一种核电厂用可越障的风管清理机器人的制作方法
本技术涉及管道清理,具体是一种核电厂用可越障的风管清理机器人。
背景技术:
1、在核电厂工程建设期间以及商业运行过程中,通风系统中的风管积累大量灰尘、渣滓碎屑等,导致下游厂房送风质量下降,灰尘颗粒将影响厂房内电仪相关敏感机柜可靠性,同时也影响现场工作人员身心健康。因此,核电厂通风系统风管清理工作十分重要。
2、目前核电厂常采用人员或常规空调系统清理机器人对通风系统管道进行清理,但受制于厂房空间紧凑和电气厂房均布置各类敏感机柜的现状,风管布置特殊,布置角度大且底部风口高出风管底面,人员及常规清理机器人无法有效对风管进行清理。
技术实现思路
1、本实用新型要解决的技术问题就是克服以上的技术缺陷,提供一种核电厂用可越障的风管清理机器人。
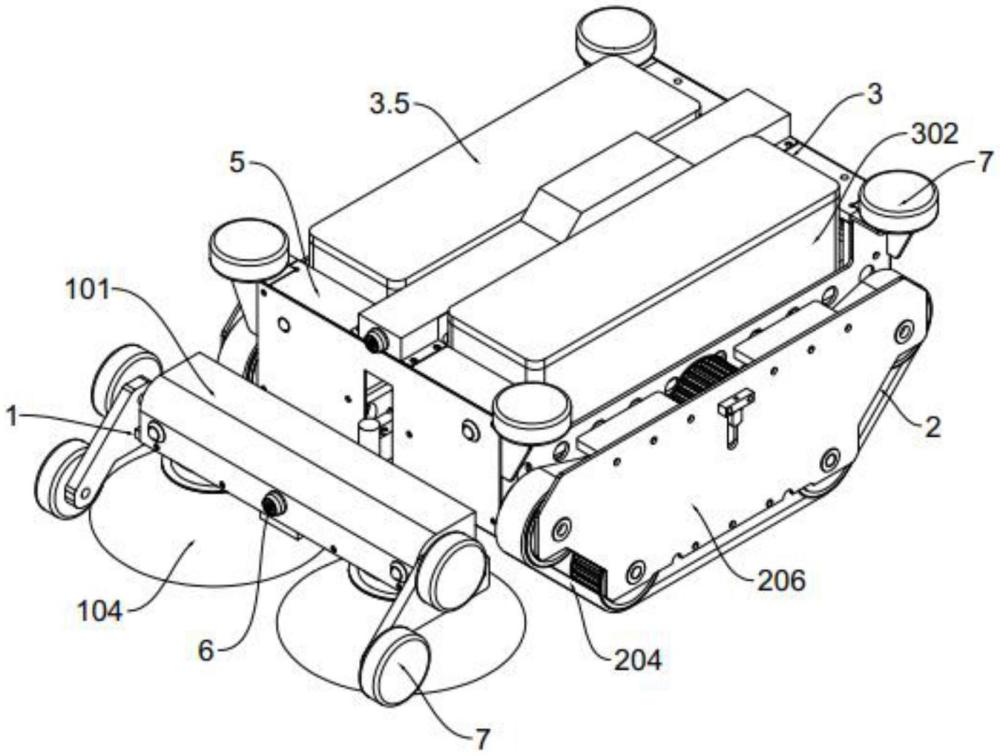
2、为了解决上述问题,本实用新型的技术方案为:一种核电厂用可越障的风管清理机器人,包括清扫机构、行走机构、集尘机构、辅助支撑机构、主体框架、遥感器、和防撞轮;
3、所述清扫机构包括电机防护罩、盘刷电机、清扫机构支架、盘刷、丝杠、丝杠螺母、导向轴、直线轴承和升降电机;所述盘刷电机设有两个且对称固定安装在清扫机构支架前端,所述盘刷电机的输出轴上连接有盘刷;所述升降电机固定安装在主体框架上,且其输出轴与控制丝杠相连接;所述丝杠螺母和直线轴承均固定安装在清扫机构支架上;
4、所述行走机构包括驱动电机、主动轮、同步轮、履带、辅助轮、防护板、连接块和连接板;所述连接板设有两个且对称安装在主体框架的两侧;所述防护板和连接板通过穿过连接块的螺栓相连接;所述驱动电机安装在连接板内侧,且其输出轴连接有主动轮;所述主动轮和同步轮均固定安装在防护板和连接板之间,所述履带安装于主动轮和同步轮的外侧;
5、所述集尘机构包括集尘口、集尘盒外壳、集尘舱、过滤网支架、集尘盒盖和风机,所述过滤网支架上粘接有过滤网,所述集尘口固定安装在主体框架底部;所述集尘舱、过滤网支架和风机放置于集尘盒外壳内部,且所述风机位于集尘舱与集尘盒外壳内壁之间,所述过滤网支架位于集尘舱顶部;
6、所述辅助支撑机构包括前气缸和后气缸,所述前气缸和后气缸的活塞杆上分别固定安装有前支撑轮和后支撑轮;
7、所述遥感机构安装于主体框架前、后端和清扫机构前端,所述防撞轮安装于主体框架和清扫机构的四角位置。
8、进一步,所述丝杠转动安装于主体框架内侧,导向轴固定安装于主体框架内侧,且所述导向轴设有两个且对称分布在丝杠两侧。
9、进一步,所述直线轴承设有两个且对称分布在丝杠螺母两侧,所述丝杠螺母与丝杠螺纹连接,所述直线轴承套设在导向轴外侧。
10、进一步,所述同步轮与主动轮将履带保持为倒梯形结构,所述辅助轮安装在连接板上,并可通过顶丝调整位置,使履带张紧。
11、进一步,所述集尘口的进口为长方形,出口为两个圆管,两个所述圆管分别与两个集尘舱通过导管连接。
12、进一步,所述集尘盒外壳通过螺栓安装在主体框架上,且所述集尘盒外壳和集尘盒盖之间形成气流通路,灰尘将沿着气流方向运动,经过过滤网支架时被过滤网阻挡留在集尘舱内。
13、进一步,所述前气缸安装在清扫机构支架上,且位于清扫机构与主体框架之间;所述后气缸安装在主体框架后端。
