一种设有异物收集结构的管道机器人清理机构的制作方法
本技术涉及管道清理,具体为一种设有异物收集结构的管道机器人清理机构。
背景技术:
1、管道是用于运输介质的一种设备装置,使得管道对气体、液体与携带有固体颗粒物的流体进行运输使用,使得管道对用途进一步扩大使用,随着管道用途区域增加,需要定期对管道内部进行清理使用。
2、随着管道对携带有固体颗粒物的流体运输过程当中,依旧会残留大量的异物,导致管道内部堵塞,导致管道运输困难,且现有的管道清理结构需要通过管道机器人直接对管道推动清理,由于管道内部异物附着在线缆表面,增加对线缆的负重,并且当每次清理完成之后收卷线缆之后,需要对线缆进行清洗,增加后期作业内容。
技术实现思路
1、本实用新型的目的在于提供一种设有异物收集结构的管道机器人清理机构,以解决上述背景技术中提出管道内残留的异物导致管道内部堵塞,且管道内部异物附着在线缆表面,增加线缆的负重,并且使用完成之后,对线缆进行清洗内容增加的问题。
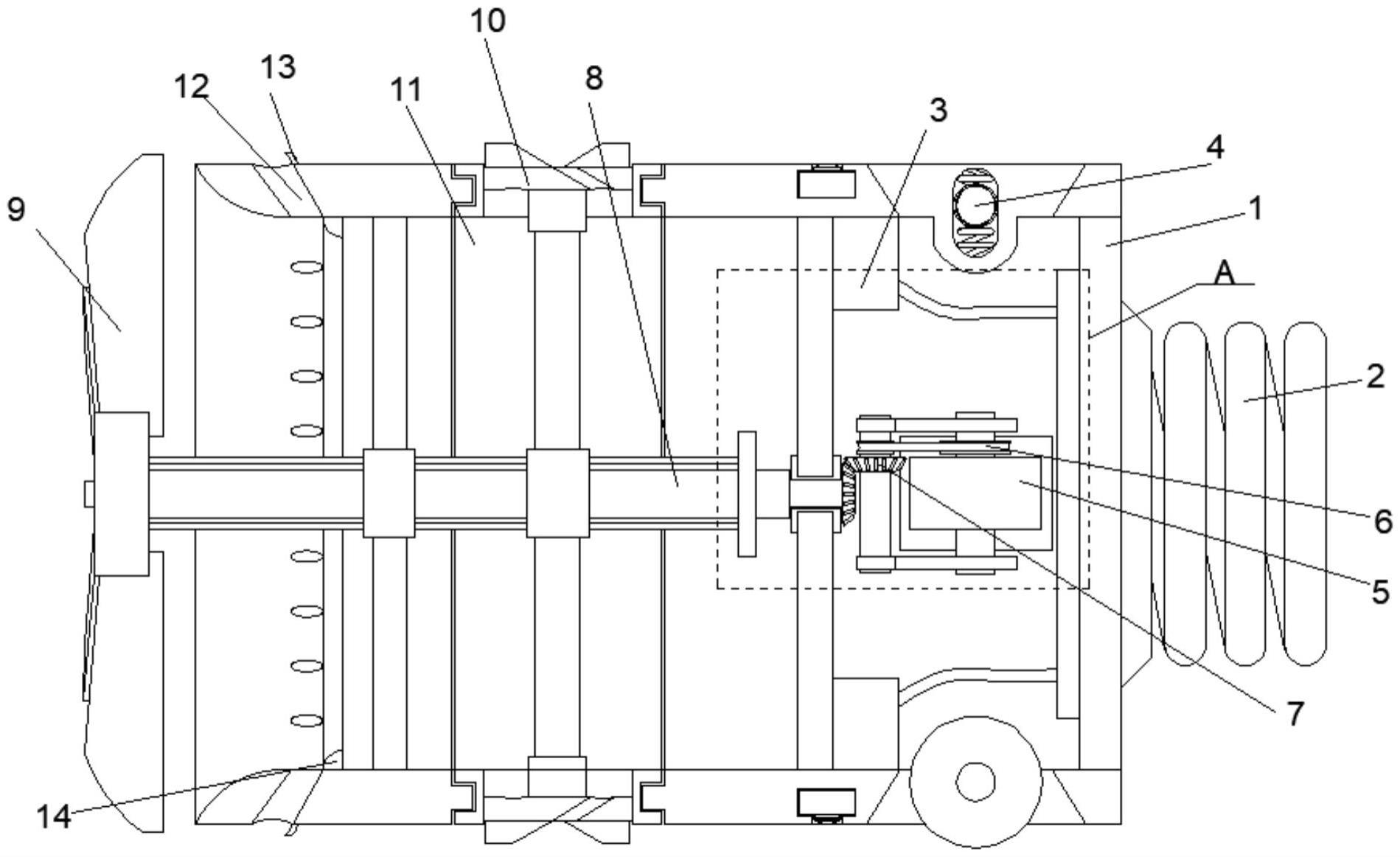
2、为实现上述目的,本实用新型提供如下技术方案:一种设有异物收集结构的管道机器人清理机构,包括壳体,其设置为圆筒状管体结构,所述壳体一侧设置有连接线,且连接线电连接控制器,所述控制器与电动车轮输出端对接,且电动车轮转动连接在壳体侧壁面内部,并且壳体内壁面设置有与电动车轮转动的板体结构;
3、辅助滚轮,其转动连接在所述壳体侧壁面内壁,所述壳体内壁设置有与辅助滚轮转动连接的l状板体结构,且辅助滚轮杆体一侧转动连接有限位轮,所述限位轮通过传动带与锥齿轮杆一一侧转动连接;
4、锥齿轮杆二,其一端与所述锥齿轮杆一啮合连接,所述锥齿轮杆二转动连接在壳体内部板体中间,且锥齿轮杆二另一端与破碎扇叶连接,所述锥齿轮杆二表面与搅动轮连接,且搅动轮的环形平面与转环侧壁面平齐。
5、采用上述技术方案,便于对管道内部异物清理使用,有效提高对管多啊内部进行清理使用。
6、优选的,所述壳体一侧设置为开口结构,且壳体开口内壁设置为弧形结构,所述壳体内部设置有与转环转动连接。
7、采用上述技术方案,便于转环控制联合使用,便于清理以及位移的联动使用。
8、优选的,所述电动车轮一侧贯穿壳体,且壳体呈环状等距交错转动连接设置有电动车轮和辅助滚轮。
9、采用上述技术方案,便于电动车轮与辅助滚轮配合推送壳体进行控制使用。
10、优选的,所述辅助滚轮贯穿壳体侧壁面与管道内壁相抵,且壳体的l状板体结构一侧与锥齿轮杆一一端对接。
11、采用上述技术方案,随着辅助滚轮的联动使用有效配合壳体进行控制使用。
12、优选的,所述锥齿轮杆一由杆体与滚轮和锥齿轮组合而成,且锥齿轮杆一的锥齿轮与锥齿轮杆二的锥齿轮啮合连接。
13、采用上述技术方案,使得锥齿轮杆一与锥齿轮杆二之间的啮合联动使用。
14、优选的,所述锥齿轮杆二表面与壳体之间设置有转动的轴承结构,且壳体内部呈环状等距设置有收集槽,所述收集槽一侧位于壳体外部设置有刮板,且壳体内壁一侧设置有挡板。
15、采用上述技术方案,便于锥齿轮杆二配合使用推送破碎扇叶对异物的收集处理。
