光伏板清洁机器人的制作方法
本申请涉及光伏板清洁,具体而言,涉及一种光伏板清洁机器人。
背景技术:
1、光伏电站主要是通过光伏板吸收太阳能发电,光伏板因为需要放置在室外吸收阳光。所以光伏板的表面会积攒大量的灰尘,进而影响光伏板对于光能的吸收。所以光伏电站的光伏板需要定期清理。
2、在对光伏板的清理过程中,一般需要先擦拭、再洒清洁剂,清洗一次;然后再先洒清洁剂、再擦拭一次;所以在现有方案中,一般都是对光伏板来回清洗一次,第一清洗的时候是先擦拭,再喷清洁剂,第二次回来的时候,则是先喷清洁剂,再擦拭。如此,保证了清洁效果。
3、但是,这种方案会导致清洁效率很低,无论是人工操作,还是采用机器操作,都需要对同一个区域,进行一个来回的清洗工作,所以清洁效率低下。
技术实现思路
1、本申请的内容部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本申请的内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
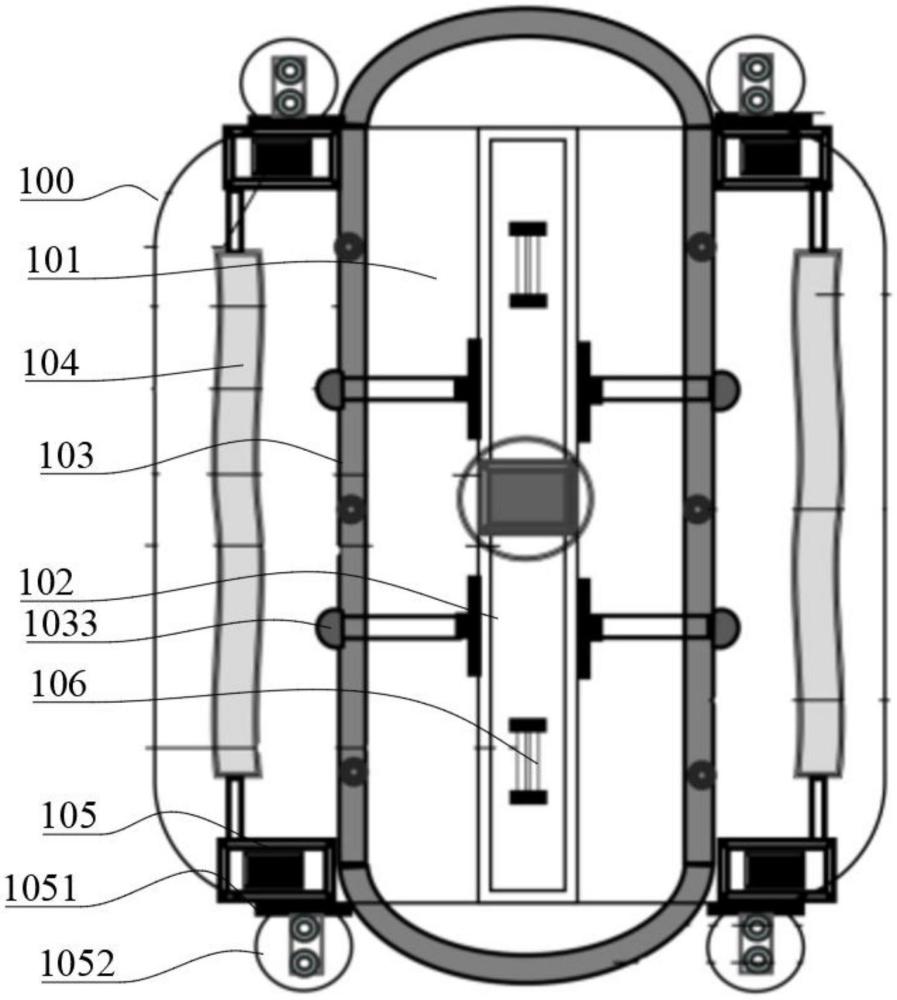
2、为了解决现有的光伏板清洁效率低下的技术问题,本申请的一些实施例提供了一种光伏板清洁机器人,包括:
3、支架,
4、水箱 ,设置在支架上;
5、环形水管,与水箱连通;
6、清洁辊,设置在支架上;
7、其中,清洁辊至少设置有两个,两个清洁辊分别设置在环形水管的两侧;
8、环形水管至少包括两个相互平行的喷水段,喷水段上设置有多个喷淋头,两个喷水段分别位于清洁辊的一侧。
9、在本申请所提供的方案中,在环形水管的两侧分别布置一个清洁辊,在环形水管上设置多个喷淋头,进而能够形成清洁辊-喷淋头-清洁辊的结构。同时,将环形管设置为有两个喷水段,并且分别设置在清洁辊的一侧。进而能够形成清洁辊-喷淋头-喷淋头-清洁辊的结构。从而在驱动机器人在光伏板上移动时,先是清洁辊对光伏板进行擦拭,然后喷清洁液,进行冲洗,再然后喷出新的清洁液,将原先的脏清洁液冲走,最后用清洁辊擦拭。只需要移动一次,就相当于完成了擦拭、再洒清洁剂和洒清洁剂再擦拭的两步清洁工作,增加了清洁效率。
10、进一步的,喷水段的长度大于清洁辊的长度。
11、本方案中,通过将喷水段的长度设置为大于清洁辊的长度,所以能够更好的在擦拭时,提供相应的清洁水,以对擦拭过的区域,进行冲洗。
12、进一步的,环形水管还包括两个弧形段,两个弧形段分别连接在喷水段的首尾两端;同一个弧形段的首尾两端,连接两个不同的喷水段。
13、本方案中,通过设置两个弧形段,将两个平行布置的喷水段连通;同时,连接的部分为弧形设置,进而环形水管内的水流,不会直接冲击在环形水管的内壁上,而是会随着环形段流动,所以避免了喷水段与弧形段相连的区域,因为受到很大的水流冲击,而容易损坏。