14、本实用新型与现有的技术相比的优点在于:1、采用坦克式履带结构,在上坡时可以产生更大仰角,越障高度也随之提高;2、采用升降电机和丝杠组成升降结构,实现清扫机构升降,避免越障时被清扫机构阻碍,保证了越障功能能够顺利实现。3、通过在主体框架上安装软弹材质防撞轮,在运行过程中,风管清理机器人与通风管道之间不会产生硬质碰撞,避免了管道损伤的同时也保护了清理机器人,提高了设备的可靠性;4、通过辅助支撑机构能够在清理机器人爬坡和下坡时进行辅助支撑,提升清理机器人爬坡和下坡的安全性,且提高了清理机器人的越障能力。
技术特征:
1.一种核电厂用可越障的风管清理机器人,其特征在于:包括清扫机构(1)、行走机构(2)、集尘机构(3)、辅助支撑机构(4)、主体框架(5)、遥感器(6)、和防撞轮(7);
2.根据权利要求1所述的一种核电厂用可越障的风管清理机器人,其特征在于:所述清扫机构支架(103)上还安装有用于在清扫机构支架(103)移动到限位位置时控制升降电机(109)停止工作的限位开关(110)。
3.根据权利要求1所述的一种核电厂用可越障的风管清理机器人,其特征在于:所述丝杠(105)转动安装于主体框架(5)内侧,导向轴(107)固定安装于主体框架(5)内侧,且所述导向轴(107)设有两个且对称分布在丝杠(105)两侧。
4.根据权利要求1所述的一种核电厂用可越障的风管清理机器人,其特征在于:所述直线轴承(108)设有两个且对称分布在丝杠螺母(106)两侧,所述丝杠螺母(106)与丝杠(105)螺纹连接,所述直线轴承(108)套设在导向轴(107)外侧。
5.根据权利要求1所述的一种核电厂用可越障的风管清理机器人,其特征在于:所述同步轮(203)与主动轮(202)将履带(204)保持为倒梯形结构,所述辅助轮(205)安装在连接板(208)上,并可通过顶丝调整位置,使履带(204)张紧。
6.根据权利要求1所述的一种核电厂用可越障的风管清理机器人,其特征在于:所述集尘口(301)的进口为长方形,出口为两个圆管,两个所述圆管分别与两个集尘舱(303)通过导管连接。
7.根据权利要求1所述的一种核电厂用可越障的风管清理机器人,其特征在于:所述集尘盒外壳(302)通过螺栓安装在主体框架(5)上,且所述集尘盒外壳(302)和集尘盒盖(305)之间形成气流通路,灰尘将沿着气流方向运动,经过过滤网支架(304)时被过滤网阻挡留在集尘舱(303)内。
8.根据权利要求1所述的一种核电厂用可越障的风管清理机器人,其特征在于:所述前气缸(401)安装在清扫机构支架(103)上,且位于清扫机构(1)与主体框架(5)之间;所述后气缸(402)安装在主体框架(5)后端。
技术总结
本技术公开了一种核电厂用可越障的风管清理机器人,包括清扫机构、行走机构、集尘机构、遥感器、主体框架、防撞轮和辅助支撑机构。清扫机构通过丝杠和导向轴与主体框架相连;行走机构的连接板与主体框架通过螺栓连接,通过控制左右行走机构从而控制机器人前后移动、转弯;集尘机构与主体框架通过螺栓连接;遥感器布置于主体框架前、后端和清扫机构前端;防撞轮布置于主体框架和清扫机构的四角位置。本技术与现有的技术相比的优点在于:提升了越障高度且避免机器人在越障时被清扫机构阻碍,同时提高了设备的可靠性和安全性,且提高了清理机器人的越障能力。
技术研发人员:魏传胜,张金富,赵润松,栾胜军,左广江,付祥冲,杨建强,任伟,贾亚雄,翟连付
受保护的技术使用者:辽宁红沿河核电有限公司
技术研发日:20230803
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!