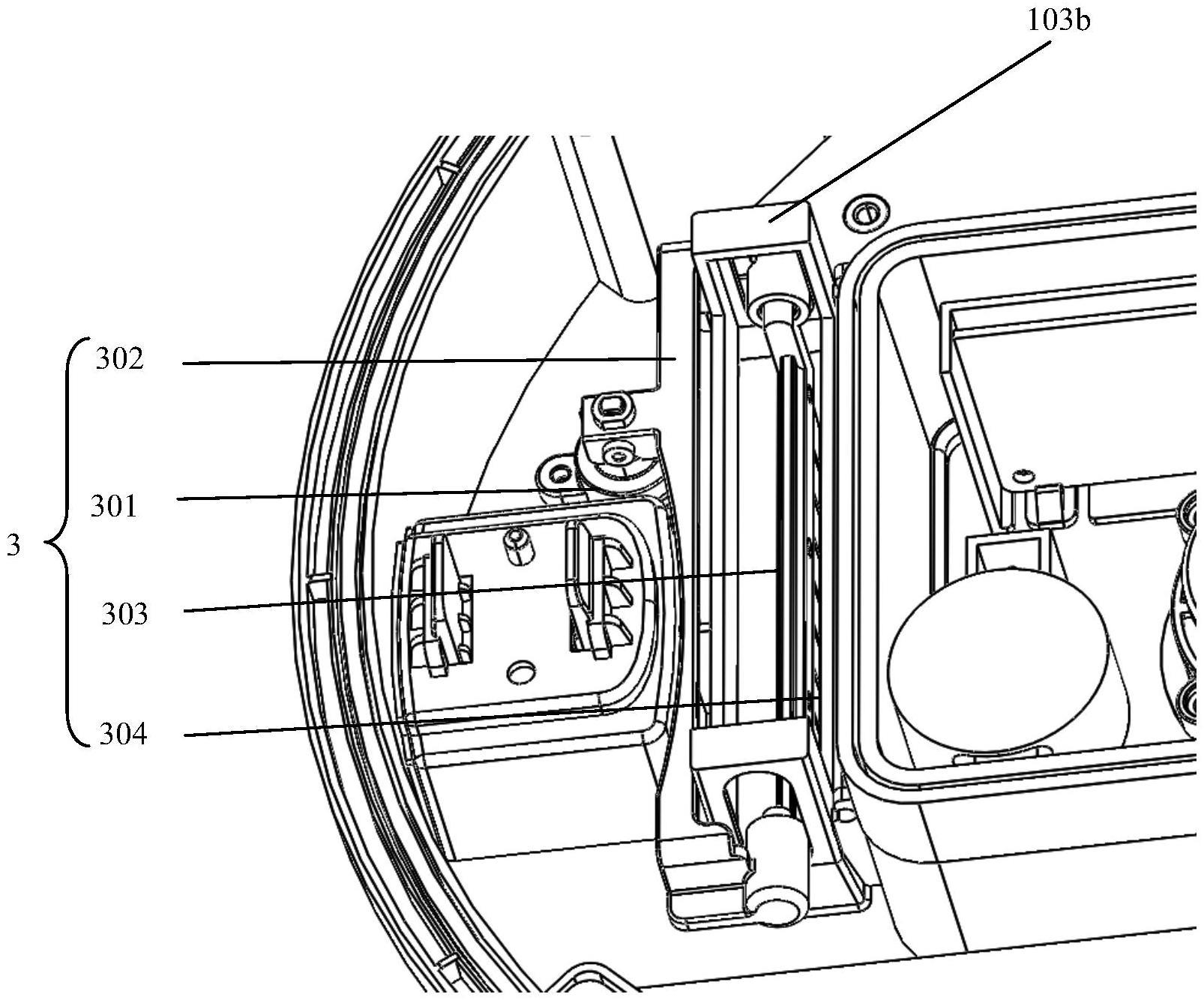
2、一种带垃圾疏通装置的水池清洁机器人,包括机身主体、清洁模块和控制系统,控制系统设置在机身主体上,并与清洁模块电连接;其特征在于:还包括垃圾疏通装置;所述机身主体设有一内腔,所述清洁模块设置在所述内腔内;所述机身主体底部设有至少一个进水口,所述进水口连通所述内腔和外部;所述垃圾疏通装置包括动力元件、固定臂和横梁;所述动力元件设置在所述内腔内,所述固定臂的一端与所述动力元件的输出端固定连接,所述固定臂的另一端与所述横梁固定连接,所述横梁位于所述进水口处;当所述动力元件推动输出端作往复运动时,所述固定臂带动所述横梁沿进水口水流方向作往复运动。
3、本实用新型所述的一种带垃圾疏通装置的水池清洁机器人,通过动力元件推动输出端作往复运动,带动横梁沿进水口水流方向作往复运动,能疏通水池清洁机器人工作时进水口处堵塞的垃圾。
4、进一步地,所述进水口的两端还设有两个导轨,所述导轨与所述进水口的水流方向平行,所述固定臂的至少一部分可滑动地卡设在所述导轨中。
5、进一步地,所述垃圾疏通装置包括刮板,所述刮板固定连接在所述横梁上,所述刮板上设有分散分布的若干刮齿。
6、或,所述垃圾疏通装置包括刮板,所述刮板转动连接于所述横梁上,工作时,所述刮板在垂直于进水方向的平面内转动。
7、进一步地,所述刮板上设有分散分布的若干刮齿,若干所述刮齿的方向平行和/或与进水方向呈一定角度设置。
8、进一步地,所述清洁模块包括抽水机构,所述抽水机构通过进水口与外界连通;所述所述控制系统包括电流监测装置,当清洁模块工作时,所述电流监测装置实时监测所述抽水机构的工作电流,当所述电流监测装置监测到所述抽水机构的工作电流低于预设的电流阈值时,控制系统启动所述动力元件。
9、进一步地,所述控制系统包括反馈电路,当所述动力元件启动时,所述反馈电路发出反馈信号给所述抽水机构,使所述抽水机构加大工作电压。
10、进一步地,所述控制系统包括计数电路和靠岸控制电路;当所述动力元件启动时,所述计数电路对所述刮板的往复运动次数进行计数,当计数超过预设次数时,将警报信号传输给所述靠岸控制电路;所述靠岸控制电路接收到警报信号后,控制所述动力驱动模块,驱动水池清洁机器人靠岸。
11、进一步地,还包括显示机构,所述计数电路将警报信号传输给所述靠岸控制电路时,也会传输给所述显示机构。
12、进一步地,所述动力驱动模块包括第一水泵和第二水泵;所述机身主体中设有第一容纳腔和第二容纳腔;所述第一水泵设置于所述第一容纳腔内,所述第二水泵设置于所述第二容纳腔内;所述第一容纳腔和所述
13、为了更好地理解和实施,下面结合附图详细说明本实用新型。
技术特征:
1.一种带垃圾疏通装置的水池清洁机器人,包括机身主体、清洁模块和控制系统,控制系统设置在机身主体上,并与清洁模块电连接;其特征在于:还包括垃圾疏通装置;所述机身主体设有一内腔,所述清洁模块设置在所述内腔内;所述机身主体底部设有至少一个进水口,所述进水口连通所述内腔和外部;所述垃圾疏通装置包括动力元件、固定臂和横梁;所述动力元件设置在所述内腔内,所述固定臂的一端与所述动力元件的输出端固定连接,所述固定臂的另一端与所述横梁固定连接,所述横梁位于所述进水口处;当所述动力元件推动输出端作往复运动时,所述固定臂带动所述横梁沿进水口水流方向作往复运动。
