一种用于声屏障清洁的机器人的制作方法
本技术涉及一种噪声防护装置附件,尤其是涉及一种用于声屏障清洁的机器人。
背景技术:
1、声屏障是指在声源和接收者之间插入一个设施,使声波传播有一个显著的附加衰减,从而减弱接收者所在的一定区域内的噪声影响。分为交通隔音屏障、设备噪音衰减隔音屏障、工业厂界隔音屏障、公路和高速公路上是使用各类型声屏障最多的地方。为了增强声屏障的采光性,顶部采用一般采用pc、亚克力等透光材料。在自然环境下采光屋顶会积累灰尘造成采光度下降,因此定期清洗透光材料成为日常维护声屏障的一项重要工作。
2、现有的清洁机器人大部分适用于平面、竖直面或者稍微倾斜的斜面,比如太阳能板、玻璃幕墙的清洁等,而针对现有的全封闭声屏障的清洁方法较少,大部分采用人工清洁,费时费力,工作环境也不安全,如何提供一种可实现自动清洁的声屏障的机器人成为目前急需解决的问题。
技术实现思路
1、本实用新型所要解决的技术问题是提供了一种安全可靠的用于声屏障清洁的机器人。
2、本实用新型为解决上述技术问题采用的技术方案为:
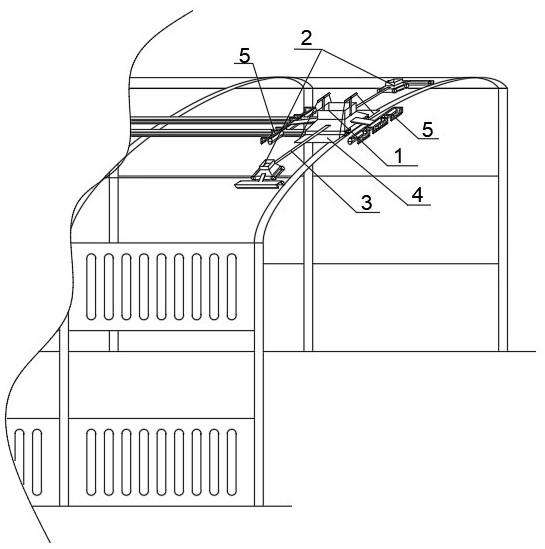
3、一种用于声屏障清洁的机器人,所述声屏障为全封闭声屏障或半封闭声屏障,所述机器人设置在所述声屏障的上表面上,所述机器人包括主转移机器人和子机器人,所述主转移机器人和子机器人之间设置有牵引绳,所述主转移机器人上设置有用来接驳子机器人的接驳平台,所述主转移机器人和子机器人上还设置有用于提供电力的电源模块、清洁模块和控制模块,所述清洁模块包括喷淋系统和清洗滚刷,所述控制模块包括用于控制所述主转移机器人和子机器人前后运动的移动驱动模块、用于控制所述喷淋系统和所述清洗滚刷工作的清洗驱动模块。
4、优选的,所述主转移机器人上的清洗滚刷为两个,分别设置在所述主转移机器人的前后两端,所述子机器人上的清洗滚刷为一个,设置在所述子机器人的远离所述牵引绳的一端。
5、优选的,所述声屏障的上侧面的纵向方向固定设置有可供所述主转移机器人来回行驶的轨道。
6、优选的,所述轨道为双轨道,所述清洗滚刷处于两轨道之间。
7、优选的,所述子机器人为一个或两个,其分别设置在所述主转移机器人的一侧或者两侧。
8、优选的,所述主转移机器人还设置有功能模块和传感器模块,所述功能模块包括用于牵引固定所述子机器人收放的滑索卷扬模块和张紧调节模块,所述传感器模块包括用于接收遥控器信号的红外线接收器和用于测量所述主转移机器人运行距离的超声波测距传感器。
9、优选的,所述清洁模块还包括废水收集装置,所述废水收集装置设置在所述清洗滚刷的外侧,所述废水收集装置包括一刮水板和位于所述刮水板端部的负压吸水装置。
10、本实用新型的有益效果为:本实用新型提供的用于声屏障清洁的机器人,机器人可放置在声屏障的上表面进行清洁工作,通过远程遥控,即可实现声屏障上表面的全方位清洗,安全性能高,不影响正常的交通通行,远程遥控方式避免了作业人员的高空坠落风险,而且清洗效率高,耗费人工少,机器人经济适用,作业方便快捷。
技术特征:
1.一种用于声屏障清洁的机器人,所述声屏障为全封闭声屏障或半封闭声屏障,所述机器人设置在所述声屏障的上表面上,其特征在于,所述机器人包括主转移机器人和子机器人,所述主转移机器人和子机器人之间设置有牵引绳,所述主转移机器人上设置有用来接驳子机器人的接驳平台,所述主转移机器人和子机器人上还设置有用于提供电力的电源模块、清洁模块和控制模块,所述清洁模块包括喷淋系统和清洗滚刷,所述控制模块包括用于控制所述主转移机器人和子机器人前后运动的移动驱动模块、用于控制所述喷淋系统和所述清洗滚刷工作的清洗驱动模块。
2.根据权利要求1所述的用于声屏障清洁的机器人,其特征在于,所述主转移机器人上的清洗滚刷为两个,分别设置在所述主转移机器人的前后两端,所述子机器人上的清洗滚刷为一个,设置在所述子机器人的远离所述牵引绳的一端。
3.根据权利要求1所述的用于声屏障清洁的机器人,其特征在于,所述声屏障的上侧面的纵向方向固定设置有可供所述主转移机器人来回行驶的轨道。
4.根据权利要求3所述的用于声屏障清洁的机器人,其特征在于,所述轨道为双轨道,所述清洗滚刷处于两轨道之间。
5.根据权利要求1所述的用于声屏障清洁的机器人,其特征在于,所述子机器人为一个或两个,其分别设置在所述主转移机器人的一侧或者两侧。
6.根据权利要求5所述的用于声屏障清洁的机器人,其特征在于,所述主转移机器人还设置有功能模块和传感器模块,所述功能模块包括用于牵引固定所述子机器人收放的滑索卷扬模块和张紧调节模块,所述传感器模块包括用于接收遥控器信号的红外线接收器和用于测量所述主转移机器人运行距离的超声波测距传感器。
7.根据权利要求5所述的用于声屏障清洁的机器人,其特征在于,所述清洁模块还包括废水收集装置,所述废水收集装置设置在所述清洗滚刷的外侧,所述废水收集装置包括一刮水板和位于所述刮水板端部的负压吸水装置。
技术总结
本技术提供一种用于声屏障清洁的机器人,所述声屏障为全封闭声屏障或半封闭声屏障,所述机器人设置在所述声屏障的上表面上,其特征在于,所述机器人包括主转移机器人和子机器人,所述主转移机器人和子机器人之间设置有牵引绳,所述主转移机器人上设置有用来接驳子机器人的接驳平台,所述主转移机器人和子机器人上还设置有用于提供电力的电源模块、清洁模块和控制模块,机器人可放置在声屏障的上表面进行清洁工作,通过远程遥控,即可实现声屏障上表面的全方位清洗,安全性能高,不影响正常的交通通行,远程遥控方式避免了作业人员的高空坠落风险,而且清洗效率高,耗费人工少,作业方便快捷。
技术研发人员:杨漫,康毅,彭翰泽
受保护的技术使用者:西藏中驰集团股份有限公司
技术研发日:20231007
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!