16、与现有技术相比,本实用新型的有益效果是:该设有异物收集结构的管道机器人清理机构:
17、1.在使用该装置时,通过装置内部的安装在壳体一侧的电动车轮推动壳体向管道内部活动,使得壳体一侧设置的弧形凸起结构,将附着在管道内壁的异物向壳体内部堆积收集,配合外壁面的刮板进一步处理管道内部异物的处理清理使用;
18、2.通过装置内部的壳体开口一侧面向管道内部推送,使得连接线位于壳体一侧后方,有效避免连接线与管道内部异物堆积在连接线表面,便于对管道内部异物的收集作业使用,便于对管道内部清理使用;
19、3.通过装置内部的破碎扇叶对异物初步粉碎配合,壳体内部设置的搅动轮表面设置的绒毛对破碎的异物清理处理,使得异物顺着搅动轮与转环之间的缝隙进入壳体内部,通过收集槽进一步收集异物,加快对管道的清理效果。
技术特征:
1.一种设有异物收集结构的管道机器人清理机构,包括壳体(1)、辅助滚轮(5)和锥齿轮杆二(8),其特征在于:
2.根据权利要求1所述的一种设有异物收集结构的管道机器人清理机构,其特征在于:所述壳体(1)一侧设置为开口结构,且壳体(1)开口内壁设置为弧形结构,所述壳体(1)内部设置有与转环(11)转动连接。
3.根据权利要求1所述的一种设有异物收集结构的管道机器人清理机构,其特征在于:所述电动车轮(4)一侧贯穿壳体(1),且壳体(1)呈环状等距交错转动连接设置有电动车轮(4)和辅助滚轮(5)。
4.根据权利要求1所述的一种设有异物收集结构的管道机器人清理机构,其特征在于:所述辅助滚轮(5)贯穿壳体(1)侧壁面与管道内壁相抵,且壳体(1)的l状板体结构一侧与锥齿轮杆一(7)一端对接。
5.根据权利要求1所述的一种设有异物收集结构的管道机器人清理机构,其特征在于:所述锥齿轮杆一(7)由杆体与滚轮和锥齿轮组合而成,且锥齿轮杆一(7)的锥齿轮与锥齿轮杆二(8)的锥齿轮啮合连接。
6.根据权利要求1所述的一种设有异物收集结构的管道机器人清理机构,其特征在于:所述锥齿轮杆二(8)表面与壳体(1)之间设置有转动的轴承结构,且壳体(1)内部呈环状等距设置有收集槽(12),所述收集槽(12)一侧位于壳体(1)外部设置有刮板(13),且壳体(1)内壁一侧设置有挡板(14)。
技术总结
本技术公开了一种设有异物收集结构的管道机器人清理机构,包括:壳体,其设置为圆筒状管体结构,所述壳体一侧设置有连接线,且连接线电连接控制器,所述控制器与电动车轮输出端对接,且电动车轮转动连接在壳体侧壁面内部,并且壳体内壁面设置有与电动车轮转动的板体结构;辅助滚轮,其转动连接在所述壳体侧壁面内壁,所述壳体内壁设置有与辅助滚轮转动连接的L状板体结构。该设有异物收集结构的管道机器人清理机构,通过装置内部的安装在壳体一侧的电动车轮推动壳体向管道内部活动,使得壳体一侧设置的弧形凸起结构,将附着在管道内壁的异物向壳体内部堆积收集,配合外壁面的刮板进一步处理管道内部异物的清理使用。
技术研发人员:王锋,王演铭,肖恒,孙善飞,董广山,丁勇
受保护的技术使用者:国能寿光发电有限责任公司
技术研发日:20230414
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!