2.根据权利要求1所述的一种带垃圾疏通装置的水池清洁机器人,其特征在于:所述进水口的两端还设有两个导轨,所述导轨与所述进水口的水流方向平行,所述固定臂的至少一部分可滑动地卡设在所述导轨中。
3.根据权利要求2所述的一种带垃圾疏通装置的水池清洁机器人,其特征在于:所述垃圾疏通装置包括刮板,所述刮板固定连接在所述横梁上,所述刮板上设有分散分布的若干刮齿。
4.根据权利要求3所述的一种带垃圾疏通装置的水池清洁机器人,其特征在于:所述刮板转动连接于所述横梁上,工作时,所述刮板在垂直于进水方向的平面内转动。
5.根据权利要求3或4任一所述的一种带垃圾疏通装置的水池清洁机器人,其特征在于:若干所述刮齿的方向平行和/或与进水方向呈一定角度设置。
6.根据权利要求5所述的一种带垃圾疏通装置的水池清洁机器人,其特征在于:所述清洁模块包括抽水机构,所述抽水机构通过进水口与外界连通;所述控制系统包括电流监测装置,当清洁模块工作时,所述电流监测装置实时监测所述抽水机构的工作电流,当所述电流监测装置监测到所述抽水机构的工作电流低于预设的电流阈值时,控制系统启动所述动力元件。
7.根据权利要求6所述的一种带垃圾疏通装置的水池清洁机器人,其特征在于:所述控制系统包括反馈电路,当所述动力元件启动时,所述反馈电路发出反馈信号给所述抽水机构,使所述抽水机构加大工作电压。
8.根据权利要求7所述的一种带垃圾疏通装置的水池清洁机器人,其特征在于:还包括动力驱动模块;所述控制系统包括计数电路和靠岸控制电路;当所述动力元件启动时,所述计数电路对所述刮板的往复运动次数进行计数,当计数超过预设次数时,将警报信号传输给所述靠岸控制电路;所述靠岸控制电路接收到警报信号后,控制所述动力驱动模块,驱动水池清洁机器人靠岸。
9.根据权利要求8所述的一种带垃圾疏通装置的水池清洁机器人,其特征在于:还包括显示机构,所述计数电路将警报信号传输给所述靠岸控制电路时,也会传输给所述显示机构。
10.根据权利要求9所述的一种带垃圾疏通装置的水池清洁机器人,其特征在于:所述动力驱动模块包括第一水泵和第二水泵;所述机身主体中设有第一容纳腔和第二容纳腔;所述第一水泵设置于所述第一容纳腔内,所述第二水泵设置于所述第二容纳腔内;所述第一容纳腔和所述第二容纳腔分别通过第一出水口和第二出水口和外界联通。
技术总结
本技术涉及一种带垃圾疏通装置的水池清洁机器人。本技术所述的带垃圾疏通装置的水池清洁机器人包括:包括机身主体、清洁模块和控制系统,其特征在于:还包括垃圾疏通装置;机身主体设有一内腔,清洁模块设置在内腔内;机身主体底部设有至少一个进水口,进水口连通所述内腔和外部;垃圾疏通装置包括动力元件、固定臂和横梁;动力元件设置在内腔内,固定臂的一端与动力元件的输出端固定连接,固定臂的另一端与所述横梁固定连接,横梁位于进水口处;当动力元件推动输出端作往复运动时,固定臂带动横梁沿进水口水流方向作往复运动。本技术所述的一种带垃圾疏通装置的水池清洁机器人具有能方便的对泳池机器人进水口的垃圾进行疏通的优点。
技术研发人员:姜继英,王紫辉
受保护的技术使用者:木兰家居科技(深圳)有限公司
技术研发日:20230309
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!