14、在光伏变电站中,光伏板的面积很大,全部依靠人力去推动清洁机器人在光伏板上移动,来实现光伏板的清洁,非常费时费力,针对这一问题,本申请提供如下技术方案:
15、进一步的,支架上还设置有驱动件,驱动件的动力输出轴连接有导向轮。
16、本方案中,通过在支架上设置驱动件和导向轮,所以驱动件在驱动导向轮转动之后,清洁机器人能够不需要人力,而自己在光伏板上运动,进而起到省时省力的效果。
17、进一步的,支架上还设置有红外检测装置。
18、通过在支架上设置红外检测装置,能够对光伏板进行检测,进而随着清洁的进行,还能够对光伏板是否存在瑕疵进行检测。
19、进一步的,喷淋头为电控喷头。
20、通过在喷淋头设置电控喷头,从而能够根据需要控制喷淋头喷出的水流大小。
21、进一步的,驱动件为电机,驱动件的动力输出轴连接至减速器,减速器的动力数轴连接至导向轮。
22、本方案中,通过设置减速器,能够增加动力输出的稳定性。
23、进一步的,支架上还设置有握把。
24、进一步的,支架上还设置有吸盘。
技术特征:
1.一种光伏板清洁机器人,其特征在于,包括:
2.根据权利要求1所述的光伏板清洁机器人,其特征在于:喷水段的长度大于清洁辊的长度。
3.根据权利要求2所述的光伏板清洁机器人,其特征在于:环形水管还包括两个弧形段,两个弧形段分别连接在喷水段的首尾两端;同一个弧形段的首尾两端,连接两个不同的喷水段。
4.根据权利要求3所述的光伏板清洁机器人,其特征在于:支架上还设置有驱动件,驱动件的动力输出轴连接有导向轮。
5.根据权利要求3所述的光伏板清洁机器人,其特征在于:支架上还设置有红外检测装置。
6.根据权利要求2所述的光伏板清洁机器人,其特征在于:喷淋头为电控喷头。
7.根据权利要求6所述的光伏板清洁机器人,其特征在于:驱动件为电机,驱动件的动力输出轴连接至减速器,减速器的动力数轴连接至导向轮。
8.根据权利要求1所述的光伏板清洁机器人,其特征在于:支架上还设置有握把。
9.根据权利要求8所述的光伏板清洁机器人,其特征在于:支架上还设置有吸盘。
技术总结
本申请公开了光伏板清洁机器人。一种光伏板清洁机器人,支架,水箱,设置在支架上;环形水管,与水箱连通;清洁辊,设置在支架上;其中,清洁辊至少设置有两个,两个清洁辊分别设置在环形水管的两侧;形水管至少包括两个相互平行的喷水段,喷水段上设置有多个喷淋头,两个喷水段分别位于清洁辊的一侧。本申请提供了一种增加了清洁效率的光伏机器人。
技术研发人员:王再望,李鸿,郑果果,高学平,徐志瑞,董晓宁,胡晓辉,刘伟,张卓龙,杨晓峰,余波,马全林
受保护的技术使用者:宁夏隆基宁光仪表股份有限公司
技术研发日:20230731